
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]()
Мы предрассчитали точность измерений, вес которых принимается равным 1, т. е. измерения со СКО ![]() . Но у нас имеются и другие измерения, например, линии. Их точность определяется исходя из соотношения весов. Например, пусть задана величина
. Но у нас имеются и другие измерения, например, линии. Их точность определяется исходя из соотношения весов. Например, пусть задана величина ![]() , для которой р=1,
, для которой р=1,  . Необходимо найти
. Необходимо найти ![]() . Тогда запишем известное соотношение весов
. Тогда запишем известное соотношение весов
![]()
![]()
 ,
,
Что соответствует задаваемой по проекту средней квадратической ошибке линейных измерений.
Дадим особое решение этой задачи для второго критерия. Второй критерий заключается в заданной СКО взаимного положения пунктов.
Взаимное положение пунктов можно представить следующими векторами:
∆х = х2 – х1,
∆у = у2 – у2;
или
∆=Ах,
где
 |

 А = , х = , ∆ =
А = , х = , ∆ =
∆ - вектор взаимного положения пунктов.
Найдем корреляционную матрицу этого вектора
К∆ = σ2· АКАт,
где σ –стандарт измерения, вес которого принимается равным единице.
Для этого вначале найдем произведение АК:
АК= ·К =
 |
=
и окончательно
 |
σ2· AКАт = σ2· AК · ,
или
К∆ = σ2·
Выведенная матрица характеризует точность взаимного положения пунктов. Для упрощения расчетов на стадии проектирования можно принять недиагональные элементы настоящей матрицы равными нулю (Qх1х2 = Qх2х1 = 0, Qу2у1 = Qу1у2 = 0).
Тогда в упрощенном виде корреляционная матрица взаимного положения пунктов примет вид:
К∆ = АКАт = σ2 * ,
где Qх1х1 – это обратный вес положения точки 1 по оси х; Qх2х2 – это обратный вес положения точки 2 по оси х; Qу1у1 – это обратный вес положения точки 1 по оси у; Qу2у2 – обратный вес положение точки 2 по оси у.
Настоящая матрица неудобна для практического применения, где точность взаимного положения выражают одним числом. При этом часто находят сумму диагональных элементов этой матрицы и ею характеризуют точность взаимного положения пунктов, то есть записывают следующее выражение
σ∆ = σ2(Qх1х1+Qч2ч2+Qy1y1+Qy2y2),
где σ∆ - стандарт взаимного положения
Введя обозначения
,
где σ1 σ2 – стандарты положения пунктов.
записывают
σ∆ = σ21 + σ22.
Если же принять
σ1 = σ2 = σt,
тогда
σ2∆ = 2σ2t
Из этого следует, что квадрат стандарта взаимного положения пунктов равен двум квадратам стандарта положения одного пункта Здесь и в дальнейшем будем считать, что средняя квадратическая ошибка и стандарт – одно и то же понятие.
Очевидно, что
σ∆ = σt*√2.
Если в нормативном документе задано максимальное значение для σ∆,
то по нему находится
σt=σ∆/√2,
которое приравнивается к ![]() и все расчеты выполняются так, как описано для
и все расчеты выполняются так, как описано для
критерия СКО взаимного положения пунктов в наиболее слабом месте сети
3. Система координат принимается в зависимости от вида инженерных сооружений. Выбирают такую систему, чтобы можно было не вводить поправки за переход в картографическую проекцию. Если взять проекцию Гаусса-Крюгера, то рекомендуется выбирать ширину зоны порядка 20 км влево и вправо от осевого меридиана условной местной системы координат. Иногда подбирают такую систему координат, чтобы суммарная поправка за переход на эллипсоид и в картографическую проекцию была равна 0.
При переходе с земной поверхности S на эллипсоид длина S укорачивается не величину ΔS.
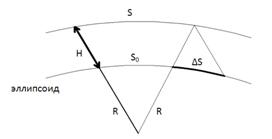
При переходе в картографическую проекцию (ГК) длина линии увеличивается
![]()
![]()
![]()
![]()
H=200 м, R=6371000 м.
![]()
4. Из функции  непосредственно вычисляем СКО измерений направлений в триангуляции.
непосредственно вычисляем СКО измерений направлений в триангуляции.
5. Оценку проекта покажем на примере. Пусть создан проект следующей полигонометрической сети. A, B, C, D - исходные. I, II - определяемые.
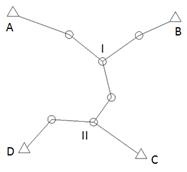
Необходимо рассчитать точности определения положения проектных пунктов I, II, сравнить эту точность с заданной по инструкции или по проекту. Если эта точность недостаточна, то увеличивается, то увеличивается точность угловых и линейных измерений до получения необходимой точности определения пунктов.
Порядок работы следующий: по каждому звену A-I, B-I, D-II, C-II, I-II рассчитать СКО
 - число сторон в звене
- число сторон в звене
![]() -расстояние от центра тяжести звена к пунктам
-расстояние от центра тяжести звена к пунктам
![]() - СКО измерения углов
- СКО измерения углов
![]() - СКО i-ой стороны
- СКО i-ой стороны
Если принять 
Порядок расчета:
Первое приближение. Вычисление СКО положения точки I по звеньям
mz1 → A-I
mz2 → B-I
mz2 → II-I
при заданных ![]() и
и ![]() .
.
Вычисляют веса ![]() . С - произвольная величина, соразмерная со среднем значением mz, принимаемая для удобства вычислений.
. С - произвольная величина, соразмерная со среднем значением mz, принимаемая для удобства вычислений.
PI = Pz1 + Pz2 + Pz3
![]()
В этом же приближении вычисляют СКО по звеньям относительно точки II
mz4 → С-II
mz5 → D-II
mz6 → I-II
![]()
![]()
PII = Pz4 + Pz5 + Pz6
Второе приближение. Снова вычисляют
![]()
![]()
![]()
PI = Pz1 + Pz2 + Pz3
![]()
![]()
![]()
![]()
PII = Pz4 + Pz5 + Pz6
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
