
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таким образом, блок управления является весьма сложным узлом. Лучшие блоки управления по сложности приближаются к цифровой ЭВМ и способны обеспечить весьма малые размеры отмеченной на рис. 51 петли 1—2—3, что позволяет не только сохранять устойчивость автомобиля при торможении на скользкой дороге, но и уменьшать в этих условиях тормозной путь.
Модуляторы АБС тормозных систем с гидравлическим приводом могут иметь различное устройство. В приводах, имеющих гидравлический тормозной привод, применяют модулятор, изменяющий объем тормозного привода (рис.54). В течение первой фазы работы АБС электрический ток в обмотке 1 отсутствует, якорь 3 и плунжер 4 пружиной 2 сдвинуты вправо, а клапан 6 открыт пружиной 5. ГТЦ через ввод II и вывод I соединяется с рабочими цилиндрами тормозных механизмов.
В начале второй фазы работы АБС в обмотку 1 подается ток, якорь 3 и плунжер 4 смещаются влево, клапан 6 закрывается. После этого дальнейшее смещение плунжера влево приводит к увеличению объема полости 7 и, следовательно, к снижению давления жидкости в исполнительных цилиндрах.
5 6
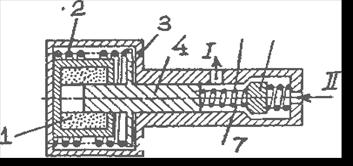
Рис. 54. Модулятор АБС для гидравлического тормозного привода:
1 – обмотка; 2 – пружина; 3 – якорь; 4 – плунжер; 5 – пружина; 6 – клапан; 7 – рабочая полость модулятора; ввод II и вывод I соединяют главный тормозной цилиндр с рабочими цилиндрами тормозных механизмов.
Модулятор, применяемый в пневматических приводах, показан на рис. 55. При отсутствии тока в обмотках сжатый воздух поступает в ускорительный клапан, который необходим ввиду замедленного срабатывания пневматики. Вторая фаза срабатывания модулятора осуществляется подачей тока в обе обмотки, а третья фаза — подачей тока только в обмотку левого соленоида.
Торможение автомобиля с АБС сопровождается многократным срабатыванием ускорительных клапанов, которое вызывает быстрое изнашивание поршневых систем. Поэтому в настоящее время разрабатываются и уже находят применение диафрагменные устройства ускорительных клапанов.
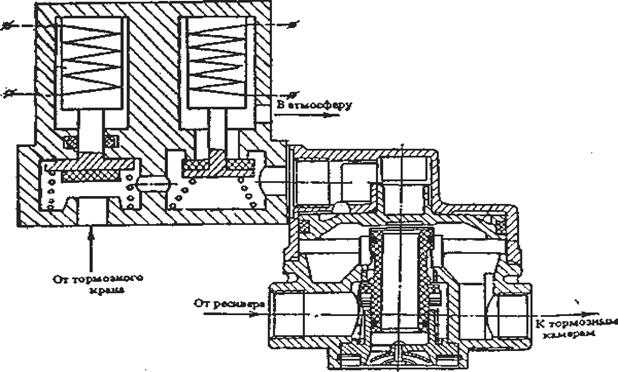
Рис. 55. Модулятор АБС для пневматического тормозного привода.
Варианты схем АБС. Обязательность наличия трех структурных элементов: датчика, управляющего блока и модулятора не исключает разнообразия вариантов схем АБС (рис.56).
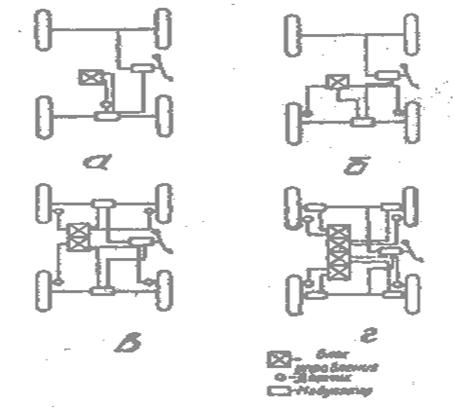
Рис. 56. Конструктивные варианты АБС.
В простейшей из представленных (рис. 56-а) схем применен один датчик, измеряющий среднее замедление колес заднего моста (замедление корпуса дифференциала), и один модулятор. Такое решение обеспечивает низкую стоимость ПБУ и в значительной степени повышает устойчивость автомобиля при торможении за счет уменьшения вероятности срыва задних колес в занос. Однако оно не позволяет в достаточной степени учесть различие коэффициентов сцепления правого и левого колес с дорогой и не препятствует блокировке передних колес автомобиля.
Схема, представленная на рис. 56-б, содержит два датчика, но один управляющий блок и один модулятор. Такая система может работать либо в низкопороговом режиме, когда управление торможением осуществляется исходя из параметров качения колеса, находящегося в худших условиях сцепления, либо в высокопороговом режиме, когда работу системы определяет колесо, имеющее лучший коэффициент сцепления. В первом случае будет наблюдаться недотормаживание колес, а во втором - блокировка «слабого» колеса. При большом различии коэффициентов сцепления во втором случае появится большое различие продольных касательных реакций между правым и левым бортами автомобиля.
Преимущества и недостатки схемы, показанной на рис. 56-в, по сравнению со схемой, изображенной на рис. 56-б, очевидны. Наиболее сложна и дорога АБС, построенная по схеме, приведенной на рис. 56-г, но она обладает и наилучшими качествами. Однако и в этом случае при сильно отличающихся коэффициентах сцепления под правыми и левыми колесами возможен занос автомобиля. Для устранения этого необходимо согласовать работу всех блоков управления.
Схемы АВС современных автомобилей приведены на рис.57.
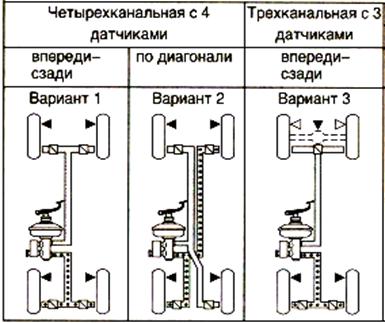
Рис. 57. Варианты систем АБС:
![]() - канал управления;
- канал управления; ![]() - датчик;
- датчик; ![]() - датчик, альтернативный по отношению к датчику дифференциала.
- датчик, альтернативный по отношению к датчику дифференциала.
Четырехканальная система допускает отдельный контроль давления в двухконтурных системах с соединением по мостам (II) и с диагональным соединением (Х). Когда осуществляется торможение на дорожном покрытии с разными коэффициентами сцепления справа и слева («микст»), то должны предприниматься меры для обеспечения отсутствия момента относительно вертикальной оси, который может оказать отрицательное воздействие на курсовую устойчивость автомобиля.
Решением в данном случае может стать отдельное управление колес переднего моста, а также управление колес заднего моста в соответствии с принципом «низкопорогового» регулирования (заднее колесо с наименьшим значением коэффициента сцепления определяет давление, которое подается к обоим задним тормозным механизмам).
В трехканальной системе момент разворота во время торможения на дорожных покрытиях типа «микст» уменьшен так, что легковые автомобили с длинной базой и большим моментом инерции относительно вертикальной оси достаточно надежно могут управляться во время торможения.
Двухканальные системы, с одной стороны, имеют меньшее число компонентов, чем трехканальные, что делает их менее дорогостоящими. С другой стороны, возникает некоторое количество функциональных ограничений. Поэтому в современном автомобилестроении они не применяются.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
