

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Радиальная жесткость УДУ CУДУ с пневматической шиной определена как частная производная от реактивной нагрузки Pк(y) в функции прогиба y при известных зарядном давлении ро и приведенном модуле упругости шины Еш, Н/м:
 , (20)
, (20)
где kУДУ – коэффициент, учитывающий увеличение объема газа за счет пневмогидравлических аккумуляторов.
В свою очередь приведенный коэффициент демпфирования пневмогидравлического УДУ получен из уравнения расхода рабочей жидкости через сечение дросселя USдр Vдр, предложенного доктором технических наук, профессором , с учетом параметра регулирования сечения дросселя U, коэффициента, учитывающего увели -
Рисунок 9 – Расчетная схема определения уменьшения объема газа в шине под действием радиальной нагрузки
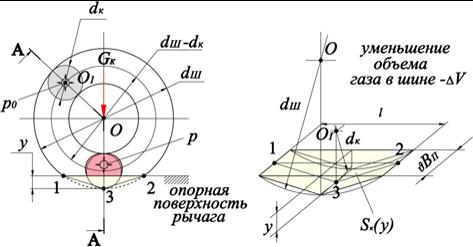
чение объема газа за счет пневмогидравлических аккумуляторов kУДУ , размерного параметра пропорциональности λ , коэффициентов, характеризующих параметры шины ξ, α3 и показателя политропы n:
 ,кг/м, (21)
,кг/м, (21)
где размерный параметр пропорциональности λ коэффициента демпфирования
пневмогидравлического УДУ и коэффициенты ξ, α3 для шины Фбел– 199 принимают значения:![]() кг/м5/2 ;
кг/м5/2 ;  м-3/2;
м-3/2;  м2; λ/ξ =2,35∙1011 м0,5.
м2; λ/ξ =2,35∙1011 м0,5.
Четвертая глава посвящена исследованию динамики процесса экскавации. В процессе черпания изменяются длины деформируемых частей канатов. Линейная жесткость cкi с учетом модуля упругости материала каната при растяжении Eс = 2,1∙1011 Па, в функции центрального угла контакта ковша экскаватора с забоем βН составляет:  , Н/м, (22)
, Н/м, (22)
где nк – число параллельных ветвей канатов i- го механизма экскаватора, ед, ; Sкан – сечение одного каната, м2; ki – размерный коэффициент i –го механизма экскаватора равный:
для конструкции подвески стрелы ![]() , м-1; (23)
, м-1; (23)
механизма подъема  , м-1; (24)
, м-1; (24)
механизма напора  , м-1. (25)
, м-1. (25)
Анализ зависимостей линейной жесткости канатов cк(βН) механизмов подвески стрелы (23), подъема и напора (24, 25) ковша карьерного экскаватора ЭКГ–10 от величины центрального угла βН контакта ковша с породным массивом при черпании показал, что: величины жесткостей канатов механизмов подвески стрелы и напора ковша экскаватора ЭКГ–10 практически не зависят от изменения центрального угла βН контакта ковша с забоем. Причем линейная жесткость канатов подвески стрелы в 16 раз больше, чем линейная жесткость канатов механизма напора и составляет 16∙107 Н/м; в диапазоне изменения центрального угла контакта ковша с забоем 0 ≤ βН ≤ 0,97π/4 жесткость канатов механизма подъема нелинейно возрастает с величины 6,3∙107 Н/м, а в диапазоне изменения центрального угла 0,97π/4 = βН ≤ π/3 практически равна бесконечности; для определения жесткости канатов механизма напора скн в диапазоне изменения центрального угла контакта ковша с забоем 0 ≤ βН ≤ π/3 с достаточной степенью точности размерный коэффициент kн (βН) можно определять по формуле:  ,м-
,м-
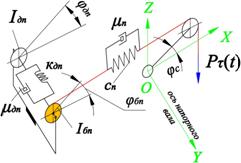
Для решения задач динамики, в частности исследования колебаний элементов рабочего оборудования (верхней секции стрелы и рукояти с ковшом) экскаватора, были сформированы принципиальные динамические модели (рисунок 10). Так, механизм подвески стрелы представлен в виде одномассной динамической системы с обобщенной координатой φпод (рисунок 10, а), а механизмы напора и подъема ковша экскаватора представлены в виде двухмассных динамических систем с обобщенными координатами φдн, φбн и φдп, φбп (рисунок 10, б, в) соответственно.
