
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Системы СК-42 и СК-95
Система 1942 года (СК-42) является основной системой координат, принятой для использования в России (и в бывшем Советском Союзе). После 1946 года, когда были приняты параметры нового эллипсоида, более подходящего на территории нашей страны для обработки астрономо-геодезических построений и картографирования, в России была установлена система исходных геодезических дат с началом в пункте Пулково и поверхностью относимости в виде референц-эллипсоида Красовского. Работы по выводу параметров нового референц-эллипсоида велись в течение 10 лет в ЦНИИГАиК под руководством проф. Красовского для вывода параметров эллипсоида были привлечены гравиметрические данные как на территории СССР, так и на зарубежной территории. Данная система получила название «Система 1942 года» (СК-42) [Макаренко и др. 2000].
По теоретическому определению начало системы координат 1942 года (СК-42) близко к центру масс Земли, но не совпадает с ним примерно на 200 м. Ось Z42 параллельна оси Z общеземной системы, ось X42 определяется положением нульпункта принятой системы счета долгот, ось Y42 дополняет систему до правой.
Центр референц-эллипсоида СК-42 совпадает с началом прямоугольной системы координат (X42, Y42, Z42), ось вращения совпадает с осью Z42, плоскость начального меридиана совпадает с плоскостью (XOZ)42.
Линейные и угловые элементы ориентирования задают координаты центра референц-эллипсоида Красовского и ориентировку осей системы 1942 г. в общеземной системе координат. Система была реализована на территории страны системой 87 уравненных полигонов триангуляции 1-го класса, полностью покрывавших Европейскую часть страны и распространявшихся на восток в виде узкой цепочки полигонов. Сеть триангуляции уравнивалась отдельными блоками. На границе блоков результаты предыдущего уравнивания принимались за безошибочные и таким образом координаты постепенно передавались все далее на восток. В каркас полигонов 1-го класса вставлялась заполняющая сеть триангуляции 2-го класса. Такой принцип построения сети привел к неизбежным деформациям сети.
В 1991 г. построенная на территорию страны астрономо-геодезическая сеть (АГС) из 164000 пунктов была уравнена как единое целое. Результаты уравнивание подтвердили наличие значительных деформаций в сети, достигавших на севере и на востоке 20 – 30 метров. Локальные деформации на границах блоков иногда достигали 10 м. Точность взаимного положения пунктов в уравненной сети характеризуется средними квадратическими ошибками в 6, 20, 60 и 200 см при расстояниях соответственно в 10, 100, 1000 и 10000 км.
Проведенное уравнивание АГС показало необходимость в новой системе с однородной точностью координат по всей стране. Для повышения точности было решено использовать результаты высокоточных спутниковых измерений на 26 пунктах Космической геодезической сети (КГС), построенной ВТУ, и 134 пунктах Доплеровской геодезической сети (ДГС), созданной Роскартографией. В качестве дополнительных измерений в общее решение вошли геоцентрические расстояние геодезических пунктов, с использованием гравиметрических высот квазигеоида. Результаты проведенного в 1995 г. совместного уравнивания стали основой системы геодезических координат 1995 г. (СК-95).
Единая государственная система геодезических координат 1995 года получена в результате совместного уравнивания трех самостоятельных, но связанных между собой, геодезических построений различных классов точности: КГС, ДГС, по их состоянию на период 1годов.
Объем измерительной астрономо-геодезической информации, обработанной для введения системы координат 1995 года, превышает на порядок соответствующий объем информации, использованной для установления системы координат 1942 года (СК-42).
Космическая геодезическая сеть предназначена для задания геоцентрической системы координат, доплеровская геодезическая сеть - для распространения геоцентрической системы координат, астрономо-геодезическая сеть - для задания системы геодезических координат и до ведения системы координат до потребителей.
