
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
после обязательного для перехода на режим самовращения на любом вертолете уменьшения общего шага НВ до минимального возникает значительный пикирующий момент, создаваемый НВ и корпусом. Если пилот не вмешивается в продольное управление, продольная разбалансировка вертолета приведет через 2...3 с к увеличению угла тангажа на пикирование до 30...40°;
при планировании на режиме самовращения НВ с положительным углом атаки и минимальным общим шагом вертолет статически нейтрален или даже неустойчив по скорости. При этом минимальный запас продольного управления «на себя» соответствует максимально допустимой скорости планирования с предельно передней центровкой (для одновинтового вертолета — режиму висения с ветром сзади), а при невмешательстве в управление возникает опасность затягивания вертолета в пикирование;
путевая управляемость существенно хуже, чем на моторных режимах горизонтального полета и чем на режиме самовращения НВ одновинтового вертолета, поэтому для выдерживания заданного направления планирования и захода на посадку требуется значительный расход и перекладка педалей, а при посадке с боковым ветром может не хватить запаса путевого управления;
с целью повышения эффективности и запасов путевого управления целесообразно выполнять безмоторное планирование на скорости не менее 100 км/ч с общим шагом З...6° и соответственно' пониженной по сравнению с моторными режимами частотой вращения НВ, что способствует также уменьшению вертикальной скорости снижения;
в случае исчерпания запаса путевого управления при заходе на посадку с достаточно сильным боковым ветром следует использовать ручку управления, отклоняя ее в поперечной плоскости для создания необходимого угла скольжения вертолета;
благодаря малым габаритным размерам вертолета в продольной плоскости и отсутствию РВ выравнивание на малой высоте перед приземлением можно выполнять с углами тангажа примерно на 10° большими, чем для сопоставимого одновинтового вертолета.
В целом выполнение вынужденной посадки с выключенными двигателями представляет собой весьма сложную задачу, требующую высокого летного мастерства и хладнокровия командира вертолета. Даже незначительные нарушения изложенных рекомендаций по технике пилотирования приводят к переходу данной аварийной ситуации в катастрофическую. Поэтому летный тренаж посадки с выключенными двигателями в настоящее время проводится только пилотами-испытателями с целью оценки авторотационного качества вертолета и разработки соответствующего раздела руководства по летной эксплуатации.
Вместе с тем при обучении и подготовке летного состава предусмотрено выполнение с учебной целью специального упражнения.
Снижение на режиме условного самовращения НВ выполняется следующим образом:
при достаточном запасе высоты в горизонтальном полете устанавливают скорость, близкую к наивыгоднейшей;
отклоняют рычаг «шаг—газ» вниз до упора или до положения, при котором крутящие моменты двигателей будут не менее заданных (5...10%); . ,'
.рукоятку коррекции (если она есть) поворачивают влево, при этом регуляторы частоты вращения НВ выключаются из работы;
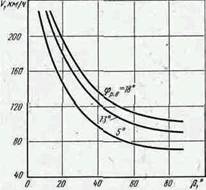
изменением положения рычага «шаг—газ» сохраняют заданную частоту вращения НВ, зависящую от полетной массы вертолета, высоты полета и температуры наружного воздуха (рис. 4.9);
тенденцию вертолета к развороту вправо и пикированию пари1 руют соответствующими отклонениями ручки управления и педалей; •
вывод из режима самовращения осуществляют плавным переводом рукоятки коррекции вправо и отклонением вверх рычага «шаг—газ» с темпом, обеспечивающим сохранение заданной частоты вращения НВ.
При положении рычага «шаг—газ» на нижнем упоре и рукоятки коррекции в крайнем левом положении мощность полностью задрос-
селированных двигателей столь мала (7...9 % на малоразмерных двигателях типов ГТД-350 ТВ2-117, ТВЗ-117 и 4...6 % на двигателях типов Д-25В, Д-136), что не оказывает заметного влияния на вращение НВ, поддерживаемое главным образом энергией набегающего при снижении вертолета воздушного потока. Поэтому выполнение указанным образом снижения на режиме самовращения НВ с задросселирован-ными двигателями позволяет отработать правильные навыки техники пилотирования вертолета в ОС, вызванной выключением двух двигателей в полете.
