
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Керування двохщелипним грейфером за допомогою канатного поліспаста для виграша в силі, розташованого окремо від грейфера й з'єднаного з гідроциліндром, показане на рис. 1.12, в. Блоки 4 і замикаючий канат 3 переміщаються гідроциліндром 5. Для підйому навантаженого грейфера й опускання розкритого служить гідроциліндр 6, що входить у здвоєний поліспаст для замикаючого 3 і піднімального канату 2. Розкриття грейфера для вивантаження ведеться гідроциліндром 5 при втягуванні штока в циліндр. Електрогідравлічні грейфери можуть бути виконані незнімними (тверде кріплення зі стрілою крана) і знімними. У цих грейферах привід насоса здійснюється через електродвигун, установлений на грейфер.
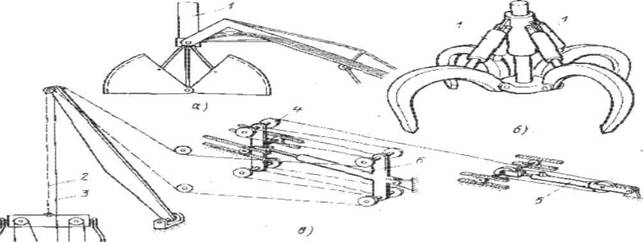
Рис 1.12. Схема підвіса гідравлічних грейферіва ; а - жорсткий підвіс до стріли крана; б - керування багато щелепним грейфером гідроциліндрам прапорами: в - керування двухканатним грейфером канатно-гідравлічною системою. Електрогідравлічні грейфери розділяють на грейфери зі штоковимими гідроциліндрами, з телескопічними гідроциліндрами й лопатевими неповноповоротними двигунами. Приводний механізм змикання щелеп електрогідравлічних грейферів може бути важільним, рейковим і з канатними тягами. Електрогідравлічний грейфер з перехресними щелепами й з телескопічними гідроциліндрами тягами показаний на рис. 1.13, а. У цьому грейфері в якості гідроциліндрів використані гідропідйомники вантажних автомобілів. Це забезпечує відносно малі габарити розкритого грейфера по висоті й одержання значних моментів, що зачерпують, на щелепах.
Рейковий приводний механізм змикання щелеп показаний нарис. 1.13, б. На голівці грейфера встановлений електродвигун 3, з'єднаний з насосом 4, у який надходить робоча рідина з гідробака 2. Робоча рідина надходить до гідроциліндра із двох сторін. Штоки поршня гідроциліндра виконано у вигляді двох рейок; у лівої рейки зуби нарізані у верхній частині, у правої — у нижній частині. При русі штока вправо шестірні 1, що входять у зачеплення з рейками 6 і жорстко з'єднані з важелями 5, обертаються й повертають щелепи 7 грейфера шарніри, що мають, 8. Рух штока вправо відповідають змиканню щелеп, рух уліво — розкриттю. Жорстке з'єднання щелеп з рейками виключає незалежний рух кожної щелепи. При влученні між щелепами великих шматків матеріалу, які не можуть бути зруйновані стискальними зусиллями щелеп, різко зростає опір на щелепах, зусилля в гідроциліндрі стає недостатнім для руху, і робоча рідина починає циркулювати по замкненім колу між розподільною камерою, насосом і масляним бачком. Приводний механізм змикання щелеп від гідроциліндра через канатні тяги показаний на рис. 1.13, в. Електродвигун 12 приводить насос 13, що харчує гідроциліндр 15, закріплений на рамі грейфера 16; до кінця телескопічного штока 14 гідроциліндра прикріплений канат 11, що обгинає блок 10 і закріплений у крапці А до щелепи. 9. При висуванні штока 14 відбувається змикання щелеп (зачерпування), при цьому захоплюваний вантаж (колоди, труби) стискає канат 17. При підйомі навантаженого грейфера відбувається притиснення вантажу вниз цим канатом, що охороняє випадання його із зева щелеп. Грейфери з гідроприводом у вигляді неповноприводного двигуна мають значно менше по висоті габарити. У цих грейферах можливе використання одного гідро - двигуна для обох щелеп (рис. 1.13, г) або двох гідродвигунів на кожну щелепу (рис.1.13, д). У грейфері з одним гідродвигуном одна щелепа 18 через важелі 19 з'єднана з віссю лопати, а інша через важелі 20 з корпусом двигуна. При подачі рідини в порожнині Б відбувається закриття щелепи, а при подачі в порожнину В — розкриття.