В совместном уравнивании АГС представлена в виде пространственного построения. Высоты пунктов АГС от носительно референц - эллипсоида Красовского определены как сумма их нормальных высот и высот квазигеоида, полученных из астрономо - гравиметрического нивелирования.
В процессе нескольких приближений совместного уравнивания высоты квазигеоида для территории отдаленных восточных регионов дополнительно уточнялись с учетом результатов уравнивания. С целью контроля геоцеитричности системы координат в совместное уравнивание включены независимо определенные геоцентрические радиус-векторы 35 пунктов КГС и ДГС, удаленных один от другого на расстояния около 1000км, для которых высоты квазигеоида над общим земным эллипсоидом получены гравиметрическим методом; а нормальные высоты - из нивелирования.
В результате совместного уравнивания КГС, ДГС, АГС и значений радиус-векторов пунктов построена сеть из 134 опорных пунктов ГГС, покрывающая всю территорию при среднем расстоянии между смежными пунктами 400...500 км.
Точность определения взаимного положения этих пунктов по каждой из трех, пространственных координат характеризуется средними квадратическими ошибками 0,25...0,80 м при расстояниях от 500 до 9000 км.
Абсолютные ошибки отнесения положений пунктов к центру масс Земли не превышают 1 м по каждой из трех осей пространственных координат.
Эти пункты использовались в качестве исходных при заключительном общем уравнивании АГС.
Точность определения взаимного планового положения пунктов, полученная в результате заключительного уравнивания АГС по состоянию на 1995 год, характеризуется средними квадратическими ошибками: 0,02...0,04 м для смежных пунктов, 0,25...0,80 м при расстояниях от 1 до 9 тыс. км.
Между единой государственной системой геодезических координат 1995 года (СК-95) и единой государственной геоцентрической системой координат “Параметры Земли 1990 года” (ПЗ-90) установлена связь, определяемая параметрами взаимного перехода (элементами ориентирования). Направления координатных осей Х, У,2 используемой геоцентрической системы координат определены координатами пунктов КГС; начало координат этой системы установлено под условием совмещения с центром масс Земли.
За отсчетную поверхность в государственной геоцентрической системе координат (ПЗ-90) принят общий земной эллипсоид со следующими геометрическими параметрами:
• большая полуось 6м;
• сжатие 1:298,257839.
Центр этого эллипсоида совмещен с началом геоцентрической системы координат; плоскость начального (нулевого) меридиана совпадает с плоскостью ХZ этой системы.
Геометрические параметры общего земного эллипсоида приняты равными соответствующим параметрам уровенного эллипсоида вращения. При этом за уровенный эллипсоид вращения принята внешняя поверхность нормальной Земли, масса и угловая скорость вращения которой задаются равными массе и угловой скорости вращения Земли.
Масса Земли М , включая массу ее атмосферы, умноженная на постоянную тяготения f, составляет геоцентрическую гравитационную постоянную fМ = х 107 м 3/с 2, угловая скорость вращения Земли w принята равной 7292115 х1011 рад/с, гармонический коэффициент геопотенциала второй степени J2, определяющий сжатие общего земного эллипсоида, принят равным 108263х108.
Система координат 1995 года установлена так, что ее оси параллельны осям геоцентрической системы координат. Положение начала СК-95 задано таким образом, что значения координат пункта ГГС Пулково в системах СК-95 и СК-42 совпадают.
Переход от геоцентрической системы координат к СК-95 выполняется по формулам:
XСК-95= XПЗ-90- ДX0
YСК-95= YПЗ-90- ДY0
ZСК-95= ZПЗ-90- ДZ0
где ДХ0, ДУ0, ДZ0 - линейные элементы ориентирования., задающие координаты начала системы координат 1995 года относительно геоцентрической системы координат ПЗ-90, составляют ДХо = +25,90 м; ДУ0 = -130,94 м, ДЖо = -81,76 м.