Рисунок 10 – Принципиальные динамические модели механизмов: а – подвески стрелы; б – подъема; в – напора карьерного экскаватора а | б
| в |

Уравнения движения ((27), (28), (29) рисунок 11) элементов рабочего оборудования карьерного экскаватора в функции обобщенных координат (для принципиальных динамических моделей его механизмов – рисунок 10) получены на основе уравнения Лагранжа второго рода. Для оценки влияния инерциальных, жесткостных и
|
б |
| ||||
| в |
| ||||
Рисунок 11 – Дифференциальные уравнения движения элементов рабочего оборудования карьерного экскаватора: а – подвески стрелы; б – подъема; в – напора карьерного экскаватора. | (29) |
|
В уравнения (27), (28) и (29) входят: Iвс, Iдп , Iдн, Iбп, Iбн – динамический момент инерции верхней секции стрелы (относительно оси напорного вала экскаватора), электродвигателя постоянного тока, барабанов механизмов подъема и напора экскаватора (с учетом маховых масс рукояти с ковшом), приведенные к валу электродвигателей, соответственно, кг м2; lвс – длина верхней секции стрелы экскаватора, м; iрп,iрн – передаточное отношение редуктора лебедки подъема и напора соответственно; iпп, iпн – коэффициент полиспастности запасовки канатов подъема и напора соответственно; кSj и μSj – суммарная жесткость трансмиссии и суммарный коэффициент демпфирования привода j - го элемента i – го механизма карьерного экскаватора, Нм/рад; Тд – постоянная времени, Тд = 2 с; νi – условный коэффициент крутизны статической характеристики электродвигателя постоянного тока i – го механизма экскаватора; φдi – обобщенная угловая координата вращения вала электродвигателя постоянного тока i – го механизма экскаватора, рад; ωСi – скорость вращения вала электродвигателя постоянного тока i – го механизма экскаватора при нулевой нагрузке, рад/с; Мдi –крутящий момент электродвигателя i –го механизма экскаватора соответственно.
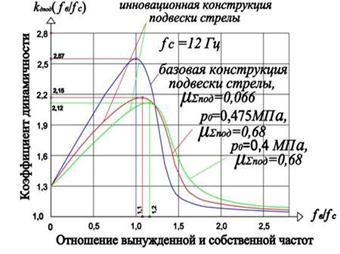
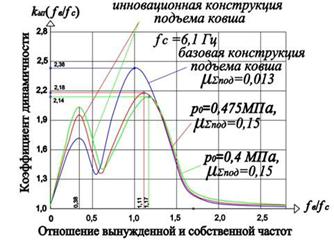
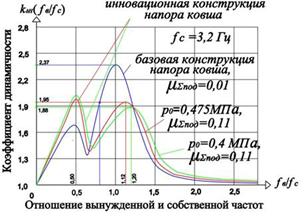
демпфирующих параметров электромеханических систем рабочего оборудования на спектр их колебаний принят коэффициент динамичности нагрузки kдi ( fв / fc ), для i - го механизма экскаватора (рисунок 11 а, б, в) определяемый в функции амплитудно-частотной характеристики (АЧХ) его электромеханической системы по формуле:
 . (30)
. (30)
Математические модели систем «подвеска стрелы, подъем и напор ковша – забой» (уравнения движения электромеханических систем экскаватора) представляют собой системы однородных дифференциальных уравнений. Интегрирование (моде-
лирование) уравнений движения было выполнено методом Рунге – Кутта по программе, разработанной на кафедре Горные машины и оборудование МГГУ доцентом Сандаловым обеспечивает относительную ошибку в резонансной зоне по амплитуде не более 8 %, а по частоте не более 0,5%.
Анализ зависимостей (30), приведенных на рисунке 11, а, б, в, показал, что при введении пневмогидравлического УДУ в электромеханическую систему механизмов экскаватора минимальный коэффициент динамичности рабочего оборудования соответствует минимально возможной жесткости, ограниченной зарядным давлением p0 = 0,4 МПа, обеспечивающим заданную величину начального прогиба y0 пневматической шины, и максимальной величине коэффициента демпфирования.
При этом наблюдается увеличение коэффициента динамичности на собственных частотах колебания нагрузки на валах электродвигателей механизмов подъема и на
пора экскаватора.
