
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Передача колесом тяговой или тормозной силы сопровождается некоторым скольжением элементов шины, находящихся в контакте с дорогой. Чем больше передаваемая сила, тем больше это скольжение. Величину скольжения в контакте оценивают обычно относительным скольжением S, равным отношению скорости скольжения (vа - ωк·rк) к линейной (поступательной) скорости движения оси колеса vа автомобиля:
 ,
,
где ωк и rк – угловая скорость вращения и радиус колеса.
Коэффициент сцепления колеса с дорогой зависит от коэффициента скольжения S. При S = 15—30 % коэффициент сцепления имеет максимальную величину. Таким образом, если в процессе торможения автомобиля автоматически поддерживать режим, при котором S = 15—30 %, то можно обеспечить одновременно и максимальную эффективность и достаточную безопасность торможения. Все современные АБС относятся к самонастраивающимся системам автоматического поиска.
Назначение антиблокировочных систем (АБС) и состоит в том, чтобы с помощью автоматического регулирования давления в тормозном приводе поддерживать на оптимальном уровне степень скольжения. Для этого в конструкции тормозного привода должны быть применены дополнительные устройства. В частности, необходимо устройство, регулирующее тормозной момент путем регулирования давления рабочего тела в зависимости от режима работы колеса.
Такие устройства называются модуляторами. Модулятором необходимо управлять, давая команды на увеличение или уменьшение давления рабочего тела в тормозном механизме. Чтобы выработать данные команды, надо собрать и обработать информацию о параметрах движения автомобиля и вращения его колес. Эти задачи решает блок управления. Сбор указанной информации осуществляют датчики.
При постоянном значении вертикальной реакции колеса Rz величина коэффициента сцепления однозначно определяет величину максимальной продольной касательной реакции колеса Rx. Зная величину продольной касательной реакции колеса и его радиус, можно вычислить величину крутящего момента, который обеспечит максимально возможный тормозной эффект, и построить зависимость Мφ = f(S).
На рис. 52 приведена такая зависимость для одного из вариантов условий движения. На этом же графике приведена характеристика тормозного момента Мτ, реально подводимого со стороны тормозного механизма. Допустим, что к колесу подводится излишне большой тормозной момент, превышающий сцепные возможности колеса. С его ростом будет возрастать и скольжение колеса в контакте с дорогой.
Пока рост скольжения сопровождается возрастанием сцепных возможностей колеса (левая часть графика Мφ до точки его перегиба), движение колеса с уменьшающейся скоростью вращения будет устойчивым. Как только скольжение превысит определенную для заданных условий величину (характеризуемую на графике величиной S = 0,2), доля тормозного момента, идущая на создание касательных сил, начнет уменьшаться, а доля, затрачиваемая на угловое замедление колеса, соответственно возрастать.
Это приведет к быстрому росту замедления угловой скорости вращения колеса (процесс его вращения становится неустойчивым, поскольку замедление будет возрастать при неизменном или даже слегка уменьшающемся тормозном моменте). Если автомобиль не снабжен АБС, то колесо может быть доведено до состояния блокировки (юза).
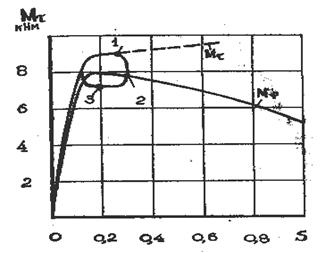
Рис. 52. К алгоритму работы АБС
При наличии антиблокировочной системы блок управления постоянно сравнивает текущее значение замедления колеса с заранее заданной ему величиной и при их равенстве в момент времени выдает модулятору сигнал на растормаживание колеса. После некоторой задержки, обусловленной инерционностью систем, давление рабочего тела начнет снижаться, что приведет сначала к снижению темпа увеличения углового замедления колеса, а затем и к его снижению. На рис. 52 это соответствует участку 1-2. После того как величина замедления колеса сравняется с заданной величиной нижнего предела замедления, блок управления выдает команду на прекращение дальнейшего снижения давления рабочего тела в контуре тормозного механизма. Вследствие снижения давления рабочего тела колесо начнет разгоняться (это соответствует точке 3), после чего последует команда на увеличение давления рабочего тела и все начнется сначала.
На рис.53 приведены характеристика и схема механического регулятора АБС, которая использовалась на старых автомобилях с пневматическим приводом тормозов. Кривая 0-1-2 на характеристике характеризует изменение тормозного механизма с пневматическим приводом. Разница между кривой Тτ и кривой Тφ соответствует замедлению колеса. После прохождения максимума кривой Тφ замедление колеса увеличивается (точка С), что характеризует стремление колеса к блокировке. Это резкое увеличение замедления ак используется в АБС в качестве первого входного сигнала для уменьшения давления в тормозном приводе. Падение давления начинается с некоторым запаздыванием, обусловленным свойствами АБС (точка 2). Затем замедление колеса уменьшается и в точке 5 становится равным нулю.
