
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Окончательная точность положения пунктов СГС-1 определяется по материалам обработки в соответствии с нормативно-техническими актами по построению СГС-1, утверждаемыми Роскартографией.
Для связи СГС-1 с АГС и нивелирной сетью часть пунктов СГС-1 должна быть совмещена или связана с существующими пунктами АГС и реперами нивелирной сети не ниже Ш класса. Связь, как правило, должна определяться относительным методом космической геодезии со средними квадратическими ошибками не более 2 см для плановых координат при привязке пунктов АГС и 1 см для геодезических высот при привязке нивелирных реперов. При высотной привязке использование пунктов АГС с известными нормальными высотами вместо нивелирных реперов не допускается. Расстояние между пунктами АГС, совмещенными с пунктами СГС-1 или привязанными к ним, не должно быть больше 70 км при средней плотности СГС-1 и 100 км при построении разреженной сети СГС-1 в необжитых районах. Расстояние между нивелирными реперами для связи с пунктами СГС-1 должно быть не более 100 км.
В случае необходимости могут создаваться геодезические сети сгущения в соответствии с нормативно-техническими актами, утверждаемыми Роскартографией.
Повторные определения координат пунктов ГТС и высот реперов должны планироваться в необходимом объеме и с требуемой точностью для выявления деформаций земной поверхности и изучения закономерностей их изменений
При необходимости повторных определений координат пунктов в сейсмоактивном регионе построение СГС-1 планируется с повторным определением пунктов ВГС на этой и смежной территориях.
В районах происшедших землетрясений с магнитудой 5 и более повторное определение координат пунктов геодезических сетей проводится в возможно короткие сроки. Протяженность создаваемых фрагментов СГС-1, включая пункты ВГС, на которые опираются фрагменты СГС-1, должна обеспечивать опору на пункты, не затронутые влиянием произошедшего землетрясения. Необходимость повторных определений координат пунктов геодезических сетей, обусловленная деформациями техногенного происхождения., обосновывается маркшейдерскими и другими геолого-геофизическими данными.
Пункты СГС-1, совмещенные или связанные с реперами нивелирной сети 1...111 классов, используются для уточнения высот квазигеоида.
В исключительных случаях в районах, не обеспеченных необходимыми данными о высотах квазигеоида, для определения нормальных высот допускается применение тригонометрического нивелирования. В последнем случае средняя квадратическая ошибка взаимного положения смежных пунктов по высоте должна быть не более 20 см.32.4.
Геодезические сети специального назначения
Геодезические сети специального назначения создаются в тех случаях, когда дальнейшее сгущение пунктов ГГС экономически нецелесообразно или когда требуется особо высокая точность геодезической сети.
Геодезические сети специального назначения создаются в единых государственных системах координат или в установленном порядке в местных системах координат.
Учет и хранение исходных данных, раскрывающих переход от местных систем координат к государственным системам координат (ключи перехода) осуществляется органами государственного геодезического надзора (Госгеонадзора).
3.4 Основные проблемы, возникающие при согласовании существующей государственной плановой и высотной основы с результатами спутниковых координатных определений. Принципы решения этой проблемы.
Определения координат, выполняемые оперативно и с высокой точностью с помощью спутниковых технологий, должны быть связаны с государственной координатной основой. Четыре фактора создают проблему корректного совместного использования спутниковых и традиционных опорных геодезических сетей [1].
Первый фактор - точностной. Он заключается в том, что точность относительного положения пунктов спутниковой сети примерно на порядок выше, а в некоторых случаях и более, чем соответствующая точность существующей ГГС.
Второй фактор - физический. Он состоит в том, что плановая (ГГС) и высотная (ГНС) государственные основы не образуют единую трехмерную пространственную координатную систему, поскольку созданы в различных физических системах отсчета: ГГС - в геометрической (референц-эллипсоид), ГНС - в гравитационной (система нормальных высот). Точность связи ГГС и ГНС в единой системе через высоты квазигеоида, примерно, на порядок ниже, чем точность взаимного положения точек в ГГС и ГНС. Спутниковая сеть, в противоположность традиционной геодезической сети, образует трехмерную пространственную систему с примерно равными по точности координатами (точность высот меньше точности плановых координат лишь в 1,5 – 2 раза).
