

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Поскольку в данном случае используется только половина зон смены знака (по сравнению с FМ-кодированием), частоту синхронизирующего сигнала можно удвоить, сохранив при этом то же расстояние между зонами смены знака, которое использовалось при методе FM. Это означает, что плотность записываемых данных остается такой же, как и при MFM-кодировании, но данных кодируется вдвое больше.
Труднее всего разобраться в диаграмме, иллюстрирующей метод RLL 2,7, поскольку в нем кодируются не отдельные биты, а их группы. Первая группа слева, совпадающая с одной из приведенных комбинаций (см. выше), состоит из трех битов: 010. Она преобразуется в такую последовательность зон смены знака: TNNTNN. Следующим двум битам (11) соответствует комбинация TNNN, а последним трем (000) — NNNTNN. Как видите, в данном примере для корректного завершения записи дополнительные биты не потребовались. В этом примере минимальное и максимальное число пустых ячеек перехода между двумя зонами смены знака равно 2 и 6 соответственно, хотя в другом примере максимальное количество пустых ячеек перехода может равняться 7. Именно поэтому такой способ кодирования называется RLL 2,7. Поскольку в данном случае записывается еще меньше зон смены знака, чем при MFM-кодировании, частоту сигнала синхронизации можно увеличить в 3 раза, по сравнению с методом FM и в 1,5 раза - по сравнению с методом MFM. Это позволяет на таком же пространстве диска записать больше данных. Но необходимо отметить, что минимальное и максимальное физическое расстояние на поверхности диска между любыми двумя зонами смены знака одинаково для всех трех методов кодирования.
Словарь RLL 2, 7
Битовая последовательность | Кодированная последовательность |
11 | TNNN |
10 | NTNN |
011 | NNTNNN |
010 | TNNTNN |
000 | NNNTNN |
0010 | NNTNNT |
0011 | NNNNTNNN |
В накопителях на жестких дисках данные записываются и считываются универсальными головками чтения/записи с поверхностей вращающихся магнитных дисков, разбитых на дорожки и секторы. В накопителях обычно устанавливается несколько дисков, и данные записываются на обеих сторонах каждого из них. Однотипные (одинаково расположенные) дорожки на всех сторонах дисков объединяются в цилиндры. Для каждой стороны каждого диска предусмотрена своя дорожка чтения/записи, но при этом все головки смонтированы на общем стержне, или стойке. Поэтому головки не могут перемещаться независимо друг от друга и двигаются только синхронно. Жесткие диски вращаются намного быстрее, чем гибкие. Скорость работы того или иного жесткого диска зависит от частоты его вращения, скорости перемещения системы головок и количества секторов на дорожке. Кроме того, благодаря сочетанию всех этих факторов, обмен данными с жесткими дисками осуществляется гораздо быстрее, чем с накопителями на гибких дисках.
Модифицированная запись с групповым кодированием (Advanced Run Limited Length – ARLL) – улучшенный метод RLL, в котором, наряду с логическим уплотнением данных, производится повышение частоты обмена между контроллером и накопителем.
В настоящее время в накопителях на жестких дисках используются различные методы кодирования информации, разрабатываемые и патентуемые фирмами-производителями на основе метода с групповым кодированием - ARLL. Выпускаются также устройства с аппаратной компрессией данных на уровне интерфейса или контроллера в которых используется простое арифметическое сжатие информации перед записью и после считывания.
- Позиционирование головок
Компенсирование ошибок позиционирования, а также удержание магнитных головок над выбранной дорожкой в современных жестких дисках осуществляется с помощью сервосистемы. Сервосистема в том виде, в котором она представлена сейчас, появилась не сразу. В ранних моделях накопителей ее не было и позиционирование головок осуществлялось с помощью простого способа - при помощи шагового двигателя. Само название шаговый двигатель означает перемещение исполнительного механизма пошагово, т. е. дискретно с заданным интервалом.
