

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Район обзора и его ориентация. |
| |
1.RANGE | -переключение шкал дальности; |
|
2. SET CENTRE | - смещение центра развертки; |
|
3. RESET CENTRE | - возврат центра развертки в начальное положение; |
|
4. BEARING | - selection of bearing presentation mode - |
|
ориентация изображения: |
| |
NORTH UP | - по меридиану; |
|
HEAD UP | - по курсу; |
|
COURSE UP | -по стабилизированному курсу. |
|
Качество изображения. |
| |
1. BRILL | -brilliance-яркость элементов изображения: |
|
RANGE RING | - fixed range rings - неподвижных колец дальности; |
|
VRM | - variable range marker - подвижного кольца |
|
дальности; |
| |
SYMBOLS | - символов, отображаемых на экране; |
|
CRT | - cathode ray tube - первичной РЛ-информации; |
|
MARKER | - маркера; • |
|
SCALE | - подсветки шкалы пеленгов; |
|
CHART | - изображения карты. |
|
2. GAIN | - receiver sensitivity adjustment - усиление |
|
видеосигнала; |
| |
3.SEA | - sea clutter suppression - подавление помех от моря; |
|
4. RAIN | - rain clutter suppression - подавление помех от дождя. |
|
Режимы движения и индикации. |
| |
1. MOTION | - true/relative mode of motion - режим движения: |
|
TRUE/M | - true motion - режим истинного движения; |
|
REL/M | - relative motion - режим относительного движения; |
|
2. VECTORS | - вид индикации перемещения: |
|
TRUE/V | - true vectors - истинные вектора; |
|
REL/V | - relative vectors - относительные вектора. |
|
Режим автосопровождения. |
| |
1. AUTO MODE | - режим автоматического обнаружения и |
|
автозахвата; |
| |
2. ACQUIRE | - ручной ввод на автосопровождение: |
|
TRG | - target - цели; |
|
F | - fixed point - неподвижного точечного ориентира; |
|
RT | - referance target - опорной цели, относительно |
|
которой вычисляются параметры сближения с |
| |
любой другой целью; |
| |
RP | - referance. point - опорной точки, относительно |
|
которой вычисляются дистанция и пеленг | ||
координатного маркера; | ||
3. RELEASE TARGET | - снятие с автосопровождения цели отмеченной | |
координатным маркером; | ||
4. AUTO PARAM | - automode parameters - параметры зоны | |
автозахвата. Конфигурация зоны может быть | ||
различной. Когда поиск ведется в носовом | ||
секторе: | ||
FRNGL | - forward range limit - отстояние границы зоны | |
поиска впереди по курсу; | ||
SECTOR | - сектор поиска. | |
5. BARRIER | - режим построения линий запрета захвата. | |
Длялценки ситуации. | ||
1. SAFE LIMIT | -параметры зоны безопасности: | |
СРА | - closest point of approuch - минимальное | |
расстояние до точки кратчайшего сближения; | ||
ТСРА | - time to closest point of approuch - Время до | |
точки кратчайшего сближения; | ||
2. VECTOR LENGTH | - время экстраполяции движения целей; | |
3. GUARD RING | - зона охранного кольца; | |
4. SECTOR/D | - sector of dengerous courses - сектор опасных | |
курсов; | ||
5. TRACK HISTORY | - следы целей; | |
6. TARGET DATA | - данные цели: | |
TGT | - target - номер цели; | |
TBRG | - target bearing - пеленг цели; | |
TRNG | - target range - расстояние до цели; | |
THDG | - target heading - курс цели; | |
TSPD | - target speed - скорость цели; | |
СРА | - closest point of approuch - расстояние до точки | |
кратчайшего сближения; | ||
ТСРА | - time to closest point of approuch - время до | |
точки кратчайшего сближения; | ||
CCP | - calculated closest point - расчетное расстояние до | |
точки кратчайшего сближения. | ||
TCCP | - time to calculated closest point - расчетное время до | |
точки кратчайшего сближения; | ||
7. EBL | - electronic bearing line - электронный визир для | |
измерения пеленгов; | ||
ERBL | - electronic range and bearing line - электронная | |
визирная линейка для измерения пеленгов и | ||