Третий фактор - математический. Он заключается в том, что при согласовании спутниковых и традиционных геодезических сетей на ограниченной территории система уравнений связи координат плохо обусловлена. В условиях неизбежных погрешностей измерений и модели встает задача корректного выделения из всей совокупности исходной информации устойчивой части решения, согласованной с точностью входных данных.
Четвертый фактор - нормативно-технический. Он связан с введением спутникового каталога и нормативно-технической документации для технически грамотного использования спутниковой сети в различных приложениях.
Проблемы, связанные с первыми тремя факторами, могут быть решены разработкой регулярной модели трансформирования координат, отвечающей следующим системным требованиям:
1) математическая модель трансформирования должна быть адекватна в пространстве измерений и в пространстве оцениваемых параметров;
2) математическая модель трансформирования должна быть наблюдаема;
3) алгоритм оценивания параметров модели должен быть состоятелен.
Математическая модель трансформирования должна обеспечивать пространственное преобразование спутниковой геодезической сети в референцную систему координат без изменения геометрии и масштаба сети, чтобы не деформировать более точную спутниковую геодезическую сеть при ее “вставке” в государственную координатную основу. Чтобы не допустить потери точности при воспроизведении координат, относительная погрешность математической модели трансформирования должна быть как минимум на порядок меньше погрешности высокоточных спутниковых измерений. Это значит, что методическая погрешность модели должна быть порядка десятых долей миллиметра.
4. Классические (теория ) и современные принципы определения внешнего гравитационного поля Земли (4 часа)
Основные положения теории определения физической поверхности Земли и ее внешнего гравитационного поля.
Современные способы определения элементов внешнего гравитационного поля Земли. Глобальный и региональный геоид. Региональный и локальный квазигеоид. Способы определения аномалий высоты, отклонений отвеса, астрономических координат и азимутов с помощью спутниковых средств измерений и математической модели кавзигеоида.
4.1 Основные положения теории определения физической поверхности Земли и ее внешнего гравитационного поля.
Применение формулы Стокса для определения высот геоида относительно общего земного эллипсоида наталкивается на серьезные трудности. Во-первых, для интегрирования необходимо, чтобы гравитационные аномалии были известны по всей поверхности Земли, более двух третей которой покрыта морями и океанами. Измерение силы тяжести на поверхности океанов стало возможно лишь в ХХ столетии.
Вторая проблема -- более серьезная. Теория Стокса требует, чтобы все массы лежали под уровенной поверхностью, называемой геоидом. Кроме того, измерения силы тяжести выполняются на физической поверхности, не совпадающей с геоидом. Задача состоит в том, чтобы в измеренной значение внести такие поправки, которые бы перенесли все массы под уровень моря, не изменяя самой уровенной поверхности, а сила тяжести оказалась бы отнесенной к уровню моря (геоиду). Эта проблема широко обсуждалась в научной литературе и получила название проблемы регуляризации Земли.
Оказалось, что для успешного решения проблемы регуляризации необходимо знать внутреннее строение Земли. В научный спор о том, как решать проблему регуляризации, в 50-х годах вмешался , который доказал, что различные варианты решения практически эквивалентны, но они не решают задачу вполне строго. Он предложил строгое решение задачи определения фигуры Земли. При этом определяются высоты не поверхности, которую мы называем геоидом, а другой поверхности, достаточно близкой к геоиду, которую он назвал квазигеоидом.
разработал теорию построения квазиеоида, предложил алгоритмы приближенного решения проблемы. Во-первых, редукция (перенос) силы тяжести или потенциала выполняется в линейном приближении. Во-вторых, хотя все измерения и редукции относятся к физической поверхности или к эллипсоиду, интегрирование малых функций, где это требуется, выполняется по сфере (сферическое приближение). Конечно, теория Молоденского не окончательная. Она постоянно совершенствуется его учениками. В Советском Союзе возникла школа Молоденского, которая широко известна не только у нас, но и за рубежом.