За отсчетную поверхность в СК-95 принят эллипсоид Красовского с параметрами:
• большая полуось 6м;
• сжатие 1: 298,3.
Малая полуось эллипсоида совпадает с осью 7, остальные оси системы координат СК-95 лежат в его экваториальной плоскости, при этом плоскость начального (нулевого) меридиана совпадает с плоскостью ХЖ этой системы.
Положение пунктов ГГС в принятых системах задается следующими координатами:
• пространственными прямоугольными координата ми X, У, Z ;
• геодезическими (эллипсоидальными) координата ми В, L, Н;
• плоскими прямоугольными координатами х и у, вычисляемыми в проекции Гаусса-Крюгера.
При решении специальных задач могут применяться и другие проекции эллипсоида на плоскость.
Геодезические высоты пунктов ГГС определяют как сумму нормальной высоты и высоты квазигеоида над отсчетным эллипсоидом или непосредственно методами космической геодезии, или путем привязки к пунктам с известными геоцентрическими координатами.
Нормальные высоты пунктов ГГС определяются в Балтийской системе высот 1977 года, исходным началом которой является нуль Кронштадтского футштока.
Карты высот квазигеоида над общим земным эллипсоидом и референц - эллипсоидом Красовского на территории Российской Федерации издаются Федеральной службой геодезии и картографии России и Топографической службой ВС РФ.
Масштаб ГТС задается Единым государственным эталоном времени-частоты-длины. Длина метра принимается в соответствии с резолюцией MAS Генеральной конференции по мерам к весам (октябрь 1983 г.) как расстояние, проходимое светом в вакууме за 1:ую долю секунды.
В работах по развитию ГГС используются шкалы атомного ТА (813) и координированного UTC (SU) времени, задаваемые существующей эталонной базой Российской Федерации, а 1-акже параметры вращения Земли и поправки для перехода к международным шкалам времени, периодически публикуемые Госстандартом России в специальных бюллетенях Государственной службы времени и частоты (ГСВЧ).
Астрономические широты и долготы, астрономические и геодезические азимуты, определяемые по наблюдениям звезд, приводятся к системе фундаментального звездного каталога, к системе среднего полюса и к системе астрономических долгот, принятых на эпоху уравнивания ГГС.
Метрологическое обеспечение геодезических работ осуществляется в соответствии с требованиями государственной системы обеспечения единства измерений.
Типы средств измерений, применяемые при создании ГГС, включая импортируемые., должны быть утверждены, а средства измерений при выпуске из производства, после ремонта и в процессе эксплуатации должны проходить поверку в соответствии с Федеральным законом “Об обеспечении единства измерений” -1 (с изменениями).
5.3 Преобразование координат по методу Гельмерта и Молоденского
Геодезисту, занимающемуся спутниковыми технологиями, приходится сталкиваться с двумя видами координатных преобразований:
· - использование опубликованных параметров преобразования,
· - преобразование через определение соответствующих параметров.
Иногда эти два вида преобразований называют соответственно глобальным и локальным преобразованиями, и, соответственно, параметры преобразования называют глобальными (иногда национальными, для отдельной страны) и локальными параметрами. В данном разделе будет рассмотрен первый вид преобразований. Второй вид будет рассмотрен в главе 11 как один из методов уравнивания спутниковых сетей с ограничениями.
Используемые в современных методах построения сетей преобразования координат и высот можно свести в схему (рис. 2.12) [Rizos, 1999].
Возможные координатные преобразования при объединении классических и спутниковых методов построения сетей.
Преобразование компонент вектора  из системы СК1 в систему СК2 в общем случае сводится к трем операциям: переносу, повороту и масштабированию. В частном случае любая из операций может применяться самостоятельно или в комбинации с любой другой.
из системы СК1 в систему СК2 в общем случае сводится к трем операциям: переносу, повороту и масштабированию. В частном случае любая из операций может применяться самостоятельно или в комбинации с любой другой.