Однако, к сожалению, отработка техники пилотирования при выполнении вынужденной посадки с задросселированными двигателями не представляется возможной по следующим причинам:
при «подрыве» общего шага НВ перед приземлением вертолета-с выключенными двигателями динамическое приращение тяги создается только за счет кинетической энергии вращения НВ, вращающий момент двигателей неизменно равен нулю;
при «подрыве» общего шага НВ на вертолете с работающими двигателями их мощность возрастает по закону приемистости от минимальной до взлетной, а частота вращения затяжеляемого НВ уменьшается за время «подрыва» почти так же, как и при выключенных двигателях;
в результате к моменту окончания «подрыва» общего шага НВ, когда вертолет уже приземлится, двигатели выйдут на околовзлетную мощность^ а частота вращения НВ уменьшится почти вдвое;
вследствие резкого возрастания передаваемой мощности и уменьшения частоты вращения агрегаты несущей системы и трансмиссии подвергаются воздействию нерасчетных динамических нагрузок от крутящего момента;
если не придать должного значения изложенным обстоятельствам и не отстранить от эксплуатации динамически нагруженные вращающиеся агрегаты, в последующих полетах возможно их разрушение в пределах установленного'ресурса.
Поэтому обучение летного состава выполнению вынужденной посадки с выключенными двигателями целесообразно осуществлять, главным образом, с помощью пилотажных тренажеров.
4.3. ОТКАЗЫ ТРАНСМИССИИ
Характерные отказы главного редуктора, создающие ОС:
усталостные разрушения шариковых и роликовых подшипников опор ведущего и ведомого валов, муфт свободного хода, а также опор различных шестерен;
усталостные разрушения спирально-конических зубчатых колес, колокольной шестерни, сателлитов механизма редуктора;
разрушение узла привода вентилятора;
разрушение муфты соединения трансмиссии двигателя с главным редуктором; . ' _
неисправность термоклапана маслорадиатора.
Последствия указанных отказов:
разрушения опорно-упорных подшипников сопровождаются нарушением расчетных условий зацепления шестерен, возможным разрушением корпуса редуктора и возникновением пожара на вертолете;
разрушения шестерен приводят к заклиниванию или, наоборот, расцеплению механизма редукции;
разрушение привода вентилятора вызывает повышенную тряску конструкции вертолета и перегрев главного редуктора вследствие прекращения его обдува вентилятором;
разрушение муфты соединения трансмиссии двигателя с главным редуктором приводит к рассоединению кинематической связи двигателя с НВ;
при расцеплении механизма редукции, сопровождаемом раскруткой ротора свободной турбины, система защиты турбины винта от раскрутки автоматически выключает двигатель (двигатели);
неисправность термоклапана масляного радиатора сопровождается повышением температуры масла в редукторе.
Рекомендуемые действия пилота: ' [
немедленно перейти на планирование с наивыгоднейшей скоростью и соответственно минимальной потребной мощностью дви-'гателей; ' '
произвести посадку на выбранную площадку, по возможности по-самолетному, не допуская продолжительности планирования и подбора площадки с воздуха более 10 мин;
если при загорании сигнальных табло температуры, давления масла и стружки в редукторе стрелочные индикаторы давления и температуры масла не подтверждают выход указанных параметров за допустимые пределы, прекратить выполнение полетного задания и следовать до ближайшего аэродрома, усилив контроль за параметрами работы главного редуктора и силовой установки.
Основное средство инструментального контроля технического состояния главного редуктора — фильтр-сигнализатор стружки, который относится к, системе раннего обнаружения разрушения механизма редуктора и вступает в работу до появления других диагности-
200
ческих признаков (температуры и давления масла; уровня вибраций и шума).