4.2 Ортометрические и нормальные высоты
Нивелирный ход от точки О, расположенной, например, на уровне моря, к точке Р даст измеренную высоту точки Р над уровнем моря ![]() , где
, где ![]() нивелирное превышение одного звена. Если нивелирный ход имеет много звеньев, то сумму можно заменить интегралом
нивелирное превышение одного звена. Если нивелирный ход имеет много звеньев, то сумму можно заменить интегралом  .
.
Вычислим разность потенциалов меду точками О и Р.
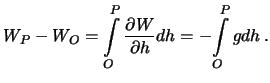
Таким образом, для определения разности потенциалов нужно иметь нивелирные превышения и силу тяжести вдоль всего профиля.
Введем в рассмотрение еще одну точку. Через точку Р проходит силовая линия, которую можно продолжить до поверхности геоида (уровень моря). Она пересечется с этой поверхностью в токе Р'. Таким образом точки О и Р' лежат на одной поверхности уровня (на геоиде) Поскольку результат определения разности потенциалов не зависит от пути интегрирования, выберем такой маршрут О-Р'-Р. Приращение потенциала мы получим лишь на отрезке силовой линии Р'-Р:  . При движении по силовой линии сила тяжести непрерывно меняется. Согласно теореме о среднем, в курсе математического анализа, можно найти такое значение подынтегральной функции, которое она принимает внутри интервала интегрирования, которым можно заменить подынтегральное выражение
. При движении по силовой линии сила тяжести непрерывно меняется. Согласно теореме о среднем, в курсе математического анализа, можно найти такое значение подынтегральной функции, которое она принимает внутри интервала интегрирования, которым можно заменить подынтегральное выражение
Отрезок силовой линии РР' называется ортометрической высотой точки над уровнем моря (то есть над геоидом). Итак
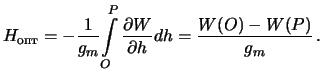
Чтобы вычислить ортометрическую высоту, необходимо знать не только приращение потенциала, но и уметь вычислить среднее значение силы тяжести на отрезке силовой линии, а для этого необходимо знать как меняется сила тяжести на этом отрезке внутри Земли. предложил заменить ![]() на среднее значение нормально силы тяжести. Высоту, которую мы таким образом получим он назвал нормальной. Такая замена неизбежно внесет погрешность, которая, впрочем, невелика. Согласно определению, нормальная высота может быть определена по формуле
на среднее значение нормально силы тяжести. Высоту, которую мы таким образом получим он назвал нормальной. Такая замена неизбежно внесет погрешность, которая, впрочем, невелика. Согласно определению, нормальная высота может быть определена по формуле
Поскольку ортометрическая высота есть высота точки над уровнем моря, то мало отличающаяся от нее нормальная высота будет равна высоте точки от поверхности мало отличающейся от геоида. Молоденский назвал эту поверхность квазигеоидом.
Отличие истинной (геодезической) высоты от нормальной уместно назвать аномалией высоты. Это понятие также ввел Молоденский. Итак, аномалия высоты есть
Аномалия высоты есть расстояние квазигеоида от эллипсоида, или равна высоте почтигеоида. Очевидно, что ![]() . В классическом понимании, определить фигуру Земли -- это значит определить высоты геоида N. Однако, мы не сделаем большой погрешности, если будем считать фигурой Земли -- фигуру квазигеоида, а для этого мы должны определить аномалии высот.
. В классическом понимании, определить фигуру Земли -- это значит определить высоты геоида N. Однако, мы не сделаем большой погрешности, если будем считать фигурой Земли -- фигуру квазигеоида, а для этого мы должны определить аномалии высот.
Сведем задачу снова к краевой задаче для гармонических функций. Следовательно, аномалию высоты нужно определить через возмущающий потенциал. Итак, имеем:
потенциал тяжести в точке Р равен ![]() , С -- приращение потенциала от уровня моря (точка );
, С -- приращение потенциала от уровня моря (точка );
нормальный потенциал в точке Р0, равный ![]() .