Операция переноса заключается в добавлении к вектору ![]() вектора
вектора ![]() начала координат системы СК1 в системе СК2:
начала координат системы СК1 в системе СК2:
![]() . (2.80)
. (2.80)
Преобразование координат вектора операцией поворота производится после совмещения начал координатных систем и записывается уравнением:
![]() , (2.81)
, (2.81)
где R - матрица поворота размера 3´3. Ее элементы являются косинусами углов между «новыми» и «старыми» осями, то есть
 . (2.82)
. (2.82)
Частными случаями матрицы R являются матрицы вращения вокруг одной из осей. Для таких случаев используется уравнение:
![]() , (2.83)
, (2.83)
где a - угол вращения, а i - номер оси, вокруг которой производится вращение. Если вращение происходит вокруг оси x, то i = 1, а матрица ![]() имеет вид:
имеет вид:
 . (2.84)
. (2.84)
При поворотах вокруг второй и третьей оси соответственно на углы b и g имеем:
 , (2.85)
, (2.85)
 . (2.86)
. (2.86)
Очень часто поворот разбивают на три вращения либо с использованием углов Эйлера (рис. 2.13), либо углов Кардано (рис. 2.14). На рис. 2.13 основные плоскости систем СК1 и СК2 пересекаются по линии ![]() . Угол W между осью XCK1 и линией
. Угол W между осью XCK1 и линией ![]() называется углом прецессии, угол i между основными плоскостями - углом нутации, и угол w между линией
называется углом прецессии, угол i между основными плоскостями - углом нутации, и угол w между линией ![]() и осью XCK2 называется углом чистого вращения. Преобразование с применением углов Эйлера записывается в виде:
и осью XCK2 называется углом чистого вращения. Преобразование с применением углов Эйлера записывается в виде:
![]() . (2.87)
. (2.87)
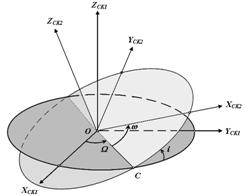

Рис. 2.13. Углы Эйлера. Рис. 2.14. Углы Кардано.
Преобразование с углами Кардано wX, wY, wZ, образующими вектор малого вращения ![]() , при котором производится три последовательных вращения. На рис. 2.14 показано, что первое вращение производится вокруг оси ZCK1 на угол wZ против часовой стрелки. В результате этого вращения ось XCK1 оказывается в положении X¢, а ось YCK1 – в положении Y¢. Второе вращение производится вокруг оси X¢ на угол wX, в результате чего ось Y¢ оказывается в положении YCK2, а ось ZCK1 – в положении Z². Наконец, третье вращение производится вокруг оси YCK2 на угол wY, после которого ось Z² оказывается в положении ZCK2, а ось X¢ – в положении XCK2. Все три вращения записываются в виде произведения
, при котором производится три последовательных вращения. На рис. 2.14 показано, что первое вращение производится вокруг оси ZCK1 на угол wZ против часовой стрелки. В результате этого вращения ось XCK1 оказывается в положении X¢, а ось YCK1 – в положении Y¢. Второе вращение производится вокруг оси X¢ на угол wX, в результате чего ось Y¢ оказывается в положении YCK2, а ось ZCK1 – в положении Z². Наконец, третье вращение производится вокруг оси YCK2 на угол wY, после которого ось Z² оказывается в положении ZCK2, а ось X¢ – в положении XCK2. Все три вращения записываются в виде произведения
![]() . (2.88)
. (2.88)
Метод Гельмерта
При малых углах вращения wX, wY, wZ после разложения тригонометрических функций в ряд Тейлора с удержанием членов первого порядка и перемножения матриц получаем:
 . (2.89)
. (2.89)
Операция масштабирования при трансформировании координат заключается изменении длины одинаково во всех направлениях с помощью малого скаляра m, характеризующего отличие от единицы отношения одного и того же элемента длины в разных системах (преобразование подобия):
![]() , (2.90)
, (2.90)
Обычно m <10-6 и дается в единицах 6-го или 9-го знака.
