

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК
Хомічук В. А., канд. техн. наук, доц., І., канд. техн. наук (ДонНУЕТ, Донецьк)
ОПИС АЛГОРИТМУ РОБОТИ КІНЕМАТИКИ АПАРАТА ДЛЯ УКЛАДАННЯ ЦУКЕРОК В КОРЕКС
У статті наведено алгоритм роботи кінематики розробленого фірмою ТОВ «ВІВА-ЛТД» робота-маніпулятора для укладання цукерок в корекс в процесі дослідної експлуатації. Розроблено і реалізовано програмне забезпечення наведеного алгоритму в комп’ютерній математичній системі MathCAD.
Ключові слова: укладання цукерок, робот-маніпулятор, кінематика апарата, трипод, алгоритм.
Фірмою «ВІВА – ЛТД» вперше в Україні розроблено трипод – робот-маніпулятор марки ВВ-РМТ, який використовується для переміщень у високошвидкісному режимі [1]. Даний робот-маніпулятор призначений для захоплення та знімання виробів масою не більше 0,1 кг і укладання їх в задане місце, зокрема для укладання цукерок «АСОРТІ» в корекс із швидкістю 1 цикл в секунду. Дана конструкція має можливості здійснювати переміщення цукерки в трьох координатах, а також поворот цукерки в задане положення (рисунок 1).
Основна мета роботи трипода – автоматизувати трудомісткий процес укладання цукерок в корекс, замінивши ручну працю автоматичною системою.
Для розпізнавання об'єкту і вибору місця укладання виробу використовується цифрова відеокамера, що дозволяє захоплювати об'єкти в потоці (на конвейєрі).
Програму управління апаратом розроблено на алгоритмічній мові програмування STL з використанням драйверів, написаних на мові С++.
|
|
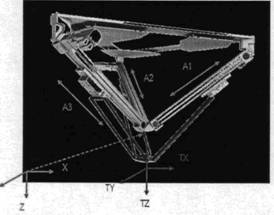
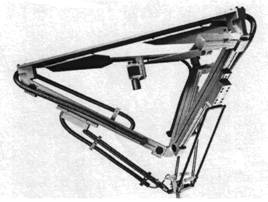
Рисунок 1 – Робот-маніпулятор ВВ-РМТ
Отже, триподом називається триосьова система позиціонування (робот), яка розробляється для автоматичного сортування цукерок, що йдуть по конвеєру. Складовими трипода в цілому є механічні системи, електронні й інформаційні системи, що об'єднані в одному пристрої. В процесі дослідної експлуатації необхідно в першу чергу забезпечити надійність виконання поставленої функціональної задачі. Як показано вище, трипод – типова мехатронна система – сукупність декількох мехатронних модулів і вузлів, синергетично пов'язаних між собою, для виконання конкретного функціонального завдання.
Особливістю мехатронної системи є наявність інформаційної складової, що включає різні програмні засоби. У програмній продукції відсутнє поняття фізичного старіння. Основна маса помилок – це помилки, що виникають при написанні програм. Крім того, постійне вдосконалювання мов програмування й методів програмування приводить до швидкого морального старіння програмного продукту. Тому важливим етапом дослідної експлуатації є супровід програмного забезпечення.
Питанням надійності програмного забезпечення присвячено розділ у роботі [2]. У цій роботі також розглянуто різні закони розподілу часу наробітку на відмову. Стверджується, що в електронних пристроях інтенсивність відмов з часом зменшується, однак це особливість програмних засобів. У роботі [3] розглянуто різні методи оцінювання надійності програмних засобів, у тому числі й багатофакторний експеримент. У роботі [4] висвітлено різні підходи до оціннювання надійності мехатронної системи в цілому, однак передбачається, що механічні системи, електронні системи й програмні засоби з'єднаноі послідовно за структурною схемою надійності. Такий підхід спрощує розрахунки, хоча і не враховує синергетичних зв'язків між системами. Показано, що відомий розподіл Вейбулла дозволяє оцінювати надійність всіх складових мехатронної системи.
Метою статті є аналіз алгоритму функціонування кінематичного модуля трипода для подальшого використання в оцінюванні надійності всіх механічних систем, електронних систем і програмних засобів.
Спочатку визначимося з назвами складових трипода:
– ребра рами трипода – рівносторонній трикутник, до вершин якого кріпляться одним кінцем напрямні;
– напрямна – це пряма, по якій рухається каретка;
– каретка – шарнірно зв'язана з тягою деталь, яка переміщується по напрямній;
– тяга – штанга, зв'язана одним кінцем з кареткою, а іншим – із захоплювачем;
– захоплювач – виконавчий пристрій прикріплений до всім трьох тяг.
Отже, складовими трипода є: 3 ребра з однаковими довжинами, 3 напрямних з однаковими довжинами й 3 тяги, довжини яких теж рівні (рисунок 2).
