
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
де N – кількість понять у блоці бази знань.
Відношення між ситуаціями, а також між ситуацією та рекомендацією U визначається за допомогою залежності між окремими поняттями, належними ситуаціям і рекомендаціям ( ):
):
 , (15)
, (15)
де ![]() – середнє відношення близькості між поняттями, які належать і-му та j-му критерію оцінки проблемної ситуації предметної області;
– середнє відношення близькості між поняттями, які належать і-му та j-му критерію оцінки проблемної ситуації предметної області; ![]() – кількість понять у і-му критерії оцінки проблемної ситуації предметної області;
– кількість понять у і-му критерії оцінки проблемної ситуації предметної області; ![]() – кількість понять у j-му критерії оцінки проблемної ситуації предметної області.
– кількість понять у j-му критерії оцінки проблемної ситуації предметної області.
Така нечітка модель зовнішнього середовища та механізму висновків знань інтелектуалізованих систем управління рухом суден в критичних ситуаціях орієнтована на роботу з декількома моделями предметних областей, що закладаються у відповідні блоки і можуть бути як взаємопов’язаними, так і відокремленими один від одного. Кожна модель будується на основі окремої семантичної мережі, а потім моделі поєднуються у єдину модель, що складає основу системи.
Введено поняття графу блоків інтелектуальної системи (BIS) під яким розумітимемо зв’язний неорієнтований граф без циклів, вершинами якого є блоки ITS (BIS), а дуги традиційно зв’язують блоки з іншими BIS вищого або нижчого рівнів.
У графі BIS виділені три типи вершин: початкова вершина BIS0, яка не має вхідних дуг, відповідає центральному блоку. Проміжні вершини – це вершини, що мають строго одну вхідну дугу і n вихідних дуг. Термінальні вершини – це вершини, які мають строго одну вхідну дугу і не мають вихідних дуг, що відповідає BIS найнижчого рівня підпорядкованості.
Розробка представленої логічної структури інтелектуалізованої системи управління ВТЗ у вигляді графу BIS дозволяє розробити структуру і зміст методу пошуку рішення на такій ITS. Рівень визначеності та достовірності знань обумовлює необхідність застосування нечітких підходів щодо розробки алгоритмів логічного виведення.
Вважатимемо, що окрема формальна система ФС є Н-системою (гільбертовського типу). Для бази фактів кожного блоку – BFi позначено через J(BFi) сигнатуру, що включає множину нелогічних символів. Визначено граф перетинів G=(V, Е, W), де множина V= {1,...,n} – є множина вершин, відповідних базам фактів BF, дві вершини i та j зв’язуються дугою, якщо J(BFi) і J(BFj) мають загальні символи![]() .
.
Зроблено висновок, що відомий алгоритм Message-Passing не дає можливості здійснити виведення цільової формули Q, такої, що ![]() , тобто сигнатура цільової формули не належить цілком сигнатурі бази знань (БЗ) одного блоку. Тому, для подолання цієї невідповідності, пропонується наступний удосконалений алгоритм ІMP (improved Message-Passing), що розвиває і удосконалює алгоритм MP, стосовно баз знань ITS з урахуванням нечіткості.
, тобто сигнатура цільової формули не належить цілком сигнатурі бази знань (БЗ) одного блоку. Тому, для подолання цієї невідповідності, пропонується наступний удосконалений алгоритм ІMP (improved Message-Passing), що розвиває і удосконалює алгоритм MP, стосовно баз знань ITS з урахуванням нечіткості.
Запропоновано наступний алгоритм модернізованого нечіткого логічного виведення (Upgraded fuzzy inference). UFI-виведення – це логічне виведення, здійснюване від заданого BISi, з послідовним обходом всіх гілок підграфу BISi без об’єднання БЗ між сусідніми гілками, з подальшими поверненнями (у разі недосягнення мети), до тих пір, поки не будуть обійдені всі гілки даного підграфу. У разі UFI-виведення необхідно враховувати області дії аксіом і зміст баз фактів, тому схема виведення набуває вигляду (рис.3).
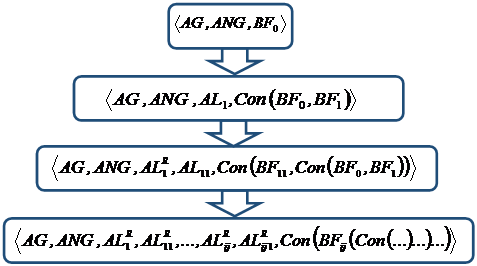
Рис. 3. Схема UFI-виведення:
![]() – поширювані вниз локальні аксіоми;
– поширювані вниз локальні аксіоми;
Соn – операція конкатенації баз фактів
З урахуванням інтерполяційної теореми визначаємо операцію конкатенації таким чином.
Нехай ВF – поточний стан бази знань процесу логічного виведення, що включає результати попередніх конкатенацій. Якщо процес логічного виведення досяг інтелектуального модуля i з базою даних ВFi то здійснюємо виведення в базі BF![]() ВFi всіх логічних формул, таких що
ВFi всіх логічних формул, таких що ![]() , де j – наступний в ланцюжку виведення (тобто за низхідною ієрархією для UFI-виведення) інтелектуальний компонент. Новий зміст ВF вважаємо рівним BF:=ВF
, де j – наступний в ланцюжку виведення (тобто за низхідною ієрархією для UFI-виведення) інтелектуальний компонент. Новий зміст ВF вважаємо рівним BF:=ВF![]() {
{![]() }, якщо {
}, якщо {![]() }=
}=![]() , то поточний стан ВF не змінюється.