Шаговый двигатель с помощью направляющей рейки преобразовывал управляющий сигнал в линейное перемещение позиционера с фиксацией головок в заданном положении, обратная связь в данной системе отсутствовала. В жестких дисках шаг перемещения ротора позиционера соответствовал шагу дорожек, т. е. двигатель за один шаг перемещал блок головок записи/чтения на одну дорожку
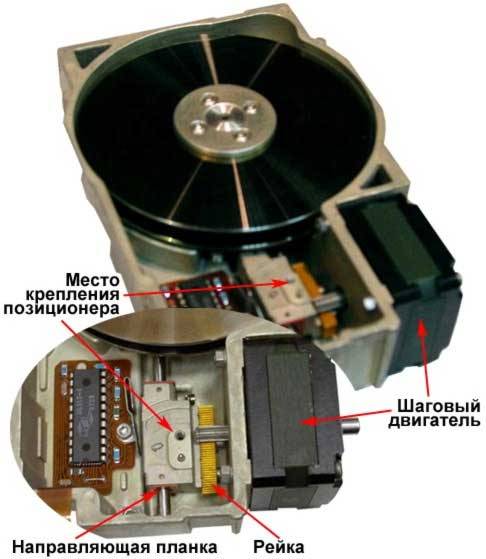
Шаговый двигатель
Основной недостаток такого подхода заключался в том, что позиции ротора шагового двигателя были фиксированными. Блок головок перемещался на то место, где должна быть дорожка, а не где она есть на самом деле. При нагреве диски расширялись и дорожки смещались относительно своего точного положения на диске на некоторую величину, соответствующую коэффициенту теплового расширения. Фиксированный шаг перемещения позиционера не позволял компенсировать это явление, а отсутствие обратной связи не позволяло контроллеру точно подстраивать блок головок записи/чтения точно по центру дорожки. Минусом данной системы было также большое время доступа к требуемой дорожке, ведь при считывании данных с внутренних и внешних дорожек пластины блок головок должен с помощью прикрепленной к нему рейки "отщелкать" максимум шагов шестерни шагового двигателя.
Увеличивающаяся плотность записи требовала увеличения количества дорожек на один сантиметр радиуса рабочей поверхности пластины ЖД, и как следствие - уменьшения расстояния между двумя соседними дорожками, и сокращению ширины самой дорожки. Поэтому эту систему позиционирования блока головок на основе шагового двигателя заменила более прогрессивная система позиционирования с соленоидным двигателем (называемая также звуковой катушкой). Сначала она была основана на линейном перемещении блока головок, но уменьшение размеров НЖМД потребовало перейти к принципу сбалансированного ротационного позиционирования. В таком приводе блок головок записи/чтения связан с катушкой индуктивности, помещенной в магнитное поле постоянного магнита. Головки жестко закреплены на поворотной рамке позиционера вместе со звуковой катушкой, через которую протекает ток. Изменение тока в звуковой катушке приводит к ее перемещению относительно жестко закрепленного магнита, а значит и к перемещению блока головок. Управляя направлением и величиной тока через катушку, можно быстро перевести блок головок в любое положение над пластиной жесткого диска. Замкнутая система обратной связи, отслеживающая положение головки, обеспечивает ее точное позиционирование и нахождение в нужной точке. Управление сервоприводом может быть оптимизировано по времени перемещения блока головок на требуемую позицию. В этом случае, если отклонение от нужного положения большое, то подается большой ток, вызывающий большое ускорение и быстрый полет блока головок записи/чтения. По мере приближения к нужной точке ток уменьшается, а для компенсации инерции в конце полета ток может поменять направление. При этом будет происходить торможение.