расстояний: | ||
CENTER | - начало визира в центре экрана; | |
INDP | - display of EBL (ERBL) from trackball cursor | |
mark independently - начало визирной линии с | ||
места установки маркера. | ||
1. TRIAL 2. ТТМ 3. MANOEUVTYPE l. COLLWARN 2.LOSTTRG 3.NEWTRG 4. SYS WARN | Режим проигрывания маневра. - trial manoeuvre - режим проигрывания маневра. - - time to manoeuvre - время до начала маневра, - - вид проигрываемого маневра. Сигнализация. - collision warning - опасно сближающаяся цель; - - lost target - сброс цели с автосопровождения; - - new target - появление новой цели при автозахват - - system warning - неисправность. |
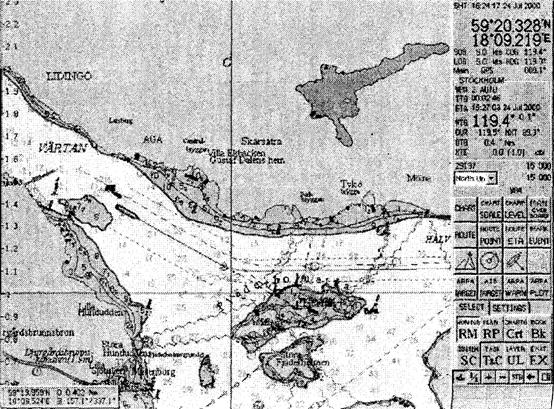
Вид векторной карты в системе "dKart Navigator".
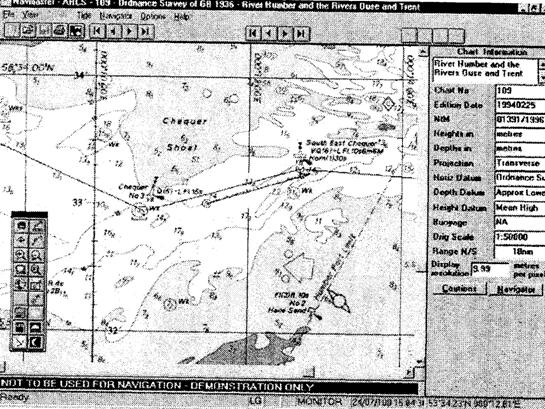
ПРИЛОЖЕНИЕ 5 Вид растровой карты в системе "Navmaster"
ОГЛАВЛЕНИЕ.
Введение.....................:............................................. | 3 |
Электронные карты................................................... | 6 |
1.1. Классификация электронных карт............................... | 6 |
1.2. Геодезическая основа отсчета координат ЭК.................. | 10 |
1.3. Разграфка электронных карт....................................... | 13 |
1.4. Проекции морских навигационных электронных карт...... | 14 |
1.5. Формат для обмена картографической информацией....... | 19 |
1.6. Отображение ЭК на экране дисплея............................. | 21 |
1.7. Корректура электронных карт.................................... | 23 |
Понятие о навигационно-ипформациопных | |
компьютерных системах.............................................. | 26 |
2.1. НИКС как центральная система автоматизированных | |
комплексов судовождения......................................... | 26 |
2.1.1 .Структура и назначение АКС........................................... | 26 |
2.1.2. Основные принципы построения АКС............................... | 29 |
2.1.3. Обеспечение АКС........................................................ | 32 |
2,2. Техническое обеспечение и виды НИКС........................ | 33 |
2.3. Информационно-программное обеспечение НИКС......... | 36 |
2,3.1 .Картографическая база данных........................................ | 36 |
2.3.2.Другие базы данных...:.................................................. | 38 |
2.3.3. База программ............................................................ | 39 |
2.3.4. Система управления базами данных................................. | 39 |
2.3.5. Справочная система НИКС............................................. | 41 |
1А. Лингвистическое обеспечение НИКС........................... | 43 |
1.5. 0 НИКС как о центре судовой информационной сети | 50 |
Функциональные возможности НИКС........................... | 52 |
3.1. Функциональные возможности ECDIS.......................... | 52 |
3.1.1. Работа с каталогом карт и с картами................................. | 52 |
3.1.2. Планирование пути...................................................... | 53 |
3.1.3. Счисление, обсервации, прокладка пути........................... | 55 |
3.1.4. Контроль прохождения маршрута................................... | 57 |
3.1.5. Контроль навигационной безопасности............................ | 57 |
3.1.6. Функции для использования радиолокационной информации.. | 59 |
3:1.7. Регистрация информации............................................... | 60 |
3.1.8. Предоставление дополнительной информации................... | 61 |
3.1.9. Решение дополнительных задач...................................... | 62 |
3.1.10. Поддержание баз данных на уровне современности и обмен | |
данными................................................................... | 63 |