Однако применяемый в настоящее время фильтр-сигнализатор типа ФСС-1 имеет повышенную чувствительность к наличию металлических частиц в масле, обусловленному недостаточно тщательной фильтрацией масла при заправке и естественным износом трущихся поверхностей механизма редуктора. Поэтому в эксплуатации отме - • чаются достаточно частые случаи ложного срабатывания фильтра-сигнализатора. Это неблагоприятное обстоятельство притупляет бдительность летных экипажей, которые могут перестать должным образом реагировать на загорание сигнального табло «Стружка в масле главного редуктора» или даже вообще отключить данную систему сигнализации, чтобы она не «мешала» в полете. Последствия таких необдуманных действий могут быть трагичными.
Действительно, процесс разрушения механизма редуктора носит, как правило, лавинообразный характер, время от начала разруше - ' ния, идентифицируемого по появлению металлической стружки, до заклинивания механизма редуктора может составить всего несколько минут. Кроме того, вследствие достаточно большого объема масло-системы главного редуктора увеличение температуры и уменьшение давления масла происходят с определенным запаздыванием от начала разрушения.
Поэтому при срабатывании сигнализатора «Стружка в масле главного редуктора» необходимо немедленно прекратить выполнение полетного задания и заходить на вынужденную посадку, не ожидая появления других диагностических признаков отказа главного редуктора и не предаваясь сомнениям относительно исправности сигнализатора стружки. Даже если эта вынужденная посадка окажется напрасной, цена ее, очевидно, несопоставима с ценой воз - • можной потери вертолета и его экипажа.
Важным в аспекте обеспечения безопасности полетов механическим элементом трансмиссии вертолета являются муфты свобод - 1 ного хода, которые конструктивно входят в состав главного редуктора и соединяют входные быстроходные валы с первой ступенью механизма редукции. Основное назначение этих муфт на вертолете — автоматическое отсоединение вала отказавшего двигателя от главного редуктора и обеспечение полета с одним работающим двигателем или на режиме самовращения НВ. Однако вследствие недостаточной иногда эксплуатационной надежности самих муфт сво - ' бедного хода создаются достаточно опасные ОС. ,
Отказы роликовых муфт свободного хода заключаются в проскальзывании звездочки относительно обоймы в направлении пере-' дачи вращающего момента двигателей и проявляются в различных формах, характеризующихся как «невключение», «ударное заклинивание», «расцепление» и «буксование». Эти отказы вызывают нарушение нормального процесса передачи мощности двигателя на НВ и раскрутку ротора свободной турбины, которая может завершиться
201
автоматическим выключением двигателя системой защиты турбины винта от раскрутки.
Отказы муфт свободного хода возникают преимущественно на переходных режимах работы двигателей, как правило, внезапно, им не предшествуют заметные отклонения в характере работы силовой установки. На этапах запуска и опробования двигателей такие отказы приводят к отстранению вертолета от вылета обычно без опасных последствий. В полете отказ муфты свободного хода представляет собой, как правило, последовательность отказных состояний «расцепление — ударное заклинивание — буксование» и характеризуется следующими признаками:
удары и скрежет в зоне главного редуктора и двигателей;
рывки лопастей НВ;
подергивания вертолета и колебания стрелок приборов;
уменьшение частоты вращения НВ;
значительное увеличение частоты вращения свободной турбины одного из двигателей; '
самопроизвольное изменение «вилки» в частоте вращения левого и правого двигателей; . ,
разбалансировка вертолета по направлению и крену.
При появлении хотя бы части перечисленных признаков экипаж должен прекратить выполнение полетного задания и возвращаться на свой аэродром или производить вынужденную посадку.
В наиболее неблагоприятных случаях рассматриваемая особая ситуация завершается автоматическим выключением одного из двигателей системой защиты турбины винта от раскрутки, возникновением пожара на вертолете, разрушением корпуса главного редуктора и кратковременным заклиниванием трансмиссии при ударном включении МСХ. Действия экипажа в. этих случаях достаточно очевидны.
Характерные отказы хвостовой трансмиссии, приводящие к ее рассоединению и потере путевой управляемости вертолета одновинтовой схемы, обусловлены разрушениями: зубьев ведущей шестерни хвостового и промежуточного редукторов; подшипников опор ведущей и ведомой шестерен хвостового и промежуточного редукторов, штока хвостового редуктора, опор хвостового вала; шлицевого стакана звездочки хвостового редуктора; шлицевых муфт хвостового вала. .
