
Часто один і той самий сигнал генератора використовується для калібрування каналу вертикального відхилення (калібрування коефіцієнта відхилення по амплітуді сигналу) і каналу горизонтального відхилення (калібрування коефіцієнта розгорнення за часом).
4. Цифрові осцилографи
Один з основних напрямків удосконалювання осцилографів заснований на широкому використанні в їхніх схемах цифрових методів обробки сигналів і мікропроцесорів. Структура побудови сучасного цифрового осцилографа залежить від обсягу й характеру функцій, покладених на використовувану мікропроцесорну систему.
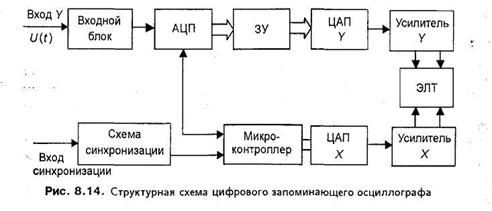
Порівняно проста схема цифрового осцилографа представлена на рис. 14. Це цифровий запам'ятовуючий осцилограф (ЦЗО) .
У момент ![]() по команді мікроконтролера (МК) в АЦП починається перетворення вступника на його вхід напруги
по команді мікроконтролера (МК) в АЦП починається перетворення вступника на його вхід напруги ![]() . У результаті напруга
. У результаті напруга ![]() перетвориться в числовий код і записується в чарунку запам'ятовувального пристрою ЗП. Процес запам'ятовування значень
перетвориться в числовий код і записується в чарунку запам'ятовувального пристрою ЗП. Процес запам'ятовування значень ![]() триває до заповнення призначених для цього чарунок пам'яті ЗП. При необхідності по команді МК із пам'яті ЗП в певній послідовності вибираються числа й подаються на ЦАП, де перетворяться у відповідні напруги
триває до заповнення призначених для цього чарунок пам'яті ЗП. При необхідності по команді МК із пам'яті ЗП в певній послідовності вибираються числа й подаються на ЦАП, де перетворяться у відповідні напруги ![]() . Далі ці напруги через прикінцевий підсилювач подаються на вертикально відхиляючі пластини. У результаті при наявності розгорнень на екрані відображається послідовність світних крапок, а при наявності блоку інтерполяції - розгорнута осцилограма.
. Далі ці напруги через прикінцевий підсилювач подаються на вертикально відхиляючі пластини. У результаті при наявності розгорнень на екрані відображається послідовність світних крапок, а при наявності блоку інтерполяції - розгорнута осцилограма.
Функції генератора розгорнення в даній схемі може виконувати ЦАП, керований сигналами, що надходять на його вхід від мікроконтролера. На виході ЦАП утвориться східчасто змінююча напруга, близька до лінійно змінюючої. Швидкість розгорнення при цьому визначається швидкодією ЦАП і мікроконтролера.
Сучасні ЦЗО забезпечують практично необмежений час зберігання інформації, можливість відтворення ділянок сигналу, що запам'ятовується. Разом з тим невисока швидкодія АЦП обмежує максимальну частоту досліджуваних сигналів (40 Мгц).
Більше широкі можливості мають цифрові осцилографи із програмним керуванням на основі мікропроцесорних систем. Структура таких осцилографів подібна до структури обчислювальних машин (рис.15).
![]()
![]()
![]()
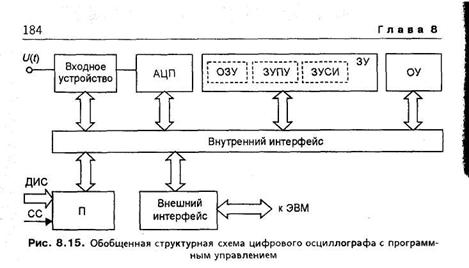
Досліджуваний аналоговий сигнал ![]() надходить на вхідний пристрій, де здійснюється узгодження його параметрів з АЦП, а також автоматичне перемикання каналів при багатоканальному осцилографуванні. Крім того, тут за допомогою вбудованих вимірників можуть визначатися амплітудні й тимчасові параметри досліджуваного сигналу.
надходить на вхідний пристрій, де здійснюється узгодження його параметрів з АЦП, а також автоматичне перемикання каналів при багатоканальному осцилографуванні. Крім того, тут за допомогою вбудованих вимірників можуть визначатися амплітудні й тимчасові параметри досліджуваного сигналу.
Після АЦП послідовність кодів інформативних параметрів сигналу через внутрішньо приладовий інтерфейс подається в ЗП, що, як правило, включає у свій склад:
- оперативний запам'ятовувальний пристрій (ОЗП), що володіє високою швидкістю запису сигналів, що випливають із частотою дискретизації;
- запам'ятовувальний пристрій програм керування (ЗППК), забезпечуваючий зберігання програм математичної й логічної обробки результатів вимірів і програм керування осцилографом;
- запам'ятовувальний пристрій службової інформації (ЗПСІ), призначений для зберігання виведеної на екран числено-буквеної й іншої знакової інформації.
Із ЗУ сигнали надходять у процесор П, що відображає пристрій або через зовнішній інтерфейс на зовнішні пристрої й ЕОМ.
Як процесор у цифровому осцилографі можуть використовуватися мікропроцесорні комплекти, а також мікро - і міні ЕОМ. Наявність мікропроцесорної системи дозволяє повністю автоматизувати роботу осцилографа. Процесор здійснює вибір і завдання режимів роботи осцилографа, обробку результатів виміру, зв'язок осцилографа з оператором і зовнішніми пристроями й інші операції.