На першому етапі метою нашого дослідження є: знаючи координати (x, y, z) захоплювача в просторі, необхідно визначити відстані, які пройдуть каретки по 3-м напрямним. Початок відліку шуканих довжин, приймемо в точках перетину ребер з напрямними.
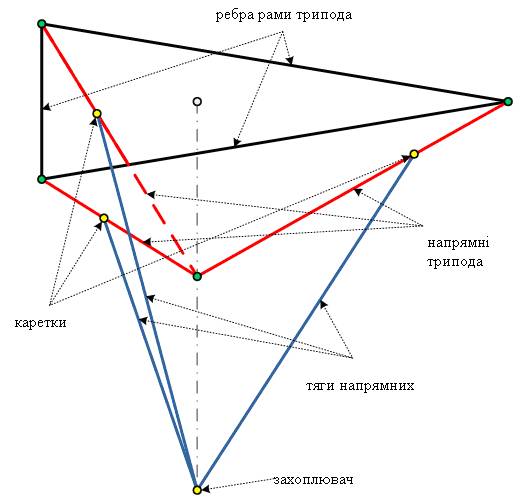
Рисунок 2 – Складові трипода
Для успішного виконання поставленого завдання необхідно правильно вибрати систему координат, її центр і напрямок осей x, y, z. Приймемо за центр системи координат (0; 0; 0) точку в основі піраміди, утвореної ребрами й напрямними. Вісь z направимо перпендикулярно до основи, вона буде проходити через точку перетину напрямних. Вісь x направимо так, щоб вона збігалася із проекцією однієї з напрямних, вісь y відповідно перпендикулярно.
Довжини ребер, напрямних і тяг трипода у нас чітко визначено, так само нам відомо і точки перетину напрямних та ребер. Також нам відома точка в просторі (визначається камерою), у якій розташовано необхідний для захоплення об'єкт.
Введемо для зручності позначення довжин:
lR – довжина ребра в основі трипода;
lN – довжина напрямної;
lT – довжина тяги;
Позначення необхідних для розрахунків точок і координат:
N (0, 0, 0) – початок у системі координат;
K (x, y, z) – координати точки в просторі, у якій розташовано необхідний для захоплення об'єкт;
– початкова точка перетину напрямних (вершина піраміди, де z0 – висота);
– початкова точка перетину 1-го ребра і 1-ої напрямної;
– початкова точка перетину 2-го ребра й 2-ої напрямної;
– початкова точка перетину 3-го ребра й 3-ої напрямної.
Всі описані вище дані нам відомі. З відомої точки ![]() будуть виходити тяги трипода, які перетинатимуть напрямні в невідомих для нас шуканих точках; позначимо ці точки і їхні координати відповідно:
будуть виходити тяги трипода, які перетинатимуть напрямні в невідомих для нас шуканих точках; позначимо ці точки і їхні координати відповідно:
– шукана точка перетину 1-ої тяги і 1-ої напрямної;
– шукана точка перетину 2-ої тяги і 2-ої напрямної;
– шукана точка перетину 3-ої тяги і 3-ої напрямної.
Шукані довжини позначимо як:
ΔL1 – відстань, що повинна пройти 1-а каретка з 1-ою тягою по 1-ій напрямній для досягнення шуканої точки K (x, y, z);
ΔL2 – відстань, що повинна пройти 2-а каретка з 2-ою тягою по 2-ій напрямній для досягнення шуканої точки K (x, y, z);
ΔL3 – відстань, що повинна пройти 3-а каретка з 3-ою тягою по 3-ій напрямної для досягнення шуканої точки K (x, y, z);
![]() – задана похибка визначення ΔL .
– задана похибка визначення ΔL .
Рисунок 3 – Позначення в системі координат
Для наочності, всі наведені дані позначено вище на рисунку 3. Така система позначень є зручною для подальшого запису алгоритму роботи кінематичного модуля робота-маніпулятора ВВ-РМТ.
Запишемо рівняння прямої в просторі, що проходить через дві точки:
 (1)
(1)
Відносно нашої початкової точки перетину напрямних і точки , рівняння прямої в просторі буде мати вигляд:
 (2)
(2)
де шукана точка , належить прямій, що проходить відповідно через точки 0 і 1.
Аналогічно для двох інших напрямних можна записати такі рівняння:
 (3)
(3)
 (4)
(4)
З рівняння прямої в просторі, знаючи одну з координат (наприклад x), визначаємо дві інші координати (y, z). Для знаходження шуканих точок i1, i2 та i3, будемо задаватися початковим значенням координати ix і з рівняння прямої в просторі, будемо знаходити координати iy і iz:
 ,
,  , (5)
, (5)
 ,
,  , (6)
, (6)
 ,
,  . (7)
. (7)
Точки, координати яких знайдено за формулами (5-7) будуть лежати на напрямних, але не відповідати дійсним шуканим точкам. Для перевірки чи задовольняють дані точки, шуканим, знайдемо довжини тяг від цих точок до точки в просторі, обумовленою камерою. Для знаходження довжини відрізка використовуємо формулу:
 (8)
(8)
Так як довжини тяг мають чіткі фіксовані розміри, то знайдена довжина буде або більше, або менше дійсної довжини тяги lT. Якщо знайдена довжина ilT > lT, то знайдена точка лежить вище шуканої точки, якщо ilT < lT, то знайдена точка лежить нижче на напрямній.