На вертолетах типов Ми-2, Ми-8, Ми-17 единственным средством инструментального контроля технического состояния хвостовой трансмиссии является указатель температуры масла в хвостовом и промежуточном редукторах. Однако в условиях применяемой барботажной смазки локальный разогрев разрушающегося узла не всегда приводит к быстрому и значительному повышению общей температуры масла в картере. Кроме того, при недозаправке редуктора масло соприкасается не со всеми разогревающимися деталями. • 202 . •
На вертолетах типов Ми-6, Ми-26 имеются, кроме того, указатели' давления масла в хвостовом и промежуточном редукторах, а на вертолете Ми-26 — сигнализация появления стружки в масле этих редукторов. Инструментальные методы контроля в полете технического состояния шлицевых муфт и подшипников опор хвостового вала на большинстве типов серийных вертолетов одновинтовой схемы отсутствуют.
Поскольку резкое повышение температуры и понижение давления масла, как правило, совпадают с конечной фазой разрушения деталей промежуточного и хвостового редукторов, а процесс разрушения деталей хвостового вала вообще не диагностируется, рассоединение хвостовой трансмиссии и потеря путевой управляемости вертолета происходят обычно неожиданно для экипажа, что существенно осложняет рассматриваемую ОС
Закономерности поведения вертолета:
при рассоединении хвостовой трансмиссии РВ работает на ре-; жиме самовращения, которое, как и для НВ, может быть установив-I шимся, ускоренным или замедленным. Установившееся самовращение РВ с постоянной частотой реализуется только при определенных сочетаниях шага, скорости полета и угла правого скольжения (рис. 4.10);
на всех эксплуатационных режимах полета без скольжения тяга «свободного» РВ, работающего на режиме самовращения, не обеспечивает путевую балансировку вертолета;
под действием нескомпенсированных реактивного и поперечного моментов НВ вертолет резко разворачивается влево и кренится вправо;
на висении и малых скоростях полета вертолет входит в режим принудительного неуправляемого вращения («волчка») с угловой скоростью 50...100°/с тем большей, чем больше общий шаг НВ и • мощность двигателей в момент отказа хвостовой трансмиссии;
|
вследствие периодического изменения значения и знака продольной и поперечной сил, моментов на втулке НВ и моментных" характеристик корпуса вертолет при полных разворотах в азимутальной плоскости подвержен резким толчкам в противоположные стороны по тангажу и крену;
вследствие воздействия на вертолет периодических сил и моментов стабилизация его положения в пространстве с помощью ручки управления на малых скоростях
Рис 4 10 Условия самовращения РВ |
установившегося 203 |
полета (висении) весьма затруднительна. Неизбежная несинхронность управляющих действий пилота с низкочастотными колебаниями по тангажу и крену при постоянном воздействии несбалансированного момента рысканья приводит, как правило, к дополнительной раскачке вертолета;
при отказе хвостовой трансмиссии на этапах взлета и посадки определяющим для безопасности полета является энергичное крене-ние вертолета вправо, обусловленное неуравновешенным поперечным моментом НВ после резкого уменьшения тяги РВ;
при отказе хвостовой трансмиссии на этапах полета по маршруту с достаточно большой скоростью тенденции к развороту влево и накренению вправо значительно уменьшаются вследствие влияния путевой и поперечной устойчивости и демпфирования корпуса вертолета. В диапазоне скоростей полета Уак<.У<У^ах динамическая реакция вертолета на рассматриваемый отказ характеризуется разворотом влево на 30...60° и накренением вправо на 15...30°;
стабилизация углового положения вертолета в данной ОС обеспечивается созданием углов правого крена и скольжения, суще-.ственно возрастающих до неприемлемых значений порядка 30...50° по мере уменьшения скорости полета;
при больших углах скольжения (40...50°) нарушаются условия обтекания приемников воздушного давления, что приводит к искажению показаний приборной скорости в сторону занижения;
особенности пробега по площадке после приземления в принципе такие же, как и рассмотренные далее для ОС разрушения в полете забустерной части проводки управления рулевым винтом.