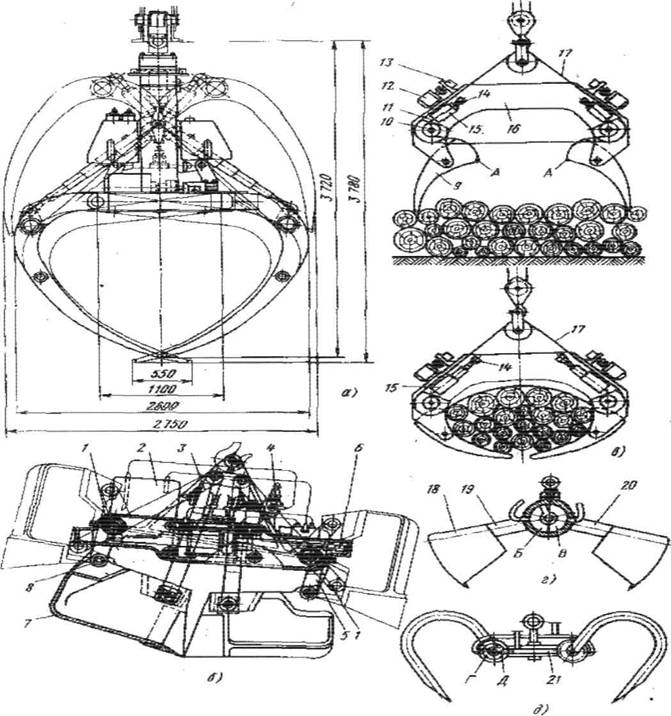 Рис 1.13 . Електрогідравлічні грейфери:
Рис 1.13 . Електрогідравлічні грейфери:
а — з телескопічними гідроциліндрами й перехресними щелепами; б — з рейковим приводом щелеп; в — з канатно-гідравлічним поворотом щелеп; г - неповноприводнии з одним лопатевим гідродвигуном; д - неповно-приводний і з двома гідродвигунами.
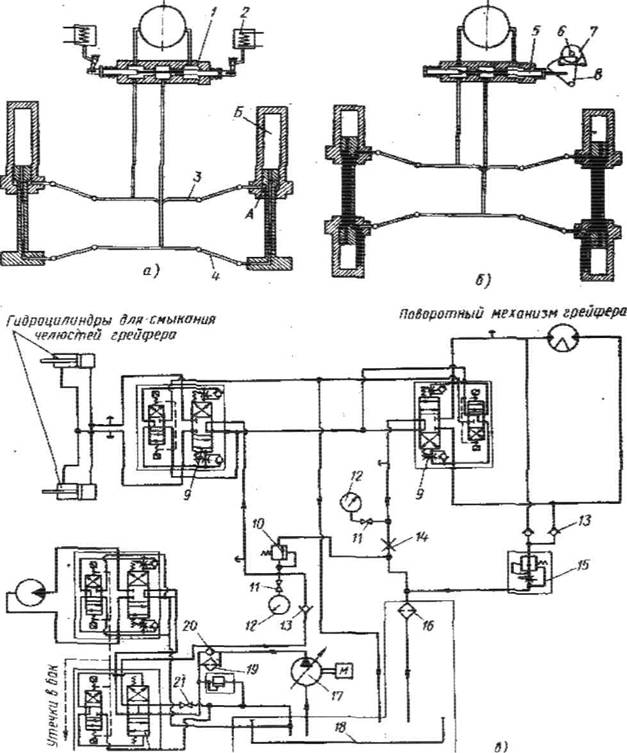
Рис 1.14. Гідравлічні схеми грейферів:
а - з одноштоковим гідроцилнндром; б - із двоштоковим гідроциліндром, в — з гідравлічним механізмом повороту; 1 - золотниковий гідророзподільник; 2 - електромагніт; 3,4- шланга; 5 - шток гідроциліндра; 6 - зубчасті шестірні; 7 - електродвигун; 8 - сектор; 9 - золотниковий розподільник; 10 - запобіжний
клапан; 11 - кран; 12 - манометр; 13,20 - зворотний клапан; 14- дросель-на шайба; 15 — дросель; 16,19 — фільтри; 17 - насос; 18 ~ масляний.
1.2 Грейфери для круглих лісоматеріалів розроблених на кафедрі механізації лісового господарства НУБіПу.
1.2.1 Конструкція грейфера за а. с. № 000
Винахід відноситься до вантажозахватним пристроям навантажувально-розвантажувальних машині може застосовуватися в різних галузях промисловості при вантаженні-розвантаженні круглих матеріалів, переважно лісоматеріалів. Відомі грейфери для круглих матеріалів, переважно лісоматеріалів, маючі траверсу, що несе щелипи, і механізм замикання щелеп. Проте конструкція і кріплення щелеп у відомих грейферах забезпечує зниження зусиль на впровадження останніх у вантаж тільки в початковий момент зачерпування, що знижує ефективність застосування таких грейферів. Мета винаходу - зниження зусиль на впровадження грейфера в лісоматеріал. Це досягається тим, що кожна щелепа грейфера виконана складеною з двох частин, сполучених між собою в одному місці шарнірно, а в іншому - за допомогою пружини. З метою регулювання параметрів пружини, остання закріплена за допомогою регулювального гвинта.
