
Шумоподавление при помощи прямоугольного фильтра имеет существенный недостаток: все пиксели в маске фильтра на любом расстоянии от обрабатываемого оказывают на результат одинаковый эффект. Несколько лучший результат получается при модификации фильтра с увеличением веса центральной точки:
 .
.
Более эффективное шумоподавление можно осуществить, если влияние пикселей на результат будет уменьшаться с увеличением расстояния от обрабатываемого. Этим свойством обладает гауссовский фильтр с ядром: h(i, j) = (1/2ps2) exp(-(i2+j2)/2s2). Гауссовский фильтр имеет ненулевое ядро бесконечного размера. Однако значения ядра фильтра очень быстро убывает к н), и потому на практике можно ограничиться сверткой с окном небольшого размера вокруг (0, 0), например, взяв радиус окна равным 3σ.
Гауссовская фильтрация также является сглаживающей. Однако, в отличие от прямоугольного фильтра, образом точки при гауссовой фильтрации будет симметричное размытое пятно, с убыванием яркости от середины к краям. Степень размытия изображений определяются параметром σ.
Контрастоповышающие фильтры. Если сглаживающие фильтры снижают локальную контрастность изображения, размывая его, то контрастоповышающие фильтры производят обратный эффект и, по существу, являются фильтрами высоких пространственных частот. Ядро контрастоповышающего фильтра в точке (0, 0) имеет значение, большее 1, при общей сумме значений, равной 1. Например, контрастоповышающими фильтрами являются фильтры с ядром, задаваемым матрицами:
 .
.  .
.
Рис. 17.3.1. |

Пример применения фильтра ![]() приведен на рис. 17.3.1. Эффект повышения контраста достигается за счет того, что фильтр подчеркивает разницу между интенсивностями соседних пикселей, удаляя эти интенсивности друг от друга. Этот эффект будет тем сильней, чем больше значение центрального члена ядра. Характерным артефактом линейной контрастоповышающей фильтрации являются заметные светлые и менее заметные темные ореолы вокруг границ.
приведен на рис. 17.3.1. Эффект повышения контраста достигается за счет того, что фильтр подчеркивает разницу между интенсивностями соседних пикселей, удаляя эти интенсивности друг от друга. Этот эффект будет тем сильней, чем больше значение центрального члена ядра. Характерным артефактом линейной контрастоповышающей фильтрации являются заметные светлые и менее заметные темные ореолы вокруг границ.
Разностные фильтры – это линейные фильтры, задаваемые дискретными аппроксимациями дифференциальных операторов (по методу конечных разностей). Данные фильтры играют важнейшую роль во многих приложениях, например, для задач поиска границ на изображении.
Простейшим дифференциальным оператором является взятие производной по x-координате d/dx, который определен для непрерывных функций. Распространенными вариантами аналогичных операторов для дискретных изображений являются фильтры Прюита (Prewitt) и Собеля (Sobel):
 .
.  .
.
Фильтры, приближающие оператор производной по y-координате d/dy, получаются путем транспонирования матриц.
Простейший алгоритм вычисления нормы градиента по трем смежным точкам:
G(x, y) =![]() .
.
Применяется также упрощенная формула вычислений:
G(x, y) @ ![]() .
.
Вычисление нормы градиента по четырем смежным точкам (оператор Робертса):
G(x, y) =![]() .
.
G(x, y) @ ![]() .
.
В алгоритме Собеля используется восемь отсчетов яркости в окрестностях центральной точки:
G(x, y) =![]() , G(x, y) @
, G(x, y) @ ![]() ,
,
Gxx, y = [Ax-1,y-1+2Ax-1,y+Ax-1,y+1] - [Ax+1,y-1+2Ax+1,y+Ax+1,y+1],
Gyx, y = [Ax-1,y-1+2Ax, y-1+Ax+1,y-1] - [Ax-1,y+1+2Ax, y+1+Ax+1,y+1].
Наряду с более точным определением нормы градиента алгоритм Собеля позволяет определять и направление вектора градиента в плоскости анализа изображения в виде угла j между вектором градиента и направлением строк матрицы:
j(x, y) = argtg(Gyx, y /Gxx, y).
В отличие от сглаживающих и контрастоповышающих фильтров, не меняющих среднюю интенсивность изображения, в результате применения разностных операторов получается, как правило, изображение со средним значением пикселя близким к нулю. Вертикальным перепадам (границам) исходного изображения соответствуют пиксели с большими по модулю значениями на результирующем изображении. Поэтому разностные фильтры называют также фильтрами выделения границы объектов.
Аналогично вышеприведенным фильтрам, по методу конечных разностей можно составить фильтры для других дифференциальных операторов. В частности, важный для многих приложений дифференциальный оператор Лапласа (лапласиан) D= 𝝏2/𝝏x2 + 𝝏2/𝝏y2 можно приблизить для дискретных изображений фильтром с матрицей (один из вариантов):
 .