.
Таким образом, точка Р не совпадает с точкой Р0, так как она подбирается так, чтобы приращение потенциала реального и нормального были одинаковыми

Здесь постоянные ![]() и
и ![]() означают следующее: первая постоянная есть величина потенциала тяжести на геоиде, а вторая -- величина нормального потенциала на уровенном эллипсоиде. Нетрудно убедиться, что отрезок РР0 равен аномалии высоты z. Следовательно
означают следующее: первая постоянная есть величина потенциала тяжести на геоиде, а вторая -- величина нормального потенциала на уровенном эллипсоиде. Нетрудно убедиться, что отрезок РР0 равен аномалии высоты z. Следовательно

поэтому  .
.
С другой стороны  , поэтому
, поэтому

Отсюда следует
Мы получили вновь формулу Брунса, однако она отличается тем, что содержит дополнительный член  , который в "классической" формуле отсутствует. В теории Стокса предполагается, что обе эти постоянные равны: потенциал тяжести на уровне моря равен потенциалу уровенного эллипсоида.
, который в "классической" формуле отсутствует. В теории Стокса предполагается, что обе эти постоянные равны: потенциал тяжести на уровне моря равен потенциалу уровенного эллипсоида.
Другое отличие: нормальная сила тяжести задается не на геоиде, а в некоторой точке Р0, отстоящей от текущей токи на физической поверхности на величину, равную аномалии высоты. Геометрическое место всех точек Р0 называется теллуроидом. Гравитационные аномалии, как и прежде, относятся к разным точкам: наблюденное значение задано на физической поверхности, а нормальное -- на теллуроиде.
В литературе, посвященной исследованию гравитационных полей планет, встречаются и другие определения понятия теллуроида, как поверхности аппроксимирующую форму Земли.
Теллуроид Марусси определяется следующим образом. Теллуроид -- геометрическое место точек, в которых потенциал тяжести совпадает с нормальным ![]() .
.
Теллуроид Крарупа (гравиметрический теллуроид) -- геометрическое место точек, в котором нормальная сила тяжести совпадает с силой тяжести на поверхности Земли  .
.
Каждое из определений теллуроида требует своего подхода для определения его фигуры.
4.2 Современные способы определения элементов внешнего гравитационного поля Земли.
4.2.1 Модели геоида.
Модели геоида могут быть представлены в виде точечных значений, профилей или карт и могут аппроксимироваться некоторой функцией. Спектральная информация о геоиде, содержащемся в модели, имеет короткие, средние и длинные волны. Короткие волны, имеющие амплитуду порядка метра, не превышают 100 км, средние, с амплитудой до 10 м, имеют ширину от 100 до 1000 км.
Модели геоидов различают по размеру охватываемой ими территории и по методам получения их характеристик. Астрономо-геодезические геоиды строятся по уклонениям отвесной линии u и ее азимуту v:
![]() .
.
Уклонения отвеса в плоскости меридиана x и в плоскости первого вертикала z получаютсяиз сравнения геодезических и астрономических координат:
![]() .
.
Геодезические координаты можно находить из спутниковых наблюдений, или из наземных измерений (триангуляция, полигонометрия). Астрономические координаты определяют по наблюдениям звезд методами геодезической астрономии.
Наклон геоида q в исследуемой точке в направлении с азимутом А вычисляется по формуле:
![]() ,
,
приращение геоида по высоте определяется как
![]() ,
,
а передача высоты геоида от пункта А к пункту В происходит в соответствии с соотношением:
![]() .
.
В гравиметрическом методе высота геоида в точке А вычисляется по известной формуле Стокса:
![]() ,
,
в которой Y - угол между геоцентрическими радиусами точки А и элемента площади, ds, Dg – гравитационная аномалия для элемента поверхности, f(y) – функция Стокса. Аномалия ускорения силы тяжести вычисляется как разность измеренного значения ускорения с редукцией в свободном воздухе минус нормальное значение силы тяжести на эллипсоиде. Интегрирование по формуле (11.134) нужно вести на эллипсоиде по всему земному шару. Вклад далеких зон быстро убывает с увеличением углового расстояния Y и становится мал при Y>30°.