На кресленні схематично зображений проектуваний грейфер. Носова частина 1 щелепи з'єднується з напірною частиною 2 шарніром 3, регулювальним гвинтом 4 і пружинами 5 і 6. Напірні частини щелеп приєднані шарнірно до каркаса грейфера. Привід щелеп здійснюється через тяги 7 і траверсу 8 за допомогою гідроциліндра 9, шток якого рухається в направляючих 10. При будь-якому зіткненні з круглим матеріалом, наприклад, з колодою, під дією моменту, створюваного силами опору і активними силами впровадження, носова частина 1 щелепи, стискаючи пружини 5 і 6, повертаючись в ту або іншу сторону навколо
шарніра 3, обходячи перепони. Після обходу перепон, під дією енергії, акумулюючої в стислих пружинах, носова частина щелепи повертається в первинне положення, переміщаючи матеріал усередині грейфера і знижуючи при цьому сили опору матеріалу. Параметри пружин (попередній стиск, робоча деформація, величина амортизує-мого навантаження, жорсткість і ін.) вибирають виходячи з фізико-механічних властивостей матеріалу і можуть змінювати регулювальним гвинтом.
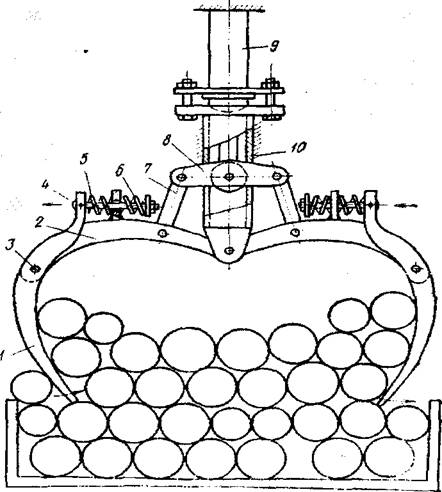
Рис. 1.15 Схема конструкції грейфера за а. с. 416304 ( автор М)
1.2.2 Грейфер для круглих матеріалів за а. с. № 000
Мета винаходу - поліпшення експлуатаційних характеристик шляхом зни-ження опору зачерпування. Винахід містить приводні щелепи 1, на кожній з яких за допомогою матриці 7 з різьбленням закріплений наконечник 3, що містить трос 4, покритий шаром гуми 5, металеву кінцеву частину 6. При роботі грейфера пружний наконечник легко обходить перепони, що знижує опір зачерпування 1. Винахід відноситься до підйомно-транспортного машинобудування, а саме до грейферів, призначених для вантаження колод, труб і інших круглих матеріалів. На кресленні зображена щелепа грейфера. Грейфер містить закріплені на траверсі за допомогою тяги (не показані) приводні щелепи 1, виконана кожна у вигляді серпа з площею поперечного перетину, що зменшується, до нижньої частини. На кінці щелепи є стержень 2 з різьбленням, з яким сполучений наконечник 3. Наконечник містить трос 4 змінні перетини, покритий шаром гуми 5, і металеву кінцеву частину 6. Трос 4 сполучений з матрицею 7 конічної форми, - причому кожна частинка торса розпущена з пасм і кінець її загнутий на кут 270-320°. Радіус гибки проволочок складає 5-10 мм. Трос має вид ступінчатого циліндра.
На зовнішній поверхні матриці 7 виконані лиськи 8 під ключ. Між торцевою час-тиною матриці, зверненої до щелепи 1, встановлений набір регульованих прокладок 9 і стопорна шайба 10, один внутрішній вус якої входить в паз 11, виконаний на стержні 2, а інший, зовнішній, загибається на лиську 8 матриці. Кінцева частина 6 має сферичну вершину. Грейфер працює наступним образом. При будь-якому зіткненні з круглим матеріалом, наприклад з колодою, під дією сили тяжіння грейфера і напірного зусилля стріли унаслідок незначної подвздовжньої жорсткості наконечника відбувається втрата стійкості і вигин в будь-яку сторону. Після цього на колоду діє наконечник, а потім і безпосередньо матриця 7 і щелепа 1. Завдяки високій податливості в подовжньому напрямі наконечник 3 щелепи легко обходить перепони, менше деформує і пошкоджує завантажувальний матеріал. Після обходу завантажувальної колоди, що перешкоджає впровадженню щелепи в пакет, наконечник займає своє первинне положення, підштовхуючи колоду всередину (а в окремих випадках назовні) грейфера і знижуючи при цьому силу опору завантаження. При повному завантаженому грейфері щелепи сходяться до такого положення, коли пружних елементів розташовуються за щелепами і тиск колод, що піднімаються, передається тільки на щелепи.