, то поточний стан ВF не змінюється.
Запропоновані алгоритми логічного виведення в ITS реалізовані існуючими інструментальними засобами Visual Prolog 7.4.
У четвертому розділі „Рекомендації щодо застосування принципів інтелектуалізації експлуатації суден в критичних умовах. Перевірка достовірності розроблених моделей та методів” запропоновано рекомендації щодо застосування принципів інтелектуалізації експлуатації суден в критичних умовах; процедуру перевірки отриманих наукових результатів; методику оцінки ефективності функціонування ITS та оцінки впливу застосування інтелектуальної транспортної системи на вирішення завдань безпеки експлуатації судна на курсі.
Оцінку впливу застосування інтелектуальної транспортної системи (ступень відповідності за призначенням – ![]() ) на вирішення завдань безпеки експлуатації судна на курсі розглянуто для прикладі задачі визначення ширини смуги безпечної області навігації (БОН). Використані відомі емпіричні залежності щодо визначення ширини смуги з N ділянок різних фіксованих значень курсу для заданої гарантованої ймовірності РN знаходження судна у цієї області навігації
) на вирішення завдань безпеки експлуатації судна на курсі розглянуто для прикладі задачі визначення ширини смуги безпечної області навігації (БОН). Використані відомі емпіричні залежності щодо визначення ширини смуги з N ділянок різних фіксованих значень курсу для заданої гарантованої ймовірності РN знаходження судна у цієї області навігації
, (16)
де Z – половина ширини смуги БОН судна; ![]() ,
, ![]() – емпіричні коефіцієнти;
– емпіричні коефіцієнти;
ml, σl – параметри розподілу бокового відхилення від заданої траєкторії l.
Разом з тим, критичні умови експлуатації можуть поставити під сумнів ефективність прийнятих рішень в традиційних системах управління, що потребуватиме деякого уточнення параметра Z. Таким чином, визначення Z потребує врахування ефективності ITS, яка, в свою чергу, повинна збільшувати необхідну гарантовану ймовірність РN на величину, пропорційну величині ![]() .
.
Результати моделювання залежності Z від ефективності ITS EITS показані на рис.4.
|
![]()
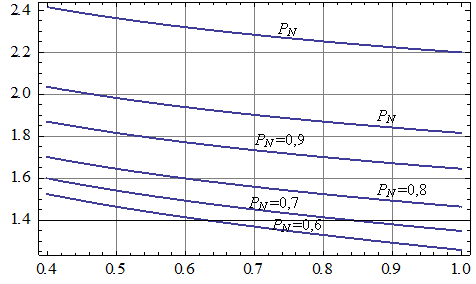 |
Рис. 4. Залежність ширини смуги БОН судна від ефективності ITS
Моделювання залежності Z від ефективності ITS ![]() при початкових параметрах N = 3, ml = 0,2 км, σl = 0,15 км,
при початкових параметрах N = 3, ml = 0,2 км, σl = 0,15 км,  ;
; ![]() та для різних значень РN = 0,4...0,99 свідчить про звуження ширини БОН судна зі зростанням ефективності ITS приблизно на 10...20 % при
та для різних значень РN = 0,4...0,99 свідчить про звуження ширини БОН судна зі зростанням ефективності ITS приблизно на 10...20 % при ![]() .
.
Суть оцінки ефективності інтелектуалізованої системи обрано в порівнянні якості рішень, прийнятих оператором без інтелектуалізованої системи або з її використанням. Оцінку ефективності роботи інтелектуалізованої системи судна виконано на прикладі аналізу алгоритму дії рульового високошвидкісного водного транспортного засобу. Задача полягає у виборі оптимальних дій по управлінню судном при зміні курсу у нештатної ситуації.
Алгоритм рішення задачі, записаний в операторній формі, має вигляд
O1 O2 l1 ↑2 O3 O4 ↓1 l2 ↑3 O5 ↓2 l3 ↑8 O6 O7 ↓3 O8 O9.
Оцінку ефективності інтелектуалізованої системи проведено на основі імовірнісного графа алгоритму. Аналізуючи роботу оператора, виділена деякі сукупності елементарних операцій, об’єднаних загальною метою. Така сукупність операцій звичайно називається задачею. Задача має більш високий порядок класифікації, ніж елементарна операція. Кінцевою метою всякої діяльності є одержання корисного ефекту. Кінцева мета досягається поетапно, через вирішення часткових задач. Тому зроблено висновок про аналогію між алгоритмом рішення окремої задачі та алгоритмом діяльності оператора.
Часові й імовірнісні характеристики алгоритму (середній час mА і його дисперсія DA, імовірність безпомилкового виконання алгоритму РА) отримані на основі характеристик елементарних операцій шляхом подання алгоритму у вигляді зваженого орієнтованого графу алгоритму й використання методів її перетворення.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