В астрономо-гравиметрических геоидах превышения геоида получаются гравиметрическим методом, но корректируются по астрономо-геодезическим данным на опорных пунктах. Спутниковые геоиды строятся на основе анализа возмущений в орбитах. В геометрических геоидах высоты геоида над эллипсоидом определяются из сравнения отметок пунктов, полученных из нивелирования, и геодезических высот, определенных, как и в астрономо-геодезическом методе, по спутниковым измерениям или классическими методами геодезии.
По размеру покрываемой территории (репрезентативности) различают три типа моделей геоидов: планетарные (глобальные), региональные и локальные.
4.2.2 Использование глобальных геоидов. В последнее время в качестве планетарных геоидов наибольшее распространение получили модели, представляющие собой набор полностью нормированных коэффициентов Cnm, Snm разложения потенциала силы тяжести по сферическим функциям. Высота геоида z в точке со сферическими координатами r, j, l может быть вычислена по формуле:
 ,
,
где ![]() - сферические координаты точки во внешнем гравитационном поле, a- большая полуось эллипсоида,
- сферические координаты точки во внешнем гравитационном поле, a- большая полуось эллипсоида, ![]() - нормализованные гармонические коэффициенты,
- нормализованные гармонические коэффициенты,  - нормализованные присоединенные функции Лежандра, связанные с ненормализованными присоединенными функциями Лежандра:
- нормализованные присоединенные функции Лежандра, связанные с ненормализованными присоединенными функциями Лежандра:
![]() ,
,
которые выражаются через полиномы Лежандра  степени n:
степени n:
![]() ,
,
![]() .
.
Нормализованные гармонические коэффициенты  связаны с ненормализованными коэффициентами:
связаны с ненормализованными коэффициентами:
 .
.
Множитель k в формулах (2.37) и (2.40) равен 1 при ![]() и равен 2 при
и равен 2 при ![]() .
.
Ускорение силы тяжести ![]() определяется по формуле Сомильяна (Somigliana):
определяется по формуле Сомильяна (Somigliana):
![]() ,
,
где a и b - большая и малая полуоси эллипсоида, а ![]() и
и ![]() - соответственно ускорения силы тяжести на экваторе и на полюсе. С числовыми значениями формула приводится к виду:
- соответственно ускорения силы тяжести на экваторе и на полюсе. С числовыми значениями формула приводится к виду:
![]() (мгал).
(мгал).
Реализации общеземных систем координат сопровождаются выводом параметров разложения потенциала тяготения и высот геоида над эллипсоидом, соответствующим данной системе координат. Модели с разложением до 36 степени и порядка обычно получают из анализа возмущений орбит спутников с применением динамического метода космической геодезии. Величины z получаются сглаженными, ошибки определения высот по глобальным моделям относительно велики и могут достигать нескольких метров. Одна из причин этого явления заключается в медленной сходимости ряда (2.41) и невозможности отображения локальных особенностей геоида современными методами разложений. Например, при разложении до 36 степени и до такого же порядка разрешающая способность аппроксимации высот геоида эквивалентна половине длины волны с расстоянием около 500 км. Известны более точные модели планетарных геоидов с разложениями до 180, 360 порядков. При их построении используются не только спутниковые данные, но и результаты гравиметрических измерений. Разложение до 180 степени и до такого же порядка обеспечивает разрешение 1°´1° с учетом волн геоида до 1-2 м. В хорошо изученных районах с плавным рельефом существующие глобальные модели позволяют достичь точности определения высот геоида порядка 0.6-1.0 м. [Галазин и др., 1998; DMA, 1991].
4.2.3 Глобальная модель геоида EGM2008
На сайте национального агентства геопространственных исследований Министерства обороны США (National Geospatial-Intelligence Agency – NGA) опубликованы результаты работы группы разработки EGM – новая гравитационная модель земли (EGM2008) степени 2160 [1]. Основные разработчики N. K. Pavlis1, S. A. Holmes2, S. C. Kenyon3, J. K. Factor4 представили конечную итерацию модельного подхода, результат разработки и анализа нескольких последовательно созданных предварительных гравитационных
моделей (PGM) все лучшего и лучшего представления. Из этих моделей модель PGM2007A была высоко оценена международной рабочей группой, спонсором которой является международная ассоциация геодезии (IAG).