Признаки отказа хвостовой трансмиссии и привода вращения РВ следующие:
резкий разворот вертолета влево и'накренение вправо;
интенсивные низкочастотные колебания по тангажу и крену;
при отклонении правой педали для парирования разворота темп разворота вертолета влево вначале замедляется, а затем возрастает;
подвижной индекс канала направления автопилота становится на правый упор; подвижной индекс канала крена автопилота становится на левый упор.
, Рекомендуемые действия пилота определяются отмеченными выше закономерностями поведения вертолета и исходным режимом его полета, на котором произошел отказ хвостовой трансмиссии.
1. На этапах висения, взлета и посадки при малых значениях высоты и поступательной скорости полета:
незамедлительно, но плавно отклонить рычаг «шаг — газ» вниз и перевести вертолет на снижение;
в процессе снижения отклонением ручки управления и правой педали парировать кренение, опускание носа и разворот вертолета, удерживая его по возможности в горизонтальном положении;
произвести приземление на колеса основных опор.
204
2. На режимах. полета по маршруту:
после безуспешной попытки парирования разворота вертолета отклонением правой педали немедленно отклонить педали в нейтральное положение;
устранить разворот вертолета влево созданием углов правого крена 5...15° и скольжения 10...30°;
выключить канал направления автопилота, оставляя включенными каналы тангажа и крена;
не изменяя положения педалей, продолжить полет на скорости не менее наизыгоднейшей, но не более крейсерской до ближайшего аэродрома или подобрать площадку, пригодную для посадки по-самолетному;
направление полета и захода на посадку выдерживать соответствующим кренением и скольжением при нейтральном положении педалей;
заход на' посадку выполнять по пологой глиссаде с поступательной скоростью не менее 100 км/ч, вертикальной скоростью снижения не более 2...4 м/с, по возможности при встречно-боковом ветре справа; /
вывод вертолета из скольжения и придание посадочного положения по крену выполнять непосредственно перед приземлением на высоте 10...15 м отклонением правой педали и ручки управления влево;*
вертикальную скорость снижения уменьшать перед приземлением плавным отклонением ручки управления на себя при постоянном положении рычага «шаг — газ» и примерно за 1 с до приземления допустим небольшой «подрыв» общего шага НВ для смягчения, посадки.
Во всех случаях после приземления вертолета на колеса основных опор: отклонением ручки управления удерживать вертолет от кренения; немедленно и энергично отклонить рычаг «шаг — газ» вниз до упора; выключить двигатели кранами останова,; закрыть пожарные краны; обесточить вертолет.
Если Ъилот имеет опыт или тренаж выполнения вынужденной посадки с выключенными двигателями, целесообразно использовать его в данной ОС, так как при вертикальном снижении или пологом планировании на режиме самовращения НВ вертолет не подвержен неблагоприятному воздействию несбалансированного реактивного момента НВ. В случае отказа хвостовой трансмиссии на висении и малых скоростях и высотах полета выключение двигателей следует производить на высоте 3...5 м, а при заходе на посадку из режима пологого -планирования — на высоте 50м. При этом безопасное приземление обеспечивается эффективным использованием «подрыва» общего шага НВ.
Характерные ошибки пилота. 1. Перевод вертолета в разгон отклонением ручки управления от себя с целью парирования его разворота влево на взлетно-посадочных этапах полета (висении) 205
аналогично рекомендуемому способу вывода вертолета из режима самопроизвольного вращения. В данной ОС увеличение поступательной скорости не приведет к заметному возрастанию тяги свободного РВ, привод которого разрушен, поэтому некоторое незначительное гашение угловой скорости разворота влево достигается в основном за счет возрастающей по скорости путевой устойчивости •корпуса вертолета. Однако при разгоне, как известно, неизбежна просадка вертолета, что на малой высоте само по себе опасно, а если для предотвращения просадки пилот отклонит вверх рычаг «шаг — газ»; усугубляется разворот вертолета влево под действием возросшего реактивного момента НВ. В итоге при такой технике пилотирования вертолет перейдет в расходящуюся нисходящую спираль, вывод из которой для выполнения безопасного приземления с отказавшим путевым управлением практически невозможен.