Часто встречающееся в космической геодезии преобразование прямоугольных координат с использованием операций переноса, поворота на углы Кардано и масштабирования записывается следующим образом:
![]() , (2.91)
, (2.91)
или
 . (2.92)
. (2.92)
Этот вид преобразований нередко называют преобразованием по Гельмерту, или 7-параметрическим преобразованием, или Евклидовым преобразованием подобия, а входящие в него параметры трансформирования (векторы T и w и скаляр m) - параметрами Гельмерта.
В таблице 2.4 приводятся параметры связи для некоторых систем, в некоторых случаях знаки параметров, взятых из публикаций, приведены в соответствие с формулой (2.92).
Связь геодезических координат (Метод Молоденского)
Очень часто используется преобразование, при котором геодезические координаты B, L, H в системе СК2 получаются через координаты в системе СК1, минуя переход к прямоугольным координатам:
 . (2.93)
. (2.93)
Поправки DB, DL, DH являются не только функциями параметров связи координатных систем, но также зависят от изменения размеров и формы референц-эллипсоидов, и, следовательно, должны содержать девять параметров. Вероятно, первое появление в печати данных формул было сделано в Трудах ЦНИИГАиК, вып. 131, , и [Молоденский и др., 1961]. Однако в них не учитывалось изменение масштаба, то есть они аналогичны шести-параметрическому преобразованию по Гельмерту. В зарубежной литературе это преобразование называется как «метод Молоденского», например [Botton et al., 1997; Harvey, 1986], или «стандартные формулы Молоденского» [DMA, 1991]. Полные формулы преобразования имеют вид [Герасимов, 1996]:
 (2.94)
(2.94)
 (2.95)
(2.95)
 (2.96)
(2.96)
Здесь
![]() , (2.97)
, (2.97)
![]() , (2.98)
, (2.98)
![]() , (2.99)
, (2.99)
 . (2.100)
. (2.100)
Глобальные методы преобразования координат обеспечивают высокую точность при работе с точными координатными системами, например ITRF. При трансформировании локальных референцных координат ошибки могут значительно возрастать из-за того, что параметры связи координатных систем во многих случаях определяются по ограниченной выборке точек и не могут учитывать локальных нелинейных искажений в сетях. Например, точность перехода из системы ПЗ-90 в СК-42 оценивается в 2 - 4 м [Основные положения, 1997], а из WGS-84 в СК-42 - в 5 - 7 м [Бойков и др., 1993]. Следует также иметь в виду, что с появлением новых реализаций координатных систем повышается точность глобальных методов трансформирования.
Для преобразования координат в локальных областях пользуются методами, в которых переход от одной системы в другую осуществляется по тем же алгоритмам, какие используются в глобальных методах, но параметры перехода или часть из них определяются по измерениям на опорных точках в рассматриваемой области [Галазин и др., 1997].
5.4. Уравнивание спутниковых и традиционных геодезических сетей
5.4.1 Концепции уравнивания.
В общем случае кампания GPS измерений включает использование небольшого числа приёмников для определения координат большого количества станций. Выполненные в проекте наблюдения разделяются на сессии, состоящие из наблюдений на отдельных станциях (пунктах). Сессия может быть короткой, всего несколько минут, если в малой сети применяется метод быстрого разрешения неоднозначностей, или несколько часов и даже суток, если необходимо достигать высокую точность в более крупных сетях. При ограниченном числе доступных спутников типичная сессия наблюдения в инженерных сетях продолжается от 1 до 3 часов. Разработаны и используются следующие методики уравнивания спутниковых наблюдений:
· уравнивание наблюдений, выполненных на одной станции;
· обработка одной базовой линии и последующее объединение базовых линий в сеть,
· объединенное уравнивание всех полученных наблюдений отдельной сессии (уравнивание наблюдений многих станций одной сеансов), и
· объединение решений многих сеансов в строгое всеобщее сетевое решение.