Модель EGM2008 включает в себя детальные гравитационные аномалии в разрешении 5x5 минут и использует преимущества новейших спутниковых решений на базе GRACE, содержит улучшенные, полученные из альтиметрии, аномалии силы тяжести, рассчитанные при использовании PGM2007B (вариант PGM2007A), и модели динамической топографии океана (DOT).
Опубликованные материалы содержат собственно модель EGM2008 в виде коэффициентов сферических гармоник и вычисленные аномалии высот геоида с разрешением 1'x1' и 2,5’x2,5’, программы интерполяции и вырезки участков и тексты программ на языке FORTRAN. Приведена дополнительная информация в виде статей и презентаций.
В модели используются следующие константы, связывающие референц-эллипсоид и нормальное гравитационное поле:
− a=6378137.00 m (большая полуось эллипсоида WGS 84);
− f=1/298. (сжатие эллипсоида WGS 84);
− GM=3. x 1014 m3s-2 (геоцентрическая гравитационная постоянная);
− ω=7292115 x 10-11 radians/sec (угловая скорость вращения Земли).
В целом закон распределения разностей близок к нормальному, о чем свидетельствуют результаты статистического анализа распределения, соответствующего разностям высот:
− систематическое смещение модели EGM2008 относительно результатов спутниковых определений и геометрического нивелирования, вызванное разницей отсчетных высот,
разностью поверхностей геоида и квазигеоида, составляет +5,0 см при σ =5,3 см. − значения асимметрии и эксцесса разностей высот равны -0,426 и -0,168, что не превышает их критических значений (0,539 и 0,359 соответственно) при 95-процентном уровне значимости.
Исследования показывают:
1. Модель EGM2008 существенно точнее модели EGM96, и ее можно рекомендовать для замены модели EGM96 в тех работах, в которых модель EGM96 использовалась.
2. Повышение точности модели геоида расширяет спектр работ, в которых трудоемкое наземное геометрическое и тригонометрическое нивелирование можно не выполнять или выполнять как контрольное, ограничившись спутниковыми измерениями (например, геодезическое обеспечение геофизических методов геологоразведки, топографические работы в средних и мелких масштабах).
3. Вместе с тем выполненная предварительная оценка показывает необходимость более углубленного исследования модели с привлечением дополнительной информации – полной совместно уравненной высотной составляющей СГС республики и точностных характеристик спутниковых измерений, данных гравиметрии, большего объема информации, покрывающей всю территорию республики, и большей плотности данных. Кроме того, для этой работы,
очевидно, необходимо привлечь данные сопредельных государств. Конечной целью такого исследования должна являться региональная модель геоида Республики Беларусь точности 2-3 см, основой которой и может служить модель EGM2008.
4.2.4 Региональные и локальные модели геоида
В региональных моделях высоты геоида представляются в виде значений, заданных в узлах регулярной сетки. Обычно такие модели создаются на основе гравиметрической информации и охватывают территорию в несколько десятков градусов по широте и долготе с шагом сетки несколько минут. Для определения высоты геоида по региональной модели в исследуемой точке достаточно выбрать значения в ближайших к ней узлах сетки и выполнить интерполяцию. Примерами региональных моделей геоида являются известные модели GEOID90, GEOID93, GEOID96, создаваемые Национальной геодезической службой США для территории страны и соседних с ней областей [Leick 1995; Milbert 1992].
Под локальной моделью высот геоида понимается совокупность значений высот, вычисленных в результате сопоставления эллипсоидальных высот H с нормальными Hg на пунктах спутниковой сети:
![]()
В эти высоты геоида полностью входит ошибки эллипсоидальной высоты начального пункта GPS-сети, которая может достигать нескольких десятков метров. При правильной передаче координат по пунктам сети эта ошибка будет на всех точках постоянной, а превышения высот геоида ![]() будут иметь высокую точность, что позволяет использовать полученные таким образом данные для изучения фигуры Земли.