. 2. Торможение вертолета отклонением ручки управления на себя и' рычага «шаг — газ» вверх с целью незамедлительного захода на вынужденную посадку при отказе хвостовой трансмиссии на этапах полета по маршруту с достаточно большой скоростью. При этом вертолет перейдет на вторые режимы полета с сопутствующим интенсивным возрастанием потребной мощности и соответственно реактивного момента НВ, под действием которого угловая скорость разворота влево еще более возрастает. Кроме того, при уменьшении поступательной скорости резко уменьшается путевая устойчивость, создаваемая корпусом и «свободным» РВ, что также усугубляет интенсивность вращения. В результате вместо захода на посадку вертолет перейдет в опасный режим «волчка», вывод из которого возможен только путем выключения двигателей. В конечном счете и при такой технике пилотирования безопасная посадка или хотя бы грубое приземление вертолета «маловероятны.
3. Заход на посадку с отклоненной вперед правой педалью, оставленной в том положении, при котором пилот пытался парировать неожиданно начавшийся разворот вертолета влево. При этом управляемый, но не приводимый во вращение РВ будет иметь несоразмерно большой для данной ОС шаг, что не обеспечивает переход на режим устойчивого самовращения (см. рис. 4.10). В результате частота вращения и соответственно тяга РВ резко уменьшатся до таких значений, что РВ практически перестанет оказывать влияние на путевую балансировку вертолета и ОС существенно осложнится.
4. Заход на посадку по-самолетному по методике, рекомендуемой РЛЭ для обычных условий летной эксплуатации исправного вертолета, т. е. с гашением поступательной скорости до 60...80 км/ч на высоте 30...20 м и до 30...50 км/ч перед приземлением. При ^ столь малых для рассматриваемой ОС значениях скорости и умерен-1 ных углах правого скольжения, обеспечивающих заход на площадку, РВ выйдет из режима установившегося самовращения, а корпус окажется практически неэффективным в создании путевой устойчивости. В результате при отклонении правой педали и ручки
206 • »
управления влево для придания вертолету посадочного положения непосредственно перед его приземлением произойдет разворот вертолета влево вначале в воздухе, а затем на пробеге. Возможные опасные последствия такой посадки — срыв покрышек, разрушение опор шасси, опрокидывание-вертолета на правый борт.
5. Увеличение общего шага НВ перед приземлением с целью уменьшения вертикальной скорости снижения. Возрастающий при таком управляющем действии реактивный момент НВ развернет вертолет влево с отмеченными выше последствиями. Однако возрастание реактивного момента происходит по закону приемистости двигателей, т. е. практически с запаздыванием 1...2 с по отношению к отклонению рычага «шаг — газ». Поэтому в последний момент перед приземлением можно резко отклонить рычаг «шаг — газ» вверх, но как только колеса коснутся земли, столь же резко отклонить его вниз до упора. Это позволит несколько затормозить вертикальное движение вертолета в воздухе за счет кинетической энергии и аэродинамической эффективности НВ, но не допустить разворота вертолета на земле за счет несбалансированного реактивного момента НВ. Только осознанное и четкое выполнение этого управляющего действия окажется полезным в рассматриваемой ОС, а преждевременное, запоздалое, некоординированное его выполнение окажется не только бесполезным, но и пагубным.
6. Выключение двигателей сразу же после проявления отказа хвостовой трансмиссии при выполнении полета по маршруту. В этом случае существенно ограничивается возможность подбора с воздуха подходящей площадки для вынужденной посадки и практически вместо одной опасной и сложной ОС возникнет другая ОС, не менее опасная и сложная.
