

что угол отклонения подъемного каната от его начального положения (соответствующего началу черпания) β связан с центральным углом контакта ковша экскаватора βН с породным массивом (навалом) высотой h соотношением:
 ,рад, (4)
,рад, (4)
где β0 – угол отклонения подъемного каната от вертикали (в начале черпания) ,рад, после соответствующих алгебраических преобразований имеем регулировочную характеристику, по которой следует управлять вращением барабанов лебедок напора и подъема:
 , (5)
, (5)
где ωН и ωП – скорости вращения барабанов лебедок напора и подъема соответственно, рад/с.
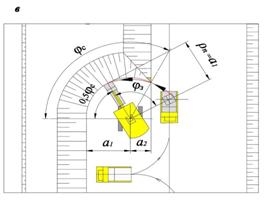
Машинист экскаватора, управляя одновременно командоконтроллерами скорости подъема и напора, практически не может обеспечить оптимальную кардиоидальную траекторию копания. Поэтому нами предлагается принципиальная схема автоматического управления приводом механизма напора экскаватора (рисунок 4), позволяющая машинисту задавать только скорость подъема ковша, при этом скорость напора автоматически обеспечит его движение по кардиоидальной траектории.
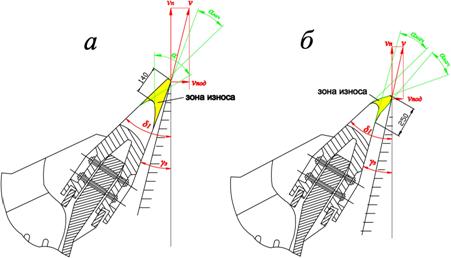
Рисунок 4 – Принципиальная схема автоматического управления приводом механизма напора экскаватора: а – угол резания δ1 при движении ковша по кардиоидальной траектории копания; б – алгоритм управления приводом механизма напора и система первичных датчиков
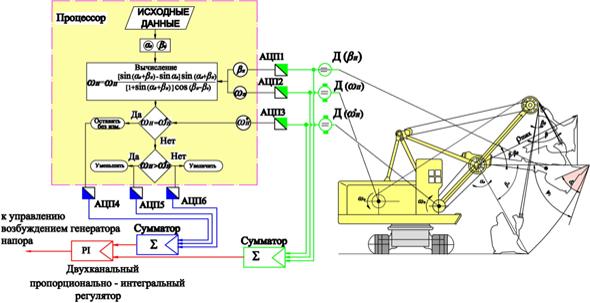
Схема автоматического управления приводом механизма напора экскаватора
(рисунок 4) включает систему первичных датчиков с аналого-цифровыми преоб-
разователями, процессор и двухканальный пропорционально-интегральный регулятор при заданных значениях углов: α0 – начальной угловой координаты рукояти; β0 – угла отклонения подъемного каната от вертикали в начале черпания.
В процессе выемки слоя породы на ковш экскаватора действует сила реакции забоя P, которую можно представить в виде ее ортогональных составляющих: Pτ , направленной по касательной к траектории движения ковша (кардиоиде) и нормальной составляющей Pn , направленной по радиусу кривизны ρ траектории движения (рисунок 5).
Касательная сила сопротивления породы копанию прочностью σ (Н/м2) на ковше определится, как:
![]() ,Н, (6)
,Н, (6)
где kдП ,kдН – коэффициенты динамичности приводов подъема и напора ковша экска-
Рисунок 5 – Схема сил действующих на рабочее оборудование экскаватора в процессе черпания
ватора соответственно, характеризующие уровень колебаний касательной составляющей силы сопротивления породы копанию с учетом жесткости электромеханических систем (ЭМС) приводов подъема и напора ковша экскаватора; kдпод – коэффициенты динамичности механизма подвески стрелы экскаватора; B – ширина ковша, м.
Нормальная составляющая силы сопротивления породы копанию в соответствии с результатами, полученными ранее, определяется из соотношения:
![]() ,Н, (7)
,Н, (7)
где  – сила трения (в основном передней стенки) ковша о породу по траектории забоя, Н; ψ – коэффициент, характеризующий отношение нормальной к касательной составляющей силы сопротивления породы копанию, равный ψ = 0,3…0,7, причем большее значение коэффициента соответствует экскавации связанных пластичных, а меньшее – крепких и хрупких пород; f – коэффициент трения стали о породу.