будут иметь высокую точность, что позволяет использовать полученные таким образом данные для изучения фигуры Земли.
В геометрическом методе при наличии четырех и более опорных пунктов с известными нормальными (из нивелирования) и эллипсоидальными (по GPS-наблюдениям) высотами образуются разности вида (11.135), для каждой из них может быть составлено выражение вида:
![]()
где x, y – плоские прямоугольные координаты опорных точек в местной системе, A, B, C, D –коэффициенты, определяемые по разностям высот на опорных точках. После определения этих коэффициентов можно вычислить высоту геоида для определяемого пункта по его координатам и перейти к нормальной высоте.
Выражения вида (11.136) называют интерполянтами. Вместо плоских координат x, y можно использовать геодезические координаты B, L. При большем числе опорных пунктов применяются более сложные аппроксимирующие выражения, учитывающие не только наклоны геоида, но и его кривизну. Точность метода определяется плотностью опорных пунктов, степенью аномальности гравитационного поля и видом интерполянта. Достоинством метода является его слабая чувствительность к ошибкам координат начального пункта сети. При расстояниях между опорными пунктами 15 – 20 км в районах средней аномальности ошибка составляет 15 –20 см, в районах повышенной аномальности – 40 – 60 см [Непоклонов и др., 1996].
Кроме непосредственных значений высот, локальная модель должна включать плановые координаты пунктов и ковариационную матрицу ошибок высот. Плановые координаты получают из первичной обработки спутниковых измерений, или из свободного (минимально ограниченного) уравнивания сети. Ковариационная матрица ошибок формируется из ковариационных матриц измерений высот Н и Нg.
Для вычисления в исследуемой точке высоты геоида по локальной модели необходим более сложный аппарат интерполяции, чем для обслуживания региональных моделей, так как высокая точность модельных высот не соответствует плотности сети. При этом в качестве дополнительной информации может быть использована автоковариационная функция высот геоида. В связи с этим различают коррелированные и некоррелированные модели геоидов.
При использовании региональной и локальной моделей геоида одной из проблем является оценка точности нормальной высоты. Ошибки модели могут быть в базе данных, в алгоритме интерполяции, или в ошибочных данных, как и локальные высоты геоида внутри ячейки сетки могут не отражаться в модели. Очевидно, чем ближе две точки одна к другой, тем более вероятно, что ошибки в их геоидальных высотах более коррелированны. Две точки, которые совсем близко одна от другой (скажем, в 1 м), будут иметь коэффициент корреляции 1.0, означающий, что ошибки в их геоидальных высотах совершенно коррелированны. Так же очевидно, что с увеличением расстояния на некотором удалении ошибки в их геоидальных высотах перестанут быть коррелированными, то есть коэффициент корреляции станет равным 0. Это максимальное расстояние называется радиусом корреляции, и обозначается rC .
При моделировании коротковолновых ошибок в модели регионального геоида величина радиуса корреляции будет теоретически зависеть от промежутков в ячейках сетки в базе данных. Радиус корреляции может назначаться пользователем, но по умолчанию он должен устанавливаться равным диагонали между углами сетки. По этому умолчанию все высоты геоида в сети будут иметь корреляции между их ошибками, хотя на точках в противоположных сторонах сетки коэффициент корреляции приближается к нулю. Слишком малый радиус корреляции будет ослаблять корреляцию модели, а большой радиус корреляции может приводить к сингулярной ковариационной матрице. Когда же контрольные точки отстоят дальше, чем теоретический радиус корреляции, это не соответствует корреляциям модели в ошибках высот геоида.
Для пары высот геоида с коррелированными ошибками необходимо определить математическую функцию для вычисления коэффициента корреляции между ними с использованием в качестве аргумента радиуса корреляции и расстояния от точки до точки. Эта функция называется автокорреляционной функцией АКФ. Один из видов АКФ определяется следующим образом:
 .
.