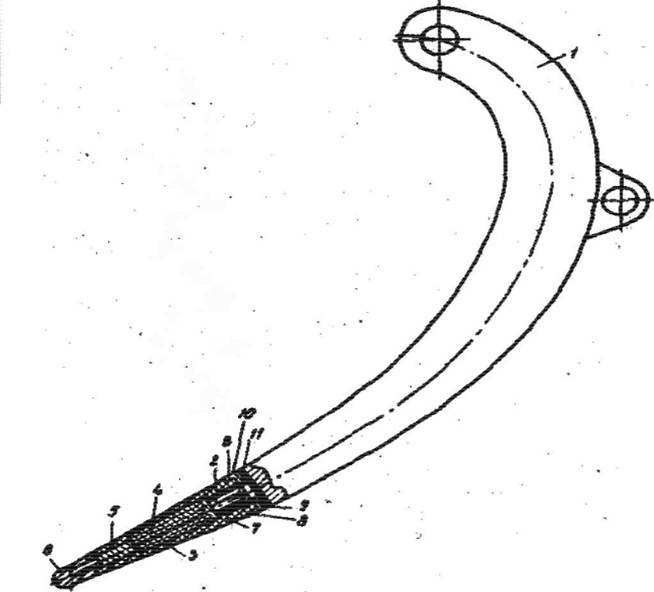
Рис. 1.16 Схема конструкції грейфера за а. с. 1516451 (автор , і )
1.2.3 Підвіска грейфера для лісоматеріалів за а. с. № 000
Винахід відноситься до підвісок вантажозахватних пристроїв навантажувально-розвантажувальних машин і може бути застосовано в різних галузях промисловості, сільського і лісового господарства, зокрема при навантажуванні - розгрузці лісоматеріалів.
Мета винаходу - поліпшення експлуатаційних можливостей шляхом фіксації порожнього грейфера на стрілі вантажопідйомної машини. Підвіска грейфера містить платформу 4, підвішену на похилих гнучких ланцюгах 6 до стріли 7 вантажопідйомної машини. На верхній частині платформи встановлений упор 5 у формі сфери. На стрілі розміщена опорна плита 8, сферичне гніздо якої сопряжено з опором, при цьому радіус сферичного гнізда відповідає радіусу сферичного опору. Пристрій облаштовано гнучкою під пружиною тягою 9 регульованої довжини, один кінець якої сполучений з верхньою частиною упору, а інший через отвір в центрі гнізда сполучений із стрілою посредством різьбового пальця 10 і пружини 11. На кресленні зображена схематично підвіска грейфера. До складу підвіски грейфера входять щелепи 1, гідроциліндр 2 управління щелепами, механізм 3 поворота грейфера, підвісна платформа 4. На верхній площині платформи 4 виконаний упор 5 з радіусом, залежним від вели чини вантажопідйомності грейфера. Платформа 4 за допомогою чотирьох похилих ланцюгів 6 підвішена до стріли 7. У стрілі 7 закріплена опорна плита 8 з гніздом, що має в центрі скрізьний отвір. Гніздо виконане з антифрикційного матеріалу і може бути секційним. Радіус гнізда відповідає радіусу опору 5. Розміри контактуючих сферичних поверхонь 3 опори 5 і гнізда визначені з умови питомого тиску, що допускається, і залежать від вантажопідйомності механізма і пари тертя матеріалів. На поверхнях сфер можуть бути нанесені елементи, що дозволяють збільшити фрикційну стійкість деталей. До верхньої частини опори 5 прикріплена гнучка тяга 9, наприклад ланцюг, сполучений із стрілою за допомогою різьбового пальця 10 і пружини 11, зусилля стиснення якої регулюється гайкою 12. Пружина спирається на стрілу. Початкова усадка пружини 11 повинна забезпечувати замикання контактуючих сферичних опори 5 і опорної плити 8 за відсутності вантажу в щелепах грейфера. Пристрій працює наступним чином.
Оператор стрілою 7 і механізмом 3 повороту проводить наводку, грейфера на захоплюваний вантаж, - В цьому випадку підвіска грейфера за рахунок пружини 11, пальця 10 і гнучкої тяги 9 забезпечує фрикційне замикання опори 5 з наполегливою плитою Б. Таке з'єднання забезпечує стійке положення грейфера при наведенні його на вантаж і зниження витрат часу на захоплення вантажу. Під час захоплення вантажу використовується напірне зусилля стріли 7, що скорочує час і підвищує коефіцієнт наповнення грейфера.