3.1.11. Управление движением судна....................................... | 63 |
3.1.12. Другие функции......................................................... | 64 |
3.2.0 функциональных возможностях растровых НИКС........ | 65 |
4. Анализ информации основных внешних навигационных | |
датчиков НИКС......................................................... | 68 |
4.1. Основные навигационные характеристики датчиков | |
информации........................................................... | 68 |
4.2. Курсоуказатели и лаги.............................................. | 69 |
4.3. Анализ информации СНС.......................................... | 71 |
4.3.1. Преимущества совместной работы НИКС со спутниковыми | |
навигационными системами............................................ | 71 |
4.3.2. Краткая характеристика GPS и ее погрешностей.................. | 72 |
4.3.3. Краткая характеристика системы «ГЛОНАСС» ................... | 75 |
4.4. Информация радиолокатора и САРП........................... | 77 |
4.5, Автоматические идентификационно-информационные | |
системы................................................................. | 79 |
4.5.1. Назначение АИС, ее режимы работы. Документы, | |
определяющие использование АИС в судовождении............ | on 6U |
4.5.2. Аппаратура АИС.......................................................... | 0 1 61 |
4.5.3. Функции АИС, предоставляемые сведения, частота | |
обновления данных....................................................... | Q^ 6J |
4.5.4. Достоинства АИС......................................................... | fi< 6Э |
4.5.5. Ограничения АИС........................................................ | 88 |
5. Недостатки, ограничения и погрешности ECDIS.............. | 89 |
5.1. Понятие об источниках погрешностей ECDIS................. | 89 |
5.2. Погрешности устройств цифрования карты и средств ее | |
n'mfin'Tfl/'puiTCT | 89 |
5.3. Неточность картографических данных.......................... | 90 |
5.4. Погрешности, обусловленные ошибками датчиков | |
информации........................................................... | 92 |
5.5. Погрешности от использования различных координатных | |
систем.................................................................. | 92 |
5.6. Погрешности интерпретации данных ECDIS. Риск | |
передоверия............................................................ | 93 |
6. Технико-эксплуатационные требования к ECDIS............ | 95 |
61 l-T'ttTJT'^l-TPlTlfP | 95 |
6.2. Данные ЭК и их структура........................................ | 95 |
6.3. Ориентация изображения, режим движения, другая | |
информация........................................................... | 97 |
6.4. Цвета и символы. Требования к дисплею...................... | 97 |
6.5. Предварительная прокладка...................................... | 98 |
99 | |
6.7. Регистрация данных. Сигнализация и индикация............ | 100 |
6.8. Точность. Сопряжение с другой аппаратурой................. | 102 |
Список литературы........................................................ | 103 |
ПРИЛОЖЕНИЕ 1, Список горизонтальных датумов............... | 104 |
ПРИЛОЖЕНИЕ 2: Список горизонтальных датумов карт Британского адмиралтейства........................................ | 107 |
ПРИЛОЖЕНИЕ 3. Некоторые английские сокращения, используемые в навигационно-информационных компьютерных системах ............................................. | 108 |
ПРИЛОЖЕНИЕ 4. Вид векторной карты в системе "dKart Navigator"................................................................ | 116 |
ПРИЛОЖЕНИЕ 5. Вид растровой карты в системе "Navmaster"... | 117 |

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