Уравнивание одной станции (позиционирование точки, «однопунктовое» решение) обеспечивает абсолютные координаты станции в системе WGS-84 (или ПЗ-90). Если обрабатываются только кодовые измерения, то из-за низкой точности эти результаты обычно представляют малый интерес для геодезических применений, но они часто отвечают требованиям некоторых задач геофизики, ГИС и дистанционного зондирования. Типичная область этого применения – навигация.
В строгом геодезическом уравнивании необходима информация и об относительном, и об абсолютном положении пункта. Поэтому решение по одной станции во многих программных пакетах включается для совместной обработки многих станций. Решение по одной станции также используется для предварительной обработки и редактирования данных (например, из-за потерь счета циклов, вращения Земли, эффектов теории относительности, ионосферы, тропосферы и для образования нормальных мест). Более точные абсолютные положения, на уровне несколько метров или лучше можно достигнуть, если используются данные нескольких суток наблюдений. Сантиметровый уровень точности возможен при абсолютном позиционировании по фазе несущей.
Концепция одинарной базовой линии очень широко используется в программном обеспечении для обработки спутниковых данных. В совместном уравнивании обрабатываются наблюдения от двух одновременно работавших приемников, преимущественно в виде двойных разностей. Результатом являются компоненты ![]() вектора базовой линии и соответствующая ковариационная матрица KXYZ.
вектора базовой линии и соответствующая ковариационная матрица KXYZ.
Отдельные базовые линии используются как исходные данные в программе уравнивания сети. Обработка наблюдений в сети распадается на первичное уравнивание (решение базовых линий) и вторичное уравнивание (уравнивание векторов базовых линий). Эта методика является строгой, если одновременно наблюдали только два приемника, и если используется вся стохастическая информация полной ковариационной матрицы. Однако если пары станций выбраны из большего числа одновременно действовавших приемников, то не все возможные комбинации базовых линий не зависят одна от другой. Как было показано в разделе 10.2.4, при одновременных наблюдениях R приемниками получается R(R-1)/2 возможных базовых линий, но независимыми из них являются только R-1 линий. Если имеющееся программное обеспечение может обрабатывать только по одной базовой линии, то независимые, «не тривиальные» базовые лини должны выявляться с использованием подходящих критериев отбора, таких как длина базовой линии или число наблюдений. Тем не менее, эта методика не является строгой для сетевых решений, поскольку не учитывается стохастическая информация между одновременно наблюдавшимися линиями. Для улучшения решения необходимо тщательное взвешивание и ослабление корреляции.
Большинство производителей предлагают вместе с приемниками программы, которые используют концепцию базовых линий. Эти программы удобны для малых проектов, для полевой проверки данных и для применений в реальном времени.
В уравнивании многих станций одной сессии совместно обрабатываются все данные, которые наблюдались одновременно тремя или более участвующими приемниками. В этом случае результатами решения являются R-1 независимых векторов и ковариационная матрица размера 3(R-1)´ 3(R-1). В зависимости от имеющегося программного обеспечения, результаты можно также выдавать набором из 3R координат и ковариационной матрицы размером 3R´3R. Ковариационная матрица также является блочно-диагональной, в которой размер ненулевых диагональных блоков является функцией числа приемников R. Следовательно, это строгое уравнивание наблюдений с использованием всех взаимных стохастических соотношений. Для геодезических целей такое «многопунктовое» уравнивание имеет концептуальные преимущества над методом базовых линий, поскольку используется весь потенциал точности СРНС.