В этом выражении ![]() представляет коэффициент корреляции между ошибками в геоиде на точках А, В, а D – расстояние между точками А, В. Другие члены АКФ могут быть приняты для моделирования поправок в модель геоида. Приведенная здесь АКФ производит простую линейную интерполяцию, как консервативная стратегия, которая не накладывает предположений о преобладающем источнике ошибок в модели геоида. Коэффициент корреляции, который всегда будет между 0 и 1, здесь выражается отношением расстояния между двумя точками и радиуса корреляции.
представляет коэффициент корреляции между ошибками в геоиде на точках А, В, а D – расстояние между точками А, В. Другие члены АКФ могут быть приняты для моделирования поправок в модель геоида. Приведенная здесь АКФ производит простую линейную интерполяцию, как консервативная стратегия, которая не накладывает предположений о преобладающем источнике ошибок в модели геоида. Коэффициент корреляции, который всегда будет между 0 и 1, здесь выражается отношением расстояния между двумя точками и радиуса корреляции.
Прежде чем масштабировать дисперсией модели геоида ![]() , коэффициенты корреляции задают для недиагональных элементов кофакторной матрицы Qz высот геоида, диагональные члены которой устанавливаются равными 1. В результате масштабирования получается ковариационная матрица наблюденных высот геоида Sz.
, коэффициенты корреляции задают для недиагональных элементов кофакторной матрицы Qz высот геоида, диагональные члены которой устанавливаются равными 1. В результате масштабирования получается ковариационная матрица наблюденных высот геоида Sz.
 .
.
По мере накопления информации о геоиде на некоторую территорию в виде локальных моделей они могут по желанию пользователя объединяться в одну региональную модель. В отличие от локальной модели хранить полную ковариационную матрицу всех ошибок геоида региональной модели не представляется возможным. Поэтому такое объединение целесообразно лишь при достижении некоторой однородной плотности пунктов локальных моделей, позволяющей интерполировать высоты без существенной потери точности [TRIMNET, 1991].
4.3 Способы определения аномалий высоты, отклонений отвеса, астрономических координат и азимутов с помощью спутниковых средств измерений и математической модели квазигеоида.
Определение нормальных высот по спутниковым наблюдениям. Передача от начального пункта сети приращений декартовых координат DX, DY, DZ, полученных из обработки GPS-наблюдений базовых линий, позволяет найти координаты всех остальных пунктов в единой системе как в форме прямоугольных координат X, Y, Z, так и в форме геодезических координат B, L, H в системе осей общеземного эллипсоида. Геодезистам и инженерам обычно нужны высоты от уровня моря, в принятой в России Балтийской системе нормальных высот БСВ-77. Связь этих высот с геодезическими высотами в некоторой точке описывается известным соотношением:
![]() , (11.128)
, (11.128)
где Hg - нормальная высота пункта (над поверхностью квазигеоида), а z - высота квазигеоида над эллипсоидом. Предполагается, что высоты H и Hg в уравнении (11.128) действительно имеют геометрическую связь через высоту квазигеоида z, то есть имеют общую систему координат. Если, например, в сети, построенной по спутниковым наблюдениям, геодезические координаты начального пункта были приняты с некоторыми ошибками в системе WGS-84, то высоты всех точек будут иметь дополнительные ошибки. Поэтому в уравнении (11.128) должны появиться члены, вызванные негеоцентричностью локальной системы. Аналогично, если высота z относится, например, к геоиду WGS-84, то в уравнении (11.128) нельзя использовать высоту Н над эллипсоидом Красовского в системе СК-95 (или СК-42). В дальнейшем мы не будем акцентировать внимание на различии в терминах геоид и квазигеоид, полагая, что методика определения этих поверхностей во многом аналогична. Заметим, что на симпозиуме EUREF в Анкаре в мае 1996 г. была принята резолюция № 2 о переходе к системе нормальных высот для Европы (http://www. /html/resolutions. html), однако многие геодезисты продолжают использовать геоид Гаусса-Листинга как основную отсчетную поверхность [Бурша, Юркина, 2005].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
