
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для транспарантных (прозрачных) PN измерений дальности, процесс передачи на борт - точно такой же, как в случае регенеративных измерений. Однако, при транспарантных PN измерениях дальности, на космическом аппарате не производится синхронизация и выделение кода измерений; вместо этого фазомодулированный сигнал дальности принятый на борту по радиолинии "борт-земля" без дальнейшей обработки передается в радиолинию "борт-земля". Приемник наземной станции демодулирует сигнал радиолинии "борт-земля" производит сопоставление (корреляцию) PN сигнала дальности точно таким же способом, как и при регенеративных измерениях. Так как любой передаваемый на борт шум, повторно модулирует радиолинию "борт-земля", точность транспарантных измерений в общем случае не будет такой же хорошей как при регенеративных измерениях; однако, транспарантные измерения дальности требует на космическом аппарате менее сложного транспондера.
Настоящий Рекомендуемый Стандарт разделен на две основные части, охватывающие регенеративные PN измерения и транспарантные PN измерения дальности. Данный Рекомендуемый Стандарт содержит разделы по выбору структуры PN кода и схем модуляции, обработке сигнала радиолинии "земля-борт" на наземной станции, обработке сигнала на борту космического аппарата, и обработке на наземной станции сигнала радиолинии "борт-земля".
3. Регенеративные псевдошумовые системы измерения дальности
3.1 ОБЩИЕ ПОЛОЖЕНИЯ
В данном разделе представлены рекомендации для регенеративного способа PN измерений дальности. В частности даны рекомендации для структуры PN кода и схемы модуляции, обработки сигнала передаваемого наземной станцией по радиолинии "земля-борт", регенеративной обработке на борту и обработке сигнала, принимаемого наземной станцией по радиолинии "борт-земля".
3.2 Структура PN кода
3.2.1 ОБЩИЕ ПОЛОЖЕНИЯ
В данном подразделе даны определения для компонент PN кода измерения дальности и комбинационной логики формирования регенеративного PN кода измерения дальности.
3.2.2 балансный код ТАУсВорта с ВЗВЕШЕННОЙ ОЦЕНКОЙ, ν = 4
Для измерений дальности, когда первостепенный интерес представляет точность измерений, должен быть выбран PN код измерения дальности, называемый балансным кодом Таусворта с взвешенной оценкой, ν = 4 (T4B).
Код составлен из шести бинарных (±1) периодических компонент (составляющих последовательностей) с алгоритмом объединения, основанным на предоставлении тактовой компоненте C1 весового коэффициента (голосов) ν = 4, как показано на рисунке 3-1.
Результирующая последовательность дальности C является периодической с длиной
L = 2 × 7 × 11 × 15 × 19 × 23 = 1 009 470 чипов.
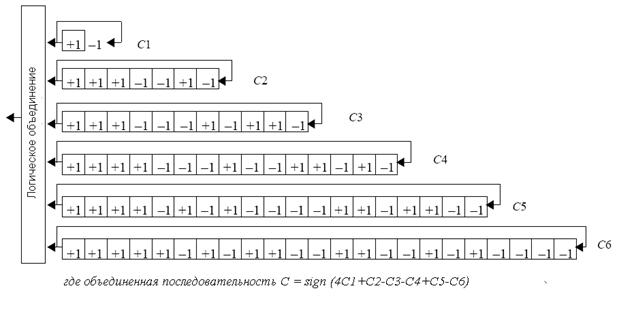
Рисунок 3-1: Формирование регенеративного PN кода T4B
3.2.3 балансный код ТАУсВорта с ВЗВЕШЕННОЙ ОЦЕНКОЙ, ν = 2
Для измерения дальности, когда приоритетным является время синхронизации, полеты, сигнал измерения дальности в которых предполагается очень слабым, должен быть применен PN код, называемый балансным кодом Таусворта с взвешенной оценкой, ν=2 (T2B).
Код дальности Таусворта с взвешенной оценкой (ν =2) составлен из тех же шести бинарных (±1) периодических компонент, что и код T4B, но с иным алгоритмом объединения, основанным на предоставлении тактовой компоненте C1 весового коэффициента (голосов) ν =2, как показано на рисунке 3-2.
Результирующая дальномерная последовательность C является периодической с длиной
L = 2 × 7 × 11 × 15 × 19 × 23 = 1 009 470 чипов.

Рисунок 3-2: Формирование регенеративного PN кода T2B
3.3 Обработка сигналА радиолинии «земля-борт» аппаратурой наземной станции
3.3.1 ОБЩИЕ ПОЛОЖЕНИЯ
В данном подразделе даны рекомендации для обработки сигнала PN кода измерения дальности радиолинии «земля-борт» (передача) аппаратурой наземной станции.
3.3.2 МОДУЛЯЦИЯ СИГНАЛА РАДИОЛИНИИ «ЗЕМЛЯ-БОРТ»
Передатчик наземной станции должен модулировать несущую радиолинии «земля-борт» PN кодом, определённым в п. 3.2.
Несущая радиолинии "земля борт" должна быть модулирована линейно по фазе сигналом дальности, то есть положительный переход от -1 к +1 кода в полосе модулирующих частот должен привести к опережению фазы радиочастотной несущей.