Після захоплення матеріалу проводиться підйом грейфера з вантажем і поворот де місця вивантаження. При цьому пружина 11 підвіски грейфера стискається під дією сили тяжіння піднімаючого вантажу і грейфера, і контактуючі сферичні поверхні розкриваються, а вантаж і грейфер стають підвішеними на п'яти ланцюгах, чим досягається зниження динамічного навантаження на конструкцію підйомника при поворотах стріли і повороті грейфера з вантажем.
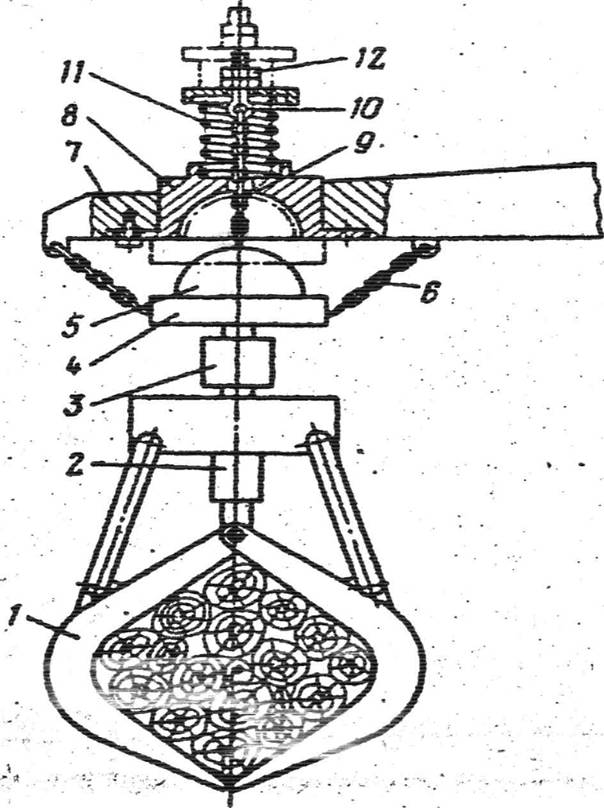
Рис. 1.17 Схема конструкції грейфера за а. с № 000 (, , )
1.2.4 Схема конструкції грейфера за патентом № 000
Винахід відноситься до вантажозахватних пристроїв підйомно-транспортних машин, зокрема до грейферів для круглих лісоматеріалів. Відомі грейферні механізми для круглих лісоматеріалів [, „Грейферные механизмы" М. Машиностроение. 1985], які включають траверсу, з якою з'єднані за допомогою тяг щелепи грейфера, гідро-, пневмо-, або гідроприводи. Для зниження опору при лобових зіткненнях носка щелепи з колодками і інтенсифікації процесу захоплення деревини розроблена конструкція грейфера з складними щелепами, передня частина яких зв'язана з напорною за допомогою шарнірно-пружних елементів [а. с. СРСР № В66СЗ/16]. Недоліком такого грейфера є те, що відхилення передньої частини щелепи при зустрічі з перешкодою вліво або вправо від розрахункової траєкторії, носить випадковий характер, внаслідок чого щелепа може значно відхилятися в той або інший бік від середнього положення, що приводить до переповнення захвату лісоматеріалами, або неповного закриття щелеп та інше. Винаходом ставиться завдання стабілізування траєкторії руху щелеп та зменшення енергомісткості процесу.
Поставлене винаходом завдання досягається тим, що у грейфері для лісоматеріалів, який включає траверсу з тягами, робочий гідроциліндр, дві щелепи, кожна з яких складається з двох попередньої і задньої напірної частини, з'єднаних між собою шарнірно, згідно винаходу передня частина кожної щелепи з'єднана шарнірно із задньою напірною за допомогою гідравлічного слідкувально-керуючого пристрою з сукупністю запобіжних і регулювальних каналів, який підключений паралельно до напірної магістралі робочого (основного) циліндра і який виконаний на основі гідравлічного пристрою золотникового типу і двох додаткових гідравлічних циліндрів, кожний з яких зв'язаний з нижніми (передніми) частинами щелеп з можливістю повороту останніх в залежності від лобового опору упровадження щелепи в штабель лісоматеріалів.