Несколько решений по сессиям можно объединять в уравнивание многих сессий или, более точно, в решение по многим станциям и многим сессиям. Это обычная методика, когда крупные сети разбиваются на части из-за ограниченного числа приемников. Основное условие в таком уравнивании состоит в том, что каждая сессия связывается хотя бы с одной другой сессией через одну или большее количество общих станций, на которых наблюдения выполнялись в обе сессии. Расширение числа общих станций повышает стабильность и надежность всей сети.
Заключительная часть уравнивания спутниковой сети заключается в ее объединении с традиционной ГГС и переводе координат в государственную референцную систему координат СК-95 и систему высот БСВ-77.
5.4.2 Свободное, минимально ограниченное и ограниченное уравнивание
Из приведенных в разделе замечаний следует, что для средней кампании есть два вида уравнивания: первичное уравнивание, в результате выполнения которого находятся векторы базовых линий и соответствующие ковариационные матрицы, и вторичное уравнивание, которое рассматривает выход первичного уравнивания как наблюдение.
Уравнивание геодезических сетей, построенных с применением спутниковых технологий, является необходимым этапом технологии геодезических работ. Задачами уравнивания является:
· согласование совокупности всех измерений в сети,
· минимизация и фильтрация случайных ошибок измерений,
· выявление и отбраковка грубых измерений, исключение систематических ошибок,
· получение набора уравненных координат и соответствующих им элементов базовых линий с оценкой точности в виде ошибок или ковариационных матриц,
· трансформирование координат в требуемую координатную систему,
· преобразование геодезических высот в нормальные высоты над квазигеоидом.
Таким образом, главная цель уравнивания – повышение точности и представление результатов в необходимой системе координат с оценкой точности. Для достижения этих целей используются известные теоретические и практические методы, имеющие достоверное статистическое обоснование.
Обработка некоторой базовой линии АВ дает в результате вектор между двумя станциями с компонентами в виде разностей координат ![]() , которые рассматриваются теперь как результаты измерений. Им соответствует ковариационная матрица
, которые рассматриваются теперь как результаты измерений. Им соответствует ковариационная матрица  размера 3´3. Полная ковариационная матрица для сети является блочно-диагональной, с подматрицами размера 3´3 на главной диагонали. В такой форме результаты измерений получаются, если работали только два приемника. Если совместно обрабатывались результаты сессии из R приемников и получено R-1 независимых базовых линий, то им соответствует полная ковариационная матрица размера 3(R-1)´3(R-1).
размера 3´3. Полная ковариационная матрица для сети является блочно-диагональной, с подматрицами размера 3´3 на главной диагонали. В такой форме результаты измерений получаются, если работали только два приемника. Если совместно обрабатывались результаты сессии из R приемников и получено R-1 независимых базовых линий, то им соответствует полная ковариационная матрица размера 3(R-1)´3(R-1).
Дополнительными исходными данными для уравнивания СГС являются:
· координаты опорных пунктов в геоцентрической системе WGS-84, ПЗ-90 или ITRF с необходимой точностью,
· координаты (плановые и высотные) опорных пунктов в новой системе при переводе пространственных координат.
Различают свободное, минимально ограниченное и ограниченное (несвободное) уравнивание. В свободном уравнивании неизвестными считаются все пункты сети, и положение сети относительно геоцентра известно с той же точностью, что координаты начальной точки сети. В этом случае матрица коэффициентов системы уравнений поправок (матрица плана) и, следовательно, нормальная матрица будет иметь дефект ранга, равный трем. Однако использование аппарата псевдообращения матриц, применяемого в некоторых программах, позволяет провести уравнивание. При фиксировании координат одного пункта получаем минимально ограниченное уравнивание, в котором нормальная матрица оказывается невырожденной. Для достижения значимого контроля векторная сеть не должна содержать векторы, концы которых не связаны, по крайней мере, с двумя станциями. При фиксировании более чем трех координат, будет ограниченное уравнивание в том смысле, что будут наложены дополнительные ограничения по отношению к минимально необходимым. Свободное и минимально ограниченное уравнивание применяются для решения первых трех задач, перечисленных в начале раздела. Его результаты отражают внутреннюю точность сети, не деформированной ошибками исходных данных. Ограниченное уравнивание выполняется после успешного выполнения минимально ограниченного уравнивания для включения вновь построенной сети в существующую сеть, в ее координатную систему, в том числе систему высот. Для этого новая сеть должна быть связана, по крайней мере, с двумя станциями существующей сети.