Всю довжину кожної напрямної, на якій буде лежати шукана точка, можна розбити на два рівних інтервали: від точки перетину ребра й напрямної (точки 1, 2, 3) до середини довжини напрямної й від середини до точки 0. Позначимо ці інтервали як t1 і t2. (рисунок 4). Будемо розглядати дані інтервали щодо осі x. Позначимо нижню точку інтервалу як sx а верхню як ex, тоді центром відрізка буде координата, рівна ![]() . Для 1-ої напрямної ex1 і sx1, для 2-ої і 3-ої – ex2 і sx2, ex3 і sx3, відповідно.
. Для 1-ої напрямної ex1 і sx1, для 2-ої і 3-ої – ex2 і sx2, ex3 і sx3, відповідно.
Рисунок 4 – Координати шуканої точки
Розглянемо послідовність операцій для 1-ої напрямної. Задамо початкові значення:
![]() , (9)
, (9)
![]() , (10)
, (10)
 . (11)
. (11)
За формулами (5), знаючи ix1 знайдемо iy1 та iz1:
Знаючи ix1, iy1 та iz1, знаходимо розрахункову довжину тяги ![]() з (8), і порівнюємо її з реальною довжиною lT. Перевіряємо, чи задовольняє обчислена довжина в нерівності:
з (8), і порівнюємо її з реальною довжиною lT. Перевіряємо, чи задовольняє обчислена довжина в нерівності:
(12)
де – задана похибка обчислень.
Якщо ![]() не належить шуканому діапазону, то продовжуємо обчислення, доти, поки умову (12) буде виконано.
не належить шуканому діапазону, то продовжуємо обчислення, доти, поки умову (12) буде виконано.
Отже, якщо ![]() > lT і
> lT і ![]() ≠ 0, то надаємо значення
≠ 0, то надаємо значення ![]() ,
,
якщо ![]() ≤ lT і
≤ lT і ![]() ≠ 0, то надаємо значення
≠ 0, то надаємо значення ![]() ,
,
де ix1 було обчислено вище за формулою (11).

Рисунок 5 – Програмна реалізація алгоритму роботи кінематики
Знаходимо знову ix1 за (11), і з (5) iy1 та iz1. Знаходимо довжину тяги ![]() і перевіряємо чи відповідає вона умові (12), повторюючи даний алгоритм доти, поки шукана довжина не досягне реальної.
і перевіряємо чи відповідає вона умові (12), повторюючи даний алгоритм доти, поки шукана довжина не досягне реальної.
Коли ![]() = lT ± ε, отже координати ix1, iy1 та iz1 було розраховано вірно, і з точністю ±ε можна визначити відстань, яку повинна пройти 1-а каретка – ΔL1. Аналогічно знаходяться ΔL2 і ΔL3.
= lT ± ε, отже координати ix1, iy1 та iz1 було розраховано вірно, і з точністю ±ε можна визначити відстань, яку повинна пройти 1-а каретка – ΔL1. Аналогічно знаходяться ΔL2 і ΔL3.
Вище на рисунку 5 наведено програмну реалізацію описаного алгоритму дихотомічного пошуку в комп’ютерній математичній системі MathCad.
Таким чином, в процесі дослідної експлуатації робота-маніпулятора підтверджено високу прийнятну надійність алгоритму роботи кінематичного модуля трипода та його програмного забезпечення. При організованому програмному супроводі регулярно видаляються помилки, і надійність програмних засобів в процесі дослідної експлуатації підвищується.
У подальшому планується розробити програму досліджень оцінювання надійності всіх складових модулів робота-маніпулятора, проаналізувати прийнятні підходи до оцінювання надійності пристрою в цілому, для чого розробити структурну схему надійності, що поєднує механічні, електронні системи і програмні засоби.
Література
5. Хомічук, В. А. До розробки апарата для укладання цукерок в корекс / В. А Хомічук, О. І. Бескровний // Обладнання та технології харчових виробництв: темат. зб. наук. пр. – Донецьк: ДонНУЕТ, 2011. – Вип. 27. – С. 98-105.
2. Локазюк ійність, контроль, діагностика і модернізація ПК: посібник / , . – К.: Академія, 2004. – 376 с.
3. Карповский программной продукции / , . – К.: Техника, 1990. – 160 с.
4. Никитин мехатронных систем / , // Автомобильный транспорт. – 2004. – №14. – Х. ХНАДУ. С. 56-60.