На фігурі приведена схема грейфера для лісоматеріалів. Грейфер для лісоматеріалів складається з двох щелеп, кожна з яких включає дві частини-передню 1 і напірну 2. Привід напірної частини щелепи 2 здійснюється за допомогою тяг і траверси 3 від гідроциліндра 4. До циліндра 4 паралельно підключені два слідкуючо-керувальні пристрої, кожний з яких включає такі елементи: гідравлічні клапани 5, 7, 9, 14, канали 6, 8, 10, 13. 15, золотник 12 з пружиною 11 і пазухою (камерою) А, допоміжний гідроциліндр 16, який включає поршень 17, пружину 18 і дві пазухи (камери) Б і В. Штоки допоміжних циліндрів 17 з'єднані з передніми частинами щелеп грейфера 1.
Грейфер для лісоматеріалів працює таким чином: при закриванні щелеп 2 грейфера, масло подається в безштокову пазуху основного гідроциліндра 4. Під час захоплювання колод можливе таке положення носка передньої частини щелепи, при якому він діаметральном впирається в колоду (лобове зіткнення). Внаслідок чого різко зростає опір переміщенню щелепи і тиск масла у всій напірній магістралі, а це зумовлює спрацювання запобіжного клапану 9 і масло по каналам 8 і 13 (при нейтральному положенні золотника 12) поступає в пазуху Б допоміжного гідроциліндра 16. Носок щелепи відводиться в сторону. У випадку неможливості такого переміщення із-за потужного бокового підпору сил опору, підвищується тиск в пазухах Б і В допоміжного гідроциліндру, каналу 8 і по всій нагнітаючій магістралі. Це призводить до відкриття клапану 14, який відрегульований на більший ніж клапан 9 тиск. Масло поступає в пазуху А золотника наглядаючого пристрою і переміщує золотник 12 ліворуч, за рахунок чого, масло нагнітається по каналу 8 в канал 15 і в пазуху В допоміжного циліндра 16. Переміщення носка щелепи 1 в цьому випадку відбувається в сторону зменшення траєкторії в середину грейфера. Масло з пазухи Б по каналам 13 і 10 крізь зворотній клапан 5 відводиться до зливника. Зливник 6 в цей час перекритий золотником 12. За час, коли відкритий перепускний клапан 9 та існує напір в каналі 8, зворотній клапан 7 зачинений, що запобігає витоку масла із пазухи А і повертання золотника в нейтральне положення.
Як тільки носок щелепи буде зміщений в бік від "мертвого" положення та відійде в напрямку меншого опору, тиск масла в нагнітаючій магістралі зменшиться, клапан 9 закриється і змикання щелеп триватиме внаслідок надходження масла в безштокову порожнину основного гідроциліндру 4. Повертання золотника 12 в первісне положення здійснюється пружиною 11..А крізь зворотний клапан 7, внаслідок відсутності підпору масла в каналі 8. При вивантаженні колод масло нагнітається в штокову порожнину головного циліндру 4. Зворотний клапан 5 перешкоджає надходженню масла в слідкувально-керуючий пристрій. Після розвантаження колод, пружина 18, повертає поршень гідроциліндру 16 в первісне положення. Масло із однієї порожнини перетікає в іншу крізь дросельний отвір в поршні 17 допоміжного циліндру. Винахід дає змогу стабілізувати траєкторію руху щелеп грейфера, зменшити енергомісткість технологічного процесу і продуктивність вантажопідйомних машин.
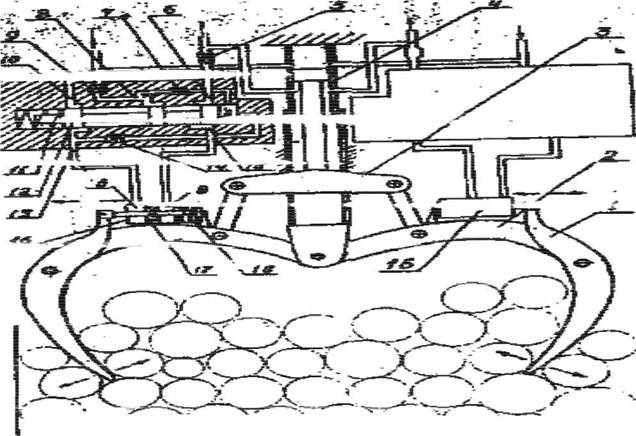
Рис 1.18 Схема конструкції грейфера за патентом № 000 ( автори: , )
1.2.5. Конструкція захвата за патентом № 000