При уравнивании сети можно оценить качество наблюдений выведенных векторов базовых линий, выполнить вычисления внутренней и внешней надежности, можно выявить и удалить грубые ошибки. Например, ошибка в высоте антенны не будет обнаружена при обработке базовых линий одна за другой, но будет обнаружена при уравнивании сети. Методику последовательного уравнивания, если необходимо, можно также использовать для уравнивания компонент сети. При свободном или минимально ограниченном уравнивании можно произвести передачу дисперсий для вычисленных расстояний, углов или любых других функций координат.
Особая проблема, - это совместное уравнивание спутниковых и обычных геодезических измерений. Суть ее в том, что классические геодезические измерения (измерения углов, нивелировки, астрономические определения и др.) выполняются с использованием уровня, то есть в качестве опорной поверхности используется геоид. Измерения базовых линий производятся в системе осей общеземного эллипсоида. Для корректного приведения данных к одной какой-либо системе необходимо знать высоты геоида над эллипсоидом с соответствующей точностью.
Уравнивание небольших сетей выполняется обычно по программам, входящим в состав фирменного коммерческого обеспечения. Примером таких программ может служить модуль TRIMNET Plus, входивший в состав программ GPSurvey и в несколько измененном виде вошедший в пакет Trimble Geomatics Office американской фирмы Trimble Navigation и др.
5.5. Функциональные и стохастические модели наблюдений
5.5.1 Функциональные модели уравнивания
Уравнение связи или математическая модель уравнивания спутниковой геодезической сети (СГС) определяет соотношение между измеренными величинами (компонентами вектора базовой линии) и параметрами сети, в качестве которых здесь выступают координаты пункта наблюдений.
Уравнивание СГС можно производить в прямоугольных пространственных координатах X, Y, Z, в геодезических координатах B, L, H на эллипсоиде, или в плоских координатах в некоторой проекции.
Уравнивание в прямоугольной системе координат. Если уравнивание производится в прямоугольных пространственных координатах параметрическим методом, то математической моделью измерений является обычная модель уравнений наблюдений:
![]() , (11.60)
, (11.60)
где ![]() - уравненный вектор наблюдений, а
- уравненный вектор наблюдений, а  - уравненные координаты станций. Такая математическая модель от природы линейна. Вектор наблюдений между станциями А и В записывается как
- уравненные координаты станций. Такая математическая модель от природы линейна. Вектор наблюдений между станциями А и В записывается как
 . (11.61)
. (11.61)
Выразим координаты станций через их предварительные (априорные) значения ![]() и поправки к ним
и поправки к ним  :
:
![]() , (11.62)
, (11.62)
Теперь уравнение поправок для одной базовой линии можно записать в виде:
![]() , (11.63)
, (11.63)
или
![]() , (11.64)
, (11.64)
где ![]() - вектор поправок (матрица-столбец) в измеренные компоненты вектора базовой линии
- вектор поправок (матрица-столбец) в измеренные компоненты вектора базовой линии ![]() :
:
![]() , (11.65)
, (11.65)
а ![]() - свободный член, определяемый выражением:
- свободный член, определяемый выражением:
![]() . (11.66)
. (11.66)
Система уравнений поправок для всей сети записывается в виде:
![]() . (11.67)
. (11.67)
Матрица коэффициентов А для модели (11.67) состоит из 1, -1 и 0, ее фрагмент для линии AB выглядит следующим образом:
 . (11.68)
. (11.68)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