На відображаючи пристроях, цифрових осцилографів можна спостерігати не тільки осцилограми сигналів, але й чисельні значення ряду його параметрів. Оскільки в розглянутому осцилографі є можливість вимірювати параметри сигналів на його вході, а не на виході каналу вертикального відхилення як в аналогових осцилографах, то чисельні значення параметрів сигналу відображаються з високою точністю.
Сучасні цифрові осцилографи при широкому використанні мікропроцесорних систем дозволяють вирішувати практично всі функціональні завдання, що виникають при дослідженні сигналів.
5. Вимір параметрів сигналів за допомогою універсального осцилографа
5.1. Вимір амплітудних параметрів сигналів
Універсальний електронний осцилограф дозволяє вимірювати значення постійного, змінного й імпульсного сигналів. Вимір здійснюється в амплітудних значеннях напруги електричного струму. При цьому вимірюваний сигнал подається на вхід каналу вертикального відхилення лучачи ЕПТ.
Широке розповсюдження при вимірі напруг досліджуваних сигналів отримав метод каліброваної шкали. Він заснований на лінійній залежності між значенням напруги сигналу, поданого на вхід каналу, і розміром його зображення на екрані ЕПТ (у мм, розподілах шкали). У цьому випадку при вимірі напруги шляхом зміни коефіцієнта відхилення ![]() досягають одержання розміру зображення сигналу
досягають одержання розміру зображення сигналу ![]() у межах шкали ЕПТ і вимірюють його. При відкаліброваному підсилювачі вертикального відхилення виміряну напругу обчислюють по формулі
у межах шкали ЕПТ і вимірюють його. При відкаліброваному підсилювачі вертикального відхилення виміряну напругу обчислюють по формулі
![]() (6)
(6)
Наприклад тоді  ,
, , тоді
, тоді При
При
даному вимірі генератор розгорнення може бути відключений. Він включається при необхідності оцінити форму досліджуваної напруги.
Погрішність виміру амплітудних параметрів сигналів (напруг) розглянутим методом становить 5...10 %. Вона визначається рядом факторів. Основними з них є частотні й нелінійні перекручування КВВ, погрішність коефіцієнта відхилення, погрішність візуального відліку та ін. Однакові значення зазначених факторів, що спотворюють, неоднаково проявляються при дослідженні різних форм сигналів, тому дати єдину кількісну оцінку їхнього впливу важко. Однак деякі складові погрішності виміру напруг можна виключити або врахувати при обробці результатів вимірів.
Систематична погрішність, викликана нерівномірністю АЧХ КВВ осцилографа, може бути врахована на основі відомого аналітичного виразу, що описує частотну характеристику більшості сучасних осцилографів:
![]() . (7)
. (7)
Виключити зазначену систематичну погрішність можна через
поправочний множник ![]() , який визначається за формулою (8.7) врахуванням частоти вимірюваного сигналу
, який визначається за формулою (8.7) врахуванням частоти вимірюваного сигналу![]() і верхньої граничної частоти КВВ
і верхньої граничної частоти КВВ![]() .
.
Систематична погрішність, викликана підключенням осцилографа у вимірюваний ланцюг, по фізичній природі аналогічна погрішності при підключенні вольтметрів (див. розд. 7.3).
Випадкова відносна візуальна погрішність виміру імпульсної напруги, що виникає при знятті показань із осцилографа, може бути визначена по формулі
![]() , (8)
, (8)
де![]() — ширина променя, мм;
— ширина променя, мм; ![]() — розмір зображення по вертикалі, мм.
— розмір зображення по вертикалі, мм.
Повну наближену відносну погрішність виміру амплітуди прямокутних імпульсів ![]() прийнято визначати по формулі
прийнято визначати по формулі
![]() , (9)
, (9)
де![]() — погрішність коефіцієнта відхилення,
— погрішність коефіцієнта відхилення, ![]() — погрішність через нерівномірність перехідної характеристики КВВ, %.
— погрішність через нерівномірність перехідної характеристики КВВ, %.
Значення ![]() и
и ![]() , як правило, приводять у технічній документації конкретних осцилографів. Крім того, звичайно приводять дані про статистичну погрішність виміру напруги осцилографом
, як правило, приводять у технічній документації конкретних осцилографів. Крім того, звичайно приводять дані про статистичну погрішність виміру напруги осцилографом ![]() для певних розмірів осцилограм. Слід зазначити, що погрішність
для певних розмірів осцилограм. Слід зазначити, що погрішність ![]() значно зменшується зі збільшенням розмірів осцилограми на ЕПТ, що варто враховувати при проведенні вимірів.
значно зменшується зі збільшенням розмірів осцилограми на ЕПТ, що варто враховувати при проведенні вимірів.
Більш висока точність виміру забезпечується при використанні методу заміщення (погрішність 1...3 %). У цьому випадку вимір здійснюються у два етапи. На першому етапі на ЕПТ одержують зображення досліджуваного сигналу й вимірюють його лінійний розмір ![]() . На другому етапі вимірюваний сигнал заміняють відомим (каліброваним) напругою
. На другому етапі вимірюваний сигнал заміняють відомим (каліброваним) напругою![]() і, змінюючи його, досягають розміру зображення каліброваного сигналу
і, змінюючи його, досягають розміру зображення каліброваного сигналу ![]() , рівного або кратного розміру зображення
, рівного або кратного розміру зображення ![]() ; тоді шукане значення напруги сигналу знаходять по формулі
; тоді шукане значення напруги сигналу знаходять по формулі

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