Для уяснения влияния динамичности рабочего процесса экскаватора на его производительность разработана многопараметрическая имитационная модель (система
совместных нелинейных алгебраических уравнений (31)) удельной технической производительности экскаватора Qу с учетом динамического процесса формирования сил сопротивления на его рабочем оборудовании. Под удельной технической производительностью экскаватора принята величина, обратная суммарной энергоемкости (HWК – копания и HWП – поворота экскаватора) процесса отработки уступа за один цикл работы экскаватора в зависимости от угла его поворота в забое φз.
(31) | В систему уравнений (31) входят:kk – коэффициент, характеризующий отношение масс ковша и породы, равный kk =1,5; η – КПД механизмов экскаватора; ψmin – коэффициент, характеризующий минимальное отношение нормальной к касательной составляющей силы сопротивления породы копанию |
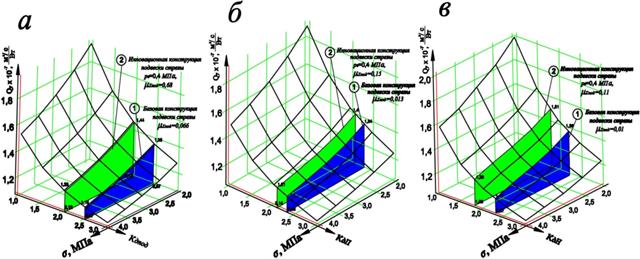
Результаты моделирования системы совместных нелинейных алгебраических уравнений, учитывающие влияние параметров экскаватора, работающего в забоях с различными технологическими и прочностными параметрами, приведены на рисунке 12, а, б, в. Анализ зависимости удельной технической производительности экскаватора от прочности породы и коэффициента динамичности свидетельствует, что мини-
мальный уровень затрат на проектирование, изготовление и техническое обслуживание достигается при оснащении УДУ пневматической шиной с минимально воз - можной жесткостью (СУДУ (y0+y) → min) при зарядном давлении p0, обеспечивающем заданную величину начального прогиба шины y0 только механизма напора ковша экскаватора (рисунок 12, в).
Таким образом, многопараметрическая имитационная модель определения уровня удельной технической производительности экскаватора (система совместных нелинейных алгебраических уравнений – (31), позволяет учесть влияние конструк-
тивных (E,H, r, r1, L, b, B,D, βН, kk), кинематических (ωП, ωН, ωпл, φз), силовых( ψ,η, NП, NН , NПов ,kI ,kг, kп) , жесткостных ( скi(βH), сУДУ, кi, кΣi ), диссипативных (μi, μΣi ,μУДУ) и инерциальных (I(β), Iд ,Ij) динамических параметров экскаватора , работаю-
Рисунок 12 – Зависимость удельной технической производительности – Qу от коэффициента динамичности процесса формирования сил сопротивления на рабочем оборудовании экскаватора ЭКГ-10 – kдi при различной прочности – σ экскавируемой породы для: а –подвески стрелы, б – подъема и в – напора ковша; линии 1 и 2 соответствуют удельной технической производительности базовой конструкции механизма экскаватора и оснащенной УДУ соответственно
щего в забоях с различными технологическими и прочностными характеристиками (σ , ρП, kр , a1).
ЗАКЛЮЧЕНИЕ
В диссертационной работе на основе выполненных исследований дано новое решение актуальной научной задачи: разработки комплекса научно-технических мероприятий для обоснования и выбора рациональных динамических параметров рабочего оборудования карьерных экскаваторов, эксплуатирующихся в различных горнотехнических условиях в зависимости от их конструктивных, кинематических, силовых характеристик.
Основные научные выводы и результаты диссертационной работы, полученные лично автором, заключаются в следующем:
1. Установлено, что траектория движения ковша, близкая к оптимальной, образуемая путем сочетания подъема со скоростью VП и подачи (напора) ковша на забой со скоростью VН должна соответствовать однополюсной конхоиде (кардиоиде);
2. Движение вооружения ковша по оптимальной кардиоидальной траектории копания может быть получено путем автоматического регулирования скоростей вращения барабанов подъема ωП и напора ωН по установленной в настоящей работе аналитической зависимости – ωН = ωП (βН) , обеспечивающей постоянство значений угла ψ1 между передней стенкой ковша и радиусом–вектором ρ (βН) и угла резания δ1.