– сила трения (в основном передней стенки) ковша о породу по траектории забоя, Н; ψ – коэффициент, характеризующий отношение нормальной к касательной составляющей силы сопротивления породы копанию, равный ψ = 0,3…0,7, причем большее значение коэффициента соответствует экскавации связанных пластичных, а меньшее – крепких и хрупких пород; f – коэффициент трения стали о породу.
Сила сопротивления движению ковша Pg (рисунок 5) до высоты стружки – h определена как произведение модуля ускорения на массу движущегося груженого ковша:
![]() ,Н, (8)
,Н, (8)
где ρП – плотность разрыхленной породы в ковше, кг/м3; kk – безразмерный коэффициент равный ![]() ; mк – приведенная к траектории движения масса
; mк – приведенная к траектории движения масса
ковша, кг.
При скорости разрушения горной породы до 3 м/с одним из основных условий рационального отделения стружки от массива является сохранение определенного положения зубьев ковша экскаватора относительно траектории его движения. Однако в процессе экскавации зубья ковша подвергаются абразивному изнашиванию, приводящему к их постепенному затуплению и соответственно к изменению величины угла резания δ1.
В настоящее время на железорудном карьере ГОК» на экскаваторах ЭКГ–8И и ЭКГ–10 используются сменные зубья ковша конструкции ИЗ – КАРТЭКС им », отливаемые из износостойкой высокомарганцовистой стали 110Г13Л (рисунок 6, а). В соответствии с инструкцией по технической эксплуатации величина износа зубьев ковша не должна превышать 120…140 мм, что соответствует углу заострения зуба α , равному 60 градусов. Зубья с износом более 140 мм считаются непригодными для дальнейшей эксплуатации. Однако на практике в условиях дефицита зубьев их предельный износ может достигать 200 мм, что соответствует углу заострения зуба α, превышающему 60 градусов. Работа экскаватора с такими зубьями характеризуется увеличенными нагрузками на его рабочее оборудование, повышенным износом режущей кромки и передней стенки самого ковша и соответственно увеличением энергоемкости процесса копания за счет увеличения отношения нормальной к касательной составляющей силы сопротивления породы копанию (увеличению коэффициента ψ).
Рудоуправление Стойленского ГОКа совместно с Московским государственным горным университетом в течение 2008–2009 годов с целью увеличения износостой-
кости зубьев поэтапно занималось совершенствованием конструкции и технологии изготовления зубьев ковша экскаватора ЭКГ –10 (рисунок 6, б).
Первый этап включал работы по совершенствованию технологии литья зубьев «ИЗ-КАРТЭКС» методом борирования - насыщением карбидом бора рабочих поверхностей зуба при литье.
Второй этап включал работы по совершенствованию формы зубьев, в результате которых была предложена инновационная конструкция зуба с увеличенным на 70…80% объемом его истираемой части. Такая форма зуба позволяет сохранить на-
Рисунок 6 – Конструкция зуба: а – «ИЗ–КАРТЭКС им. » ; б – конструкция зуба РУ СГОК совместно с МГГУ
чальный угол заострения (α =22…25º) одинаковым до замены зубьев, то есть до величины предельного износа в 250 мм (см. рисунок 6, б).
Испытания износостойкости экспериментальных партий зубьев проводились на пяти экскаваторах железорудного карьера октябре - ноябре 2008 года. Исследованиями износостойкости установлено, что эксплуатация вооружения ковша карьерного экскаватора с неборированными зубьями инновационной конструкции позволяет увеличить стойкость (средний объем добычи руды на один комплект зубьев) одного комплекта зубьев в 2,82 раза по сравнению с зубьями базовой неборированной и 1,5 раза по сравнению с борированными зубьями базовой конструкции. В то же время стойкость борированного зуба конструкции ИЗ – КАРТЭКС » по сравнению с неборированным увеличилась только в 1,8 раза.
Известно, что поворот экскаватора с рабочим оборудованием «прямая напорная лопата» и его возврат в забой занимает до двух третей длительности рабочего цикла, определяющего производительность современного карьерного оборудования.
Сегодня работа сил сопротивлений движению поворотной платформы экскаватора AГ определяется из уравнения кинетической энергии системы «двигатель – поворотная платформа» с учетом разгона и торможения платформы во время поворота экскаватора с груженым и порожним ковшом:
![]() , Нм. (9)
, Нм. (9)
Работа сил сопротивлений движению поворотной платформы экскаватора с уче-
том ее разгона и торможения AГI во время поворота экскаватора с груженым и по-
рожним ковшом составляет:  , Нм, (10)
, Нм, (10)
где Iг , Iп – моменты инерции поворотной платформы экскаватора, кг м2; kI = 1,1– коэффициент, учитывающий условную работу сил инерции якоря электродвигателя; ωпл – угловая скорость вращения платформы, рад/с.