.
Рис. 17.3.2. |
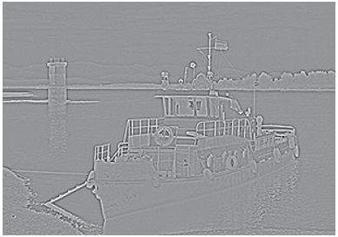
Как видно на рис. 17.3.2, в результате применения дискретного лапласиана большие по модулю значения соответствуют как вертикальным, так и горизонтальным перепадам яркости. Фильтр является, таким образом, фильтром, находящим границы любой ориентации. Нахождение границ на изображении может производиться путем применения этого фильтра и взятия всех пикселей, модуль значения которых превосходит некоторый порог.
Однако такой алгоритм имеет существенные недостатки. Главный из них - неопределенность в выборе величины порога. Для разных частей изображения приемлемый результат обычно получается при существенно разных пороговых значениях. Кроме того, разностные фильтры очень чувствительны к шумам изображения.
Двумерная циклическая свертка. Как и для одномерных сигналов, двумерная свертка может выполняться в области пространственных частот с использованием алгоритмов быстрого преобразования Фурье и перемножением двумерных спектров изображения и ядра фильтра. Она также является циклической, и выполняется обычно в скользящем варианте. С учетом цикличности, для вычисления постоянного шаблона спектра ядра размеры маски фильтра ядра удваиваются по осям и дополняются нулями, и эти же размеры маски используются для выделения скользящего по изображению окна, в пределах которого и выполняется БПФ. Реализация КИХ фильтра с помощью БПФ особенно эффективна, если фильтр имеет большую опорную область.
Нелинейные фильтры. В цифровой обработке изображений широко применяются нелинейные алгоритмы на основе ранговой статистики для восстановления изображений, поврежденных различными моделями шумов. Они позволяют избежать дополнительного искажения изображения при удалении шума, а также значительно улучшить результаты работы фильтров на изображениях с высокой степенью зашумленности.
Введем понятие M-окрестности элемента изображения A(x, y), который является для этой окрестности центральным. В простейшем случае M-окрестность содержит N-пикселей – точки, попадающие в маску фильтра, включая (или не включая) центральный. Значения этих N-элементов можно расположит в вариационном ряду V(r), ранжированном по возрастанию (или убыванию), и вычислить определенные моменты этого ряда, например, среднее значение яркости mN и дисперсии dN. Вычисление выходного значения фильтра, которым заменяется центральный отсчет, выполняется по формуле:
B(x, y) = aА(x, y) + (1-a)mN. (17.3.2)
Значение коэффициента a = [0, 1] связывается определенной зависимостью со статистикой отсчетов в окне фильтра, например:
a = dN /(dN + k dS), (17.3.3)
где dS – дисперсия шумов по изображению в целом или по S-окрестности при S > M и MÎS, k - константа доверия дисперсии S-окрестностей. Как следует из этой формулы, при k=1 и dN » dS имеет место a » 0.5, а значение B(x, y) = (А(x, y) + mN)/2, т. е. складываются в равной степени от значений центрального отсчета и среднего значения пикселей его M-окрестности. При увеличении значений dN происходит увеличение вклада в результат значения центрального отсчета, при уменьшении – значения mN. Весомость вклада средних значений по M-окрестности можно изменять значением коэффициента k.
Выбор статистической функции и характер зависимости от нее коэффициента a может быть достаточно многообразным (например, по дисперсиям разностей отсчетов в М-окрестности с центральным отсчетом), и зависит как от размеров апертуры фильтра, так и от характера изображений и шумов. По существу, значение коэффициента a должно задавать степень поврежденности центрального отсчета и, соответственно, функцию заимствования для его исправления отсчетов из М-окрестности.
Наиболее простыми и распространенными типами нелинейных фильтров для обработки изображений являются пороговые и медианные фильтры.
Пороговая фильтрация задается, например, следующим образом:
B(x, y) = 
Величина p является порогом фильтрации. Если величина центральной точки фильтра превышает среднее значение отсчетов mN в ее М-окрестности на величину порога, то она заменяется средним значением. Значение порога может быть как константой, так и функционально зависимым от величины центральной точки.
Медианная фильтрация определяется следующим образом:
B(x, y) = med {M(x, y)},
т. е. результат фильтрации есть медианное значение пикселей окрестности, форма которой определяется маской фильтра. Медианная фильтрация способна эффективно удалять из изображения помехи, независимо воздействующие на отдельные пиксели. Например, такими помехами являются "битые" пиксели при цифровой съемке, "снеговой" шум, когда часть пикселей заменяется на пиксели с максимальной интенсивностью, и т. п. Преимущество медианной фильтрации заключается в том, что "горячий" пиксель на темном фоне будет заменен темным, а не "размазан" по окрестности.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