4.4. НЕШТАТНОЕ ФУНКЦИОНИРОВАНИЕ АВТОПИЛОТА
Отказы автопилота могут вызывать: установившиеся колебания вертолета относительно одной из осей; медленный уход вертолета с заданного режима полета; резкое изменение положения вертолета в пространстве. Первая из перечисленных ОС проявляется также в колебаниях подвижного индекса индикатора соответствующего канала управления и вызывает колебания вертолета:
по тангажу с амплитудой 2...4° и периодом 2...3 с;
по крену с амплитудой 3...50 и периодом 1,5...2,5 с;
по курсу с амплитудой 8...12° и периодом 3...5 с;
по высоте с амплитудой 2...4 м и периодом 3...6 с. Даже при отсутствии собственной динамической устойчивости амплитуда вынужденных колебаний за период увеличивается не более чем в 1,5 раза, поэтому рассматриваемые отказы не приводят к появлению опасных эволюции вертолета и легко распознаются пилотом, который должен действовать следующим образом:
207
при возникновении колебаний вертолета выключить автопилот и убедиться в исчезновении колебаний;
последовательным включением каналов автопилота определить тот канал, после включения которого колебания вертолета вновь возникают;
выключить отказавший канал автопилота и оценить возможность пилотирования вертолета;
принять решение о продолжении или прекращении выполнения задания.
«Плавные» отказы автопилота сопровождаются отклонением раздвижной тяги автопилота с небольшой скоростью, вызывая постепенное изменение углового положения вертолета в пространстве, скорости, высоты и направления полета. В визуальном полете указанные отказы обычно воспринимаются пилотом как внешнее возмущение и легко парируются соответствующими отклонениями органов управления, так что существенных изменений заданного режима полета, как правило, не происходит. При выполнении полета по приборам возможно обнаружение этих отказов со значительным запаздыванием, как, впрочем, вообще упущение разбалансировки вертолета вплоть до потери пространственной ориентировки.
Медленный уход вертолета с установленного режима из-за «плавного» отказа автопилота сопровождается перемещением под-.вижного индекса нулевого индикатора. При обнаружении этого
аномального явления следует определить отказавший канал автопилота, выключить его и далее действовать согласно изложенным выше рекомендациям.
«Резкие» отказы приводят к отклонению раздвижной тяги автопилота от исходного положения до «малого» упора с максимальной скоростью, обеспечиваемой гидроусилителем. Эти отказы вызывают значительные изменения положения вертолета в пространстве и режима его полета (рис. 4.11, 4.12), быстрее обнаруживаются и требуют немедленного вмешательства пилота для парирования их неблагоприятных последствий.
Основной признак рассматриваемого отказа каналов тангажа и крена — энергичное угловое вращение вертолета относительно соответствующей оси, сопровождаемое изменением скорости или курса полета. При отказе канала направления автопилота наблюдаются разворот и скольжение вертолета, сопровождаемые перемещением педалей в крайнее положение. При отказе канала высоты происходит резкое изменение вертикальной скорости и высоты полета, сопровождаемые уменьшением или увеличением частоты вращения НВ. Во всех случаях отказ какого-либо канала автопилота проявляется в быстром отклонении подвижного индекса нулевого индикатора соответствующего канала в крайнее положение.
Основные количественные закономерности динамической реакции вертолета на резкие отказы автопилота:
на всех эксплуатационных режимах полета опрокидывания вертолета по тангажу (|и|>90°) и крену (1у1>90°) не происходит;
разбалансировка и развитие возмущенного движения вертолета обладают значительным привлекающим эффектом для распознания данной ОС пилотом по акцелерационным ощущениям, визуальному наблюдению за положением вертолета в пространстве и показаниям пилотажно-навигационных приборов;
запаздывание реакции полета на «резкие» отказы автопилота на режимах полета по маршруту не превышают 4...6 с, а на режимах висения, взлета, посадки — 2...3 с.
вмешательство пилота в управление с включенным неисправным автопилотом полностью парирует неблагоприятное развитие ОС и стабилизирует вертолет по угловому положению в пространстве и заданному режиму полета.
Таким образом, автопилот, включенный в систему управления по дифференциальной схеме, можно считать отказобезопасным агрегатом вертолета, что обеспечивается: ограничением в пределах 20 % 'полного хода перемещений органов управления по сигналам автопилота; возможностью непрерывного вмешательства пилота в управление; сигнализацией об отказе по движению и положению подвижного индекса индикатора; возможностью аварийного отключения автопилота кнопкой на ручке управления.