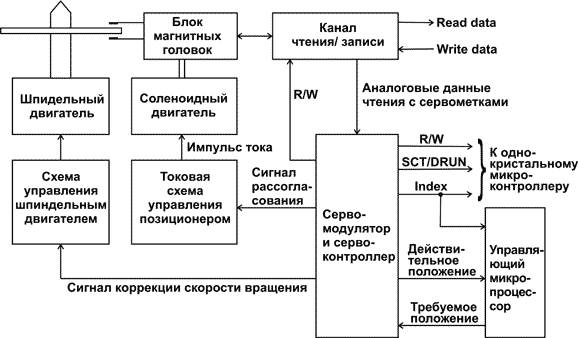
Схема позиционирования
Построение системы тонкого регулирования по такому принципу позволило значительно уменьшить влияние температурных и других негативных факторов на точность считывания информации, так как сервометки, являющиеся частью СИ, располагаются рядом с дорожками данных. Сервометки записываются в области, расположенные между дорожками, на этапе сборки накопителей с помощью высокоточного специального оборудования.
Когда головка считывания находится точно посередине между парой соседних сервометок, сигнал рассогласования равен нулю. При отклонении головки в сторону от дорожки возникает сигнал рассогласования, полярность которого зависит от того, в какую сторону она отклонилась. При этом вырабатывается воздействие на катушку, и она смещается в нужную сторону.
В современных жестких дисках используется ротационный механизм перемещения блока головок, в котором позиционер перемещается на заданный угол. В этом случае соленоидный двигатель осуществляет преобразование управляющего тока в угол поворота (t) блока головок, который является управляемой величиной.
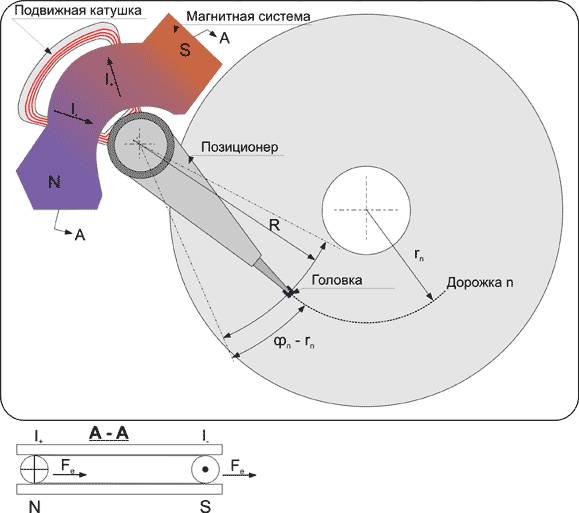
При протекании токов I+, I- (рис.15, сечение А-А) через витки рабочих участков катушки на них воздействует сила Лоренца, создающая вращающий момент, направление которого определяется по правилу "правой руки". Если через катушку пропускать постоянный ток, то под воздействием постоянного вращающего момента позиционер будет поворачиваться с постоянным ускорением (без учета сил трения) до упора. Максимальный угол поворота позиционера max составляет около 30°. Предельные положения позиционера ограничиваются механическими фиксаторами (упорами). Ось поворота катушки с рычагами выбирается таким образом, чтобы траектория головок, представляющая дугу окружности радиуса R, проходила приблизительно по радиусу диска.
1. Логическая структура дисков, хранение информации и адресование
- Разделы, логические диски, главная загрузочная область
Пространство на жестком диске может быть организовано в виде одного или нескольких разделов, а разделы могут содержать один или несколько логических дисков. На жестком диске по физическому адресу 0-0-1 располагается главная загрузочная запись (master boot record, MBR). В состав MBR входят:
1. внесистемный загрузчик (non-system bootstrap - NSB);
2. таблица описания разделов диска (таблица разделов, partition table, PT). Эта таблица расположена в MBR по смещению 0x1BE и занимает 64 байта;
3. сигнатура MBR. Последние два байта MBR должны содержать число 0xAA55.
Таблица разделов описывает размещение и характеристики имеющихся на винчестере разделов. Разделы являются контейнерами всего своего содержимого. Этим содержимым является, как правило, файловая система. Под файловой системой с точки зрения диска понимается система разметки блоков для хранения файлов. После того, как на разделе создана файловая система и в ней размещены файлы операционной системы, раздел может стать загружаемым. Загружаемый раздел имеет в своем первом блоке небольшую программу, которая производит загрузку операционной системы. Однако для загрузки определенной системы нужно явно запустить ее загрузочную программу из первого блока.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