3. Разработана конструкция зуба ковша экскаватора и экспериментально установлено, что эксплуатация вооружения ковша карьерного экскаватора с неборированными зубьями модернизированной конструкции позволяет увеличить средний объем добычи руды в 2,82 раза по сравнению с зубьями базовой неборированной и 1,5 раза по сравнению с борированными зубьями базовой конструкции.
4. Разработана принципиальная схема пневмогидравлического адаптированного к условиям эксплуатации на современных горных предприятиях упругодемпфирующего устройства с пневматической шиной, устанавливаемого в подвеске стрелы или в приводах подъема и напора ковша экскаватора и позволяющего воспринимать динамические реактивные колебания от сил сопротивления движению ковша экскаватора.
5. Установлено, что величина жесткости канатов механизмов подвески стрелы и напора ковша экскаватора ЭКГ–10 практически не зависит от изменения центрального угла контакта ковша с забоем – βН. Причем линейная жесткость канатов подвески стрелы в 16 раз больше, чем линейная жесткость канатов механизма напора, и составляет 16∙107 Н/м. В то же время жесткость канатов механизма подъема нелинейно возрастает с величины 6,3∙107 Н/м (в диапазоне изменения центрального угла 0 ≤ βН ≤ 0,97π/4) практически до бесконечности (в диапазоне изменения центрального угла 0,97π/4 = βН ≤ π/3).
6. Установлено, что при введении упругодемпфирующего устройства с пневматической шиной в динамическую систему механизмов рабочего оборудования экскаватора с учетом жесткости канатов его минимальный коэффициент динамичности соответствует жесткости пневматической шины (Фбел –199), ограниченной зарядным давлением p0 = 0,4 МПа, обеспечивающим допустимый начальный прогиб шины при максимальной величине коэффициента демпфирования μ.
7. Установлено, что минимальный уровень затрат на проектирование, изготовление и техническое обслуживание достигается при оснащении УДУ только механизма напора ковша экскаватора. Поскольку при динамическом процессе формирования сил сопротивления на рабочем оборудовании экскаватора ЭКГ-10 уменьшение коэффициента динамичности подвески верхней секции стрелы на 21%, подъема ковша на 11 % и напора ковша на 26 % приводит к увеличению удельной технической производительности экскаватора: для взорванных связанных и пластичных пород (σ = 2,0 МПа) с 1,35 до 1,44 ; с 1,34 до 1,421 и с 1,38 до 1,51 на 10-7; для взорванных крепких и хрупких пород (σ =4,0) с 1,15 до 1,23 ; с 1,1 до 1,21 и с 1,17 до 1,28 на 10-7 метров кубических в секунду на ватт установленной мощности соответственно;
8. Основные результаты диссертационной работы нашли применение в плановых проектно-конструкторских разработках –КАРТЭКС им. » на гг. по совершенствованию существующих и созданию инновационных конструкций рабочего оборудования карьерных экскаваторов.
Основные положения диссертации отражены в следующих работах, опубликованных:
в ведущих рецензируемых научных журналах:
1. , . Обоснование параметров вооружения рабочих органов карьерного оборудования // Уголь.–2010.– №10 – С. 71–73
2. , , . Изнашивание и самозатачиваемость вооружения ковша карьерного одноковшового экскаватора// Горное оборудование и электромеханика. – 2011.– №2.– С. 13–16
и в других научных изданиях:
3. , . Параметры нагружения основных механизмов экскаватора при отработке уступа//«Современные техника и технологии горно-металлургической отрасли и пути их развития». Мат–лы международной научно-технической конференции – Навои: Изд-во НГМК, 2010.- С.182-183
4. , , . Обзор и анализ параметров конструкций упругодемпфирующих устройств // Научный вестник МГГУ. выпуск 8. – 2010. С. 106-113, http:// vestnik.msmu.ru
5. , . Анализ силовых и кинематических параметров поворотных механизмов современного карьерного оборудования цикличного действия // Проблемы освоения недр в ХХI веке глазами молодых. Материалы 7 Международной школы молодых ученых и специалистов.– 2010.– с.247–250.
6. , . Обзор и анализ параметров конструкций упругодемпфирующих устройств // Научный вестник МГГУ. выпуск 1. – 2011. С. 12-16, http:// vestnik.msmu.ru
Подписано в печать 28 февраля 2012 Формат 60х90/16
Объем 1 п. л. Тираж 100 экз. Заказ №
ОИУП Московского государственного горного университета.
Москва, Ленинский проспект, 6

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