Винаходом ставиться завдання спрощення конструкції пристрою для фіксації деревини в захваті, підвищення надійності утримання її під час руху агрегату зменшення енерго - і металомісткості. Поставлене винаходом завдання досягається тим, що начіпному захоплювачу, що містить раму, клешневий захват, синхронізуючу тягу і гідроциліндр приводу клешнів, згідно винаходу, додатково встановленнй гідромеханічний пристрій, який включає допоміжний гідроциліндр, паралельно підключений до основного, фіксатор і гребінку, яка з'єднана з клешнею захвату, а в гідросистемі обладнання додатково встановлені два регулюючі гідро клапани. На фігурі А приведена схема начіпного захоплювача, на фіг. Б приведено вид зверху основного гідроциліндра на фіг. А. Начіпне захоплювальне обладнання складається з рами 1, двох кленшів 2, основного гідроциліндру приводу клешнею 3, синхронізуючої тяги 4, гідромеханічного замка, який включає допоміжний циліндр 5, фіксатор 6, пружину 7 і гребінку 8, яка розташована на клешні 2 захвату. Для приводу основного гідроциліндру і гідромеханічного замка встановлена гідросистема, яка включає паророзподільник 9, основні гідропроводи 10 і Н допоміжні гідро-проводи 12 і 13, гідроклапани 14 і 15.Захоплювальне обладнання працює таким чином. Для захвату деревини робоча рідина за допомогою паророзподільника 9 подається спочатку через трубопровід 12 в нижню порожнину допоміжного циліндра 5 гідрозамка і подолавши опір пружини 7 підіймає фіксатор 6 від гребінки 8 і розблоковує клешні 2 захвату. Після досягнення певного тиску, - в трубопроводі відкривається клапан 14 і рідина подається в рукав 10 основного циліндру, розкриваючи клешні 2 і здійснюється захоплювання деревини. Дія затиснення вантажу робоча рідина подається в трубопровід И основного гідроциліндру, здійснюється затиснення пачки до повного зусилля, після чого автоматично відкривається клапан 15 і рідина подається в допоміжний гідроциліндр 5 гідромеханічного замка, фіксуючи за допомогою фіксатора 6 і гребінки 8 положення клешнею 2 захвату.
|
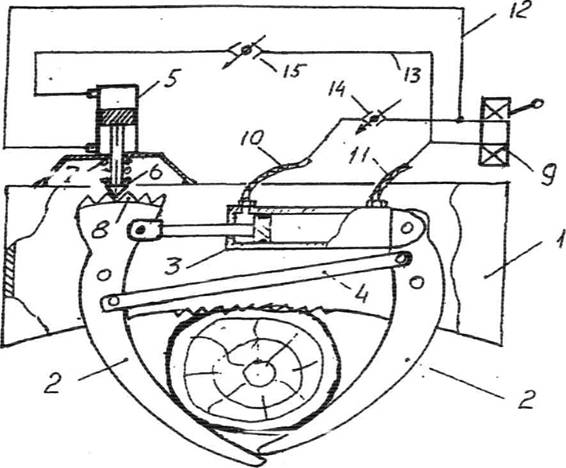
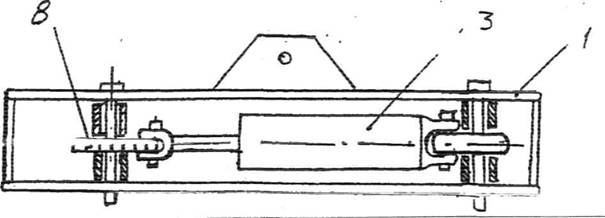
Рис. 1.19 А, Б: Схема конструкції захошіювачва для деревини за патернтом 54232 ( автори , )
1.3 Висновки і технічні завдання проекту
Навантажувольно - розвантажувальні роботи є одними з найбільш тудоміс-ними в лісовій промисловості та в інших галузях народного господарства. за оцінками різних спеціалістів на цих роботах зайнять від 20% до 30% робочої сили. В більшості випадків навантажувольно - розвантажувальні роботи застосовуються якості вантажно захватних пристроїв : стропи сталевого ланцюга або іншого типу, для обслуговування таких пристроїв потрібно три, чотири стропольшики. Ця робота також пов’язана з великою небезпекою ( падіння вантажу). Під час постачання споживачу лісових круглих матеріалів перевантажування на шляху доставки відбувається 3-4 рази тому перед кострукторами лісової галузі стоїть задача по розробці систем вантажо захватних механізмів для працівників та навантажувачів, які б могли дати змогу проводить навантажувольно - розвантажувальні роботи без засто-сування важкої праці і ризику стропольщиків. Одним з таких напрямків є впровадження в галузь грейферних захоплювачів. Зробивши відповідний аналіз грейферних механізмів ми при йшли до висновку, що значні розробки в цьому напрямку здійснюються на кафедрі механізації лісового комплексу НУБіПу. За останні роки тут було розроблено і експерементально перевірено ряд схем конструкцій і механізмів для круглих лісоматеріалів. Розглянувши ці конструкції ми вважаємо, що для нашої роботи заслуговує уваги конструкція за а. с. № 000 та № 000 та патенту 54231 тому у своїй роботі ми зробили аналіз таких механічних схем з метою обгрунтування параметрів конструкції.