Работа, затраченная подъемным и напорным механизмами при повороте платформы экскаватора AГτn, Нм:
 , Нм, (11)
, Нм, (11)
где kП , kН – коэффициенты загрузки приводов подъема и напора во время поворота экскаватора с груженым и порожним ковшом, kП =0,365, kН =0,715; ρ(βН) – радиус кривизны части траектории, соответствующей центральному углу (кардиоиды) контакта ковша экскаватора βН.
С целью упрощения математического аппарата моменты инерции поворотной платформы экскаватора - Iг , Iп предложено определять как произведение массы на квадрат кардиоидального радиуса инерции по нижеследующим зависимостям:
– с груженым ковшом при поворотном движении к месту выгрузки:
![]() , кгм2 ; (12)
, кгм2 ; (12)
– с порожним ковшом при поворотном движении в забой:
 , кгм2, (13)
, кгм2, (13)
где kг ,kп – коэффициенты, учитывающие моменты инерции вращающихся частей (поворотной платформы, стрелы с блоками, ковша с породой и без нее относительно оси вращения платформы) при повороте с груженым и порожним ковшом, соответственно, составляют:  ; (14)
; (14)
 , (15)
, (15)
здесь  ,
, – действительный ( или расчетный) суммарный момент инерции
– действительный ( или расчетный) суммарный момент инерции
платформы экскаватора при поворотном движении к месту выгрузки и при возврате в забой с груженым и порожним ковшом соответственно, кг м2; mк , mп – масса ковша и
породы соответственно, кг; ρпг , ρпп – кардиоидальные радиусы инерции маховых
масс поворотной части при движении экскаватора с груженым и порожним ковшом
соответственно, м.
На основе выполненных расчетов линейных и массовых параметров экскаваторов ЭКГ – 8И, ЭКГ – 10 (изготовитель ИЗ– КАРТЭКС им ) и ЭКГ– 12,5 (изготовитель ПО «Крастяжмаш») установлено, что коэффициенты, учитывающие момент инерции вращающихся частей для экскаваторов с рабочим оборудованием «прямая напорная лопата», составляют kг = 1,6 ÷1,62, kп = 2,3 ÷ 2,31. Причем большее значение коэффициентов соответствует конструкции экскаваторов с меньшей вместимостью ковша.
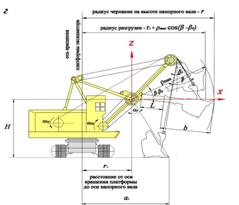
Что касается кардиоидальных радиусов инерции маховых масс ρпг , ρпп поворотной платформы экскаватора, то здесь следует отметить, что они определяются при движении с груженым ковшом на выгрузку и при движении с порожним ковшом в забой на угол φ = φз ( рисунок 7) по зависимостям :
![]() , м; (16)
, м; (16)
![]() , м. (17)
, м. (17)
Средний радиус инерции ρпов маховых масс поворотной платформы экскаватора за время (tпг + tпп) поворота в горизонтальной плоскости при движении с груженым ковшом на выгрузку и при движении с порожним ковшом в забой на угол φ = φз определится как среднее арифметическое значение радиусов инерции при движении платформы экскаватора с груженым и порожним ковшом:
![]() ,м. (18)
,м. (18)
Таким образом, установлено, что минимальный уровень статического нагружения (Pτ → min, Pn → min, ) рабочего оборудования в процессе отработки экскаватором породного уступа может быть достигнут только при оптимальных параметрах кардиоидальной траектории движения (ρmax, ρmin, t0 ) и конструкции вооружения ковша экскаватора (δ1= const).
В третьей главе рассмотрены теоретические аспекты рабочего процесса упругодемпфирующих устройств.
Известно, что реальный процесс формирования сил сопротивления является динамическим ( kдН >1, kдП >1), поэтому для уменьшения потерь производительности актуализируется задача снижения динамики приводов подъема и напора в процессе отработки породного уступа экскаватором с рабочим оборудованием «прямая напорная лопата» ( kдН → min, kдП → min).