Однако при выполнении полетов (висении) на малой высоте или вблизи наземных препятствий рассматриваемые «резкие» 209
Таблица 4.1. Основные показатели отказы автопилота могут стать
динамической реакции вертолета Причиной серьезного ИНЦИДен-на <резки" отказы автопилота та или даже АП. В связи с этим
На режиме висе ни я
представляют интерес значения определяющих кинематических параметров возмущенного движения вертолета на режиме висения, достигаемые через 3 с после возникновения данного отказа при невмешательстве пилота в управление (табл. 4.1).
Действия пилота при изменении пространственного положения вертолета вследствие «резкого» отказа одного из каналов автопилота аналогичны описанным ранее: предотвращение вращения вертолета своевременным и координированным отклонением рыяагов управления, определение отказавшего канала автопилота и выключение его, принятие решения о продолжении или прекращении выполнения задания.
Повторное включение отказавшего канала автопилота во всех .случаях з а п р е щ а ет с я.
• Важно отметить, что в современных вертолетных автопилотах управляющие сигналы поступают от датчиков к агрегатам управления каждый по своему каналу, параллельно. Это практически исключает взаимовлияние каналов и возможность одновременного отказа каких-либо двух каналов, например крена и тангажа. При отключении питания напряжением 36 В автопилот полностью прекращает свое функционирование, рулевые машины согласуются с положением рычагов управления и дальнейшее пилотирование осуществляется в режиме ручного управления.
Возможность одновременного несанкционированного срабатывания каналов тангажа' и крена, проявляющегося в форме «резкого» отказа, существует для автопилота АП-34Б, установленного на вертолетах типов Ми-6,'Ми-8, Ми-17.
На этих вертолетах включение автопилота в режим стабилизации разрешается не ранее чем через 3 мин после включения питания. Это время необходимо для обнуления сигналов углов при работе в режиме согласования и для прогрева усилителей каналов автопилота. Кроме того, включение автопилота можно производить только при включенном и зааретированном левом авиагоризонте, а для приведения его в рабочее состояние также требуется 1,5...2 мин. Однако неблагоприятной конструктивной особенностью автопилота типа АП-34Б является возможность включения каналов тангажа и крена в режим стабилизации при невключенном (не зааретированном) авиагоризонте и непрогретых усилителях каналов.
210
Необходимо иметь в виду, что нештатное функционирование автопилота, проявляющееся в форме «резкого» или «плавного» отказа, может быть следствием возникновения отказного состояния не самого автопилота, а взаимодействующего с ним левого авиагоризонта.
Если вылет вертолета по каким-либо причинам осуществляется в спешке и пилот допустит нарушение установленных последовательности и временных интервалов включения источника питания, левого авиагоризонта и автопилота, произойдет следующее: после окончания прогрева усилителей каналов на их входы поступают сигналы углов тангажа и крена с левого авиагоризонта, равные тем значениям, на которые были завалены картущка и силуэтик самолета до момента включения авиагоризонта. При этом соответственно исполнительные штоки рулевых агрегатов автопилота резко перемещаются до «малого упора» с_максимальной скоростью, обеспечиваемой гидроусилителями, а подвижные индексы каналов тангажа и крена отклоняются в крайние положения. Направления указанных перемещений (вперед, назад, вправо, влево) могут быть различными в зависимости от направления завала картушки левого авиагоризонта после его выключения.
Подобное нештатное срабатывание автопилота создает ОС, значительно более опасную, чем просто «резкий» отказ автопилота, так как происходит неожиданный рывок вертолета одновременно по тан-гажу и крену; вертолет в процессе взлета находится, как правило, на предельно малой высоте над площадкой. Поэтому, если' пилот растеряется и не парирует незамедлительно вращение вертолета по тангажу и крену, произойдет удар о землю лопастей несущего или рулевого винта с очевидными последствиями.
На вертолетах типов Ми-26 и К. а-32, имеющих автопилот ВУАП-1, описанная ОС невозможна—режим стабилизации этого автопилота включается только при включенных источниках питания, исправных зааретированных гировертикалях и после окончания режима согласования в каналах тангажа и крена.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