В момент времени, соответствующий точке 4, регулятор устанавливает постоянный минимальный тормозной момент. От точки 3 до точки 6 происходит разгон колеса. Увеличение углового ускорения используется в качестве второго входного сигнала для повышения давления в тормозной системе (точка 5). При этом скорость колеса приближается к скорости автомобиля, что означает уменьшение проскальзывания и, следовательно, нарастание коэффициента сцепления φ.
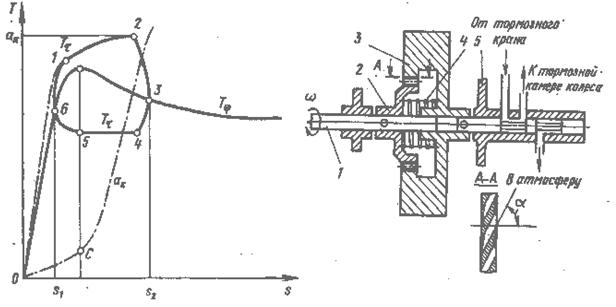
Рис. 53. Характеристика и схема регулятора антиблокировочной системы.
В дальнейшем этот цикл вновь повторяется. Таким образом, в процессе регулирования колесо то замедляет свое вращение, то разгоняется и заставляет тормозной момент Тτ изменяться по замкнутому контуру 1—2—5—4—5—6—1. Причем колесо работает в диапазоне коэффициента скольжения S 2 — S1 . В результате колесо реализует близкие к максимальному значения коэффициента сцепления. При применении АБС коэффициент скольжения изменяется в диапазоне S 2 - S1 = 20 %. Частота изменения давления в подобных пневматических приводах составляет 3—8 Гц, а в гидравлических — до 20 Гц.
Схема механического регулятора пневматического привода, который реагирует на изменение ускорения колеса и управляет исполнительным устройством, показана на рис. 53. На валу 1 датчика регулятора, приводимого во вращение от колеса автомобиля, жестко укреплена ступица 2 и свободно посажен маховик 3. Ступица и маховик соединены винтовой нарезкой (сечение А—А).
К маховику жестко прикреплен золотник 5 клапана, меняющего давление в тормозной камере. При рабочем торможении и небольшом угловом замедлении под действием пружины 4 ступица и маховик продолжают вращаться как одно целое, и регулятор не оказывает воздействия на давление в системе. При экстренном торможении угловое замедление колеса возрастает, и маховик за счет своей инерционности, преодолевая силу пружины 4, перемещается по винтовой нарезке влево. При этом происходит сначала отсоединение магистрали от тормозной камеры колеса, а затем соединение камеры с атмосферой. При достижении маховиком крайнего левого положения зубья винтового механизма выходят из зацепления. Маховик, отделившись от ступицы, продолжает свободное вращение на валу. Как только угловая частота ступицы и маховика сравняются, под действием пружины их зубья войдут вновь в зацепление, и золотник переместится в крайнее правое положение. При этом тормозная камера колеса отсоединится от атмосферы и соединится с магистралью. Торцовые поверхности зубьев на ступице и маховике имеют скосы, которые облегчают обратное их зацепление.
В условиях торможения АБС обеспечивает более высокую точность и лучшие тормозные качества автомобиля. Недостатками, ограничивающими применение рассмотренной АБС, являются недостаточная эффективность и долговечность по сравнению с другими элементами тормозной системы.
Высокоэффективные современные АБС, оснащенные электронными блоками автоматического управления, имеют датчики, установленные в колесах и непрерывно измеряющие их угловые скорости. Применяются датчики разных типов, но наибольшее распространение получили индуктивные и индукционные. Датчики состоят из диска с зубцами или отверстиями, присоединенного к колесу, и индукционной катушки. При прохождении зубцов мимо катушки, питающейся в первом случае переменным током, изменяется индуктивность системы, что отражается на токе, текущем через катушку. Во втором случае зубцы проходят в магнитном поле, созданном постоянным магнитом, и возбуждают в катушке ЭДС. Частота получаемых импульсов пропорциональна угловой скорости колеса.
Функции, выполняемые электронным блоком управления АБС, сложны и разнообразны. В частности, для определения замедления колеса осуществляется непрерывное дифференцирование его угловой скорости. Однако использование углового замедления колеса в качестве единственного параметра для управления АБС не оптимально. Резкое изменение угловой скорости колеса, может быть не связано с процессом торможения, а вызываться воздействием дорожных неровностей. С другой стороны, в силу определенной специфики достаточно точное дифференцирование угловой скорости, особенно аналоговыми устройствами, затруднено. Поэтому наиболее перспективными считаются АБС, использующие для управления, наряду с угловым замедлением колеса еще и линейную скорость автомобиля, хотя простые и достаточно дешевые датчики, измеряющие скорость автомобиля независимо от угловой скорости его колес, еще не разработаны.
Помимо отмеченных параметров, для оптимального регулирования процесса торможения блок управления должен учитывать еще и такие факторы, как трение в исполнительных механизмах тормозов и реальную, зависящую от температуры, тангенциальную упругость шины. Кроме этого, необходимо учитывать тангенциальную упругость направляющего устройства подвески (упругую деформацию подвески в направлении действия реактивного тормозного момента, что в первую очередь относится к рессоре, воспринимающей реактивный момент за счет S-образного изгиба).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