Проблемы динамических явлений в горных машинах, в том числе в карьерных экскаваторах, нашли отражение в трудах докторов технических наук Панкратова
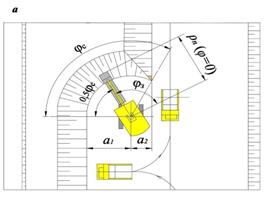
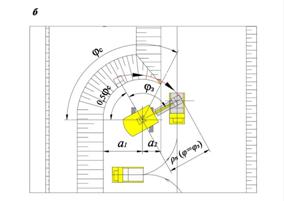
Рисунок 7 – Расчетная схема определения радиусов инерции маховых масс поворотной платформы экскаватора: а – момент окончания черпания; б, г – момент начала разгрузки; в – момент начала черпания
С. А., , Каминской
Д. А., и многих других российских ученых.
Сегодня задача стабилизации рабочего процесса экскаватора решается путем применения упругодемпфирующих устройств (УДУ).
Выполненный нами анализ многокомпонентных упругодемпфирующих устройств и принципиальных схем их включения в механизмы подвески, подъема и напора экскаватора показывает целесообразность использования в узлах одноковшовых экскаваторов в качестве малокомпонентного и высоконадежного упругодемпфирующего устройства пневматической шины, как имеющей наибольшую работу упругих сил на единицу ее веса и наименьший вес на единицу нагрузки.
С целью унификации конструкции пневматической шины УДУ для всех механизмов рассматриваемых моделей экскаваторов выбрана шина марки Фбел – 199, применяемая в скреперах, фронтальных погрузчиках и автогрейдерах практически на всех железорудных карьерах РФ.
Упругодемпфирующее устройство с пневматической шиной, устанавливаемое в реактивном звене механизма или привода экскаватора, состоит из пневматической шины, рычага, регулируемого упора и пневмогидравлической системы (рисунок 8).
Рисунок 8 – Принципиальная схема упругодемпфирующего устройства карьерного экскаватора с пневматической шиной
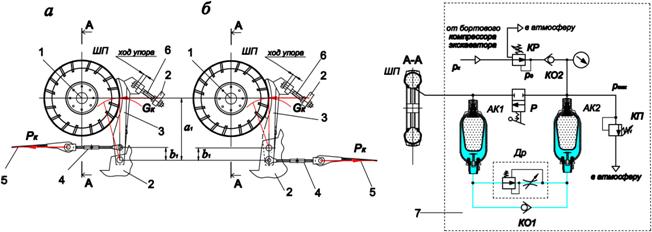
Упругодемпфирующее устройство с пневматической шиной работает следующим образом (см. рисунок 8):
В процессе экскавации породы распределитель Р находится в крайнем нижнем положении. Периодическое изменение нагрузки в приводе экскаватора вызывает соответствующие силовые периодические возмущения в реактивном звене 5, которые посредством натяжной муфты 4 передаются рычагу 3, в результате чего деформируется пневматическая шина. При этом энергия динамической составляющей нагрузки в приводе экскаватора рассеивается дросселем Др, установленным между гидравлическими полостями пневмогидравлических аккумуляторов АК1 и АК2. При уменьшении нагрузки в реактивном звене 5 обратный клапан КО1 обеспечивает неразрывность потока рабочей жидкости между гидравлическими полостями аккумуляторов АК1 и АК2. Уровень настройки предохранительного клапана КП соответствует максимальному контурному давлению pmax на протектор шины (полному исчерпанию хода упора) 6. Наполнение пневматических полостей аккумуляторов АК1 и АК2 и пневматической шины ШП осуществляется до зарядного давления p0 бортовым компрессором экскаватора, при этом распределитель Р устанавливается в крайнее верхнее положение, соединяя между собой пневматические полости аккумуляторов АК1 и АК2.
Радиальная нагрузка – Gк(y) пневматической шины УДУ (рисунок 9) приводит к прогибу шины и возникновению площади её контакта с опорной поверхностью рычага 3. Величина прогиба y определена из уравнения, предложенного доктором техн. наук :  , (19)
, (19)
где α1 – постоянная величина; dШ – диаметр беговой дорожки шины, м; rП – радиус поперечной кривизны протектора шины, м; α2 – постоянная величина для шин грузовых автомобилей, равная 2,2∙10–8 м2/Н; p0 – зарядное давление воздуха в пневматической шине, Па; EШ – приведенный модуль упругости шины под действием радиальной нагрузки Gк.
Что касается аналитического представления объема и формы деформации пневматической шины, то здесь следует отметить, что с целью упрощения аналитического аппарата тороидальный объем уменьшения газа ∆V под действием радиальной силы Gк представлен в виде правильной пирамиды с площадью основания Sк(y) и высотой y. То есть с объемом равным ∆V=1/3y Sк(y).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