Розділ II
2. Розрахунок параметрів грейферних механізмів
Залежно від виду вантажу (колоди, хлисти, тріска, ошурки і т. д.) застосовуються радіальні, торцеві, ковшові та інші типи грейферів. Вони можуть приводитися в дію від лебідки крана або від спеціального механізму, встановленого на самому грейфері (приводні грейфери).Існуюча методика розрахунку механізмів, грейферів, виходить з умови найбільшого вантаження робочих органів приводним механізмом. При цьому не враховуються вид вантажу, умови заповнення грейфера і ряд інших чинників, що впливають на величину зусилля на робочих органах. Захоплення лісових вантажів і заповнення ними грейферів є вельми складними і недостатньо вивченими процесами. Це утрудняє аналітичне визначення дійсного зусилля на щелепах грейфера залежно від різних чинників. Тому можна застосовувати спрощений метод розрахунку грейферів, при якому зусилля, що діють на робочий орган грейферів, визначаються при. захопленні вантажу.
2.1 Радіальні грейфери.
Радіальні грейфери знаходять застосування для захоплення круглих лісоматеріалів, хлистів і дерев. Основними параметрами радіального грейфера є: площа зіву замкнутого грейфера F3; відстань між важелями щелепи грейфера по довжині лісоматеріалу l3 маси грейфера mгр; величина розкриття щелеп L.Площа зіву грейфера визначається залежно від об'єму пачки і довжини лісоматеріалів по формулі
де ![]() - розрахунковий об'єм пачки;
- розрахунковий об'єм пачки;
![]() — середня довжина лісоматеріалів;
— середня довжина лісоматеріалів;
![]() — коефіцієнт повнодревесности пачки; Кп = 0,,7;
— коефіцієнт повнодревесности пачки; Кп = 0,,7;
К3— коефіцієнт заповнення площі зіву; К3 — 0,6...0,8.
На радіальних грейферах для збільшення коефіцієнта К3 і поліпшення умов захоплення пачки встановлюють вібраційні механізми; в цьому випадку К3 = 0,,9. Величина коефіцієнта К3 залежить від діаметру і довжини лісоматеріалів.
Для визначення розмірів поперечного перетину зіву грейфера слід задати формою перетину грейфера. При круглому або еліптичному перетині зіву грейфера найбільший діаметр перетину
 (1.2)
(1.2)
де С - прийняте відношення осей еліпса, С = 1,2 ... 1,4; для круглого перетину зіву С = 1, ![]() де
де ![]() — діаметр зіву.
— діаметр зіву.
Відстань між важелями щелепи грейфера вибирається залежно від довжини лісоматеріалу. Для хлистів і дерев ![]() приймається в межах 2 ... 2,5 м, для колод 1,2м.
приймається в межах 2 ... 2,5 м, для колод 1,2м.
Маса грейфера ![]() знаходиться в певній залежності від маси вантажу
знаходиться в певній залежності від маси вантажу ![]() , що піднімається, і визначається по формулі
, що піднімається, і визначається по формулі
![]() (1.3)
(1.3)
де ![]() — щільність деревини. Для радіального грейфера з вібраційним механізмом Кгр = 0,,25, а без нього Кгр = 0,,35. Тоді розрахунковий об'єм пачки, відповідно до підйомної сили крана Т, ф, складе
— щільність деревини. Для радіального грейфера з вібраційним механізмом Кгр = 0,,25, а без нього Кгр = 0,,35. Тоді розрахунковий об'єм пачки, відповідно до підйомної сили крана Т, ф, складе
 (1.4)
(1.4)
Пачка лісоматеріалів за допомогою грейфера формується таким чином. Спочатку грейфер під дією власної ваги упроваджується в штабель на деяку глибину. При цьому частина колод або хлистів піднімається над верхнім рядом, наповнюючи зів грейфера. Надалі, при стуленні щелеп, відбуваються стиснення захоплених круглих лісоматеріалів, перекочування і вертикальне переміщення їх. Якщо грейфер обладнаний вібраційним механізмом, процес формування пачки протікає в сприятливіших умовах. Невизначене розташування круглих лісоматеріалів в процесі формування пачки, а також сил взаємодії між ними утрудняє визначення зусилля на щелепах грейфера. З урахуванням нерівномірного завантаження щелеп при формуванні пачки (мал. 3.1 а), зусилля на щелепі можна визначити по формулі
![]() (1.5)
(1.5)
де Кн - коефіцієнт нерівномірності завантаження щелеп; Кн = 1,10 ... 1,15.
Зусилля N = Nb з урахуванням опору перекочуванню і витискування лісоматеріалів в процесі заповнення зіву грейфера при а = 0, ![]() :
:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