В зависимости от требований космического полета к PN сигналу измерения дальности может потребоваться формирование полосы сигнала модулирующих частот (видеосигнала), чтобы сохранить ширину полосы излучаемых частот на высоких чиповых скоростях. В этом случае фильтр формирования должен иметь следующую импульсную передаточную функцию:
где Tc - длительность чипа.
Сигнал дальности согласно этому стандарту и телекоманда, как определено в документе CCSDS 401.0-B пп. 2.2.4 и 2.2.7 (см. ссылку [1]) могут выдаваться одновременно.
3.3.3 Чиповая скорость в радиолинии «земля-борт»
Частота передачи чипов (чиповая скорость) сигнала дальности должна быть частотой когерентной с несущей частотой радиолинии «земля-борт», как представлено в следующем выражении (для k=6 и l = {1, 2, …, 12, 16, 32, или 64} или для l=2 и k = {8, 9, или 10}). См. также пример применяемых чиповых скоростей в приложении B.
Таблица 3-1: Чиповые скорости радиолинии «земля-борт»
|
где,
Fчип – чиповая скорость в Мчип/с
Fтакт- тактовая частота сигнала дальности в МГц
fS-диап, fX-диап, fKa-диап частоты радиолиний S, X, Ka –диапазонов в МГц
Из соображения возможности взаимодействия, наземные станции должны поддерживать, как минимум, два значения чиповых скоростей: предпочтительное значение это приблизительно два Мчипа/с, которое соответствует выбору l=8 и k=6 в формулах из Таблицы 3-1, а также более низкое значение скорости приблизительно один Мчип/с при выборе l=4 и k=6.
______________________
2 34200-34700 МГц.
Аппаратный состав наземных станций некоторых Агентств - членов CCSDS, возможно, не позволит легко реализовать вышеупомянутые соотношения между чипоой скоростью и несущей частотой. В таких случаях, расхождение между генерируемой величиной и теоретической должно быть <10 миллигерц. Однако, чиповая скорость должна оставаться привязанной к эталону частоты станции.
3.4 Обработка сигнала на борту
3.4.1 общие положения
В данном подразделе определены функции и характеристики для регенеративного измерения дальности, относящиеся к бортовой аппаратуре космического аппарата. Требования пунктов 3.4.2, 3.4.6.1 и 3.4.6.3 необходимы для взаимной поддержки, в то время как требования пунктов 3.4.3, 3.4.4, 3.4.5 и 3.4.6.2 основаны на хорошей технической практике и могут быть смягчены в зависимости от определенных требований полета.
3.4.2 Функции обработки
В бортовом транспондере должны реализовываться следующие функции:
– отслеживание несущей и демодуляция сигналов дальности;
– захват по чиповой частоте и её отслеживание;3
– вхождение в синхронизм по кодовой комбинации и слежение;
– когерентная ретрансляция регенерированного4 кода в радиолинию «борт-земля».
Поскольку обработка сигнала дальности связана с тем, какой транспондер может быть использован с когерентной5 частотой либо некогерентной. Требования, изложенные в данном Стандарте6 предполагает транспондер с когерентной частотой.
Эти требования должны применяться ко всем режимам работы таким, как вкл\выкл телекоманды и вкл\выкл телеметрия.
______________________________
3 Несущая радиолинии «земля-борт», когерентная с чиповой скоростью PN кода допускает использование бортовой вспомогательной петли синхронизации/отслеживания кода, что особенно полезно в случае низкого отношения сигнал/шум.
4 Для передачи с борта используется та же самая структура кода, что и для передачи на борт.
5 В случае реверсивной передачи с когерентной несущей, несущая и чиповая скорость PN кода, принимаемые наземной станцией, являются когерентными (как в случае передачи на борт); это может быть использовано на наземной станции для вспомогательной петли синхронизации/отслеживания кода, например, в случае низкого отношения сигнал/шум.
6 Корреляционные потери для некогерентных операций можно найти в Зеленой Книге «PN систмы измерения дальности» (см. ссылку [C1])
3.4.3 характеристики ЗАХВАТа СИГНАЛА ДАЛЬНОСТИ
3.4.3.1 Общие положения
Бортовой приемник должен обеспечивать захват PN кода в пределах всего динамического диапазона мощности входного сигнала (вплоть до минимального отношения мощности сигнала дальности к спектральной плотности шума, Pr/N0), для смещения частоты (Df/f) и доплеровской скорости (R). Значения этих параметров зависят от выбранного типа космического полета.7
Предусматриваются следующие два рабочих диапазона:
– 10 дБГц ≤ Pr/N0 ≤ 30 дБГц; Df/f ≤ 30 х 10-6; R<0,01 х 10-6/сек;
– Pr/N0 > 30 дБГц; Df/f ≤ 60 х 10-6; R<0,1 х 10-6/сек.
ПРИМЕЧАНИЕ – методика полуавтоматического захвата, (в которой используется несущая частота, чтобы приблизительно оценить величину чиповой скорости) может помочь удержать сигнал дальности в синхронизме, когда используется узкая полоса кодовой петли (ФАП). Это особенно полезно в случае низкого значения Pr/N0. В этом случае, транспондер будет в состоянии войти в захват и вести слежение при отклонении чиповой скорости до 10 мгц.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
