
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.4.3.2 Нелинейность бортового тракта
Фаза ответного сигнала не должен отклоняться больше чем на ± 5 градусов от линейной фазочастотной зависимости в диапазоне частот ±1,5*Fchip
Отклонение коэффициента усиления в канале передачи от идеально плоской характеристики должно быть постоянным в пределах ± 0,5 децибела в полосе ± 1,5*Fchip
3.4.3.3 Время и вероятность захвата
Бортовой приемник должен обеспечивать захват и синхронизацию по фазе кода сигнала измерения дальности за время (Tacq) что соответствует снижению отношения С/Ш менее чем на два децибела относительно значения приведенного в таблице 3-4 для теоретического значения времени захвата, при вероятности захвата, более чем 99,9 %.
Захват и рабочие параметры связаны с превышением мощности сигнала дальности над спектральной плотностью шума (Pr/N0), выбранным кодом сигнала дальности (семейство кодов и чиповая скорость) приведенных в пп. 3.2 и 3.3.3. Для других значений отношения Pr/N0, максимальное время захвата должно рассчитываться, путем деления значения из таблицы 3-2 на 10 (Pr/N0-30)/10.
_________________________
7 Приведенные здесь сдвиги частоты и скорости, соответствуют типовым ожидаемым значениям. В настоящее время ожидается, что в типовых дальних космических полетах значения отношения Pr/N0 – будут иметь более низкие пределы; аппаратуре PN измерений дальности возможно придется работать при более низких порогах.
Таблица 3-2: Теоретическое время захвата бортовым приемником фазы кода дальности
Последовательность | Теоретическое время захвата 8 Tacq при Pr/N0=30 дБГц |
Балансная Таусворта с взвешенной оценкой, ν=4 | 85,7 с |
Балансная Таусворта с взвешенной оценкой, ν=2 | 5,2с |
3.4.4 СТАБИЛЬНОСТЬ БОРТОВОЙ ЗАДЕРЖКИ СИГНАЛА ДАЛЬНОСТИ
Для достижения целей измерения дальности, задержка дальномерного сигнала на борту должна отвечать следующим требованиям:
– среднее значение задержки сигнала дальности должна быть постоянной в пределах 1/(30 *Fchip) или ± 20 наносекунд, в зависимости что больше. 9
– должна быть возможность проверки задержки в транспондере по телеметрии, подобно тому, как это делается для частоты и уровня сигнала передаваемого на борт, напряжение электропитания, и температуры, с точностью до 1/(500*Fchip) или ± 1 наносекунда, в зависимости что больше.
3.4.5 характеристика бортовой флюктуации сигнала дальности
Бортовой приемник должен отслеживать чиповую частоту сигнала дальности с флюктуацией, соответствующей снижению отношения С/Ш менее чем на два децибела относительно теоретической флюктуации, приведенной в таблице 3-3 для чипа =1 Гц и чиповой скорости 2,068 Мчип/с. Параметр BL - полоса слежения ФАП зависит от превышения мощности сигнала дальности над спектральной плотностью шума (Pr /No) и выбранного кода дальности (семейства кода и чиповой скорости), приведенных в пп. 3.2 и 3.3.3
Таблица 3-3: Теоретическое значение флюктуаций дальности (однопутевой) в бортовом приемнике
Последовательность | Теоретическое значение флюктуаций 10 при Pr/N0=30 дБГц |
Балансная Таусворта с взвешенной оценкой, ν=4 | 0,87 м |
Балансная Таусворта с взвешенной оценкой, ν=2 | 1,29 м |
_________________________
8 Предполагается шесть параллельных корреляторов при идеальных условиях и с мягким квантованием сигнала на выходе фильтра обнаружения чипа.
9 Это условие применяется для любых значений в пределах диапазона номинальных значений частот несущей (учитывая Доплеровский сдвиг), входной уровень, индекс модуляции, электропитание, температуру, и срок службы.
10 Предполагается формирование полосы модулирующих частот радиолинии «земля борт» или бортовая фильтрация и бортовой чиповый ФАП при идеальных условиях.
3.4.6 модуляция сигнала рдиолинии «борт-земля»
3.4.6.1 Общие положения
Восстановленный сигнал дальности должен быть подан на модулятор радиолинии «борт-земля», в котором используется линейная фазовая модуляция; то есть, положительный сдвиг фазы в линии связи Земля-Космос должен дать начало положительному сдвигу в линии связи Космос-Земля.
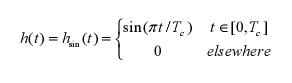
В зависимости от требований космического полета к PN сигналу измерения дальности может потребоваться формирование полосы сигнала модулирующих частот (видеосигнала), чтобы сохранить ширину полосы излучаемых частот на высоких чиповых скоростях. В этом случае фильтр формирования должен иметь следующую импульсную передаточную функцию
3.4.6.2 Нелинейность бортового тракта
Фаза ответного сигнала не должен отклоняться больше чем на ± 5 градусов от линейной фазочастотной зависимости в диапазоне частот ±1,5*Fchip
Отклонение коэффициента усиления в канале передачи от идеально плоской характеристики должно быть постоянным в пределах ± 0,5 децибела вне полосы ± 1,5*Fchip
3.4.6.3 Чиповая скорость в радиолинии «борт-земля»
Чиповая скорость радиолинии «борт-земля» должна быть когерентной по частоте с чиповой скоростью радиолинии «земля-борт». Когда транспондер находится в когерентном режиме, чиповая скорость радиолинии «борт-земля» должна быть также когерентна по частоте с несущей радиолинии «борт-земля». Фаза переданного кода должна быть также когерентна с фазой принятого кода.
3.5 Обработка сигналА радиолинии «борт-земля» аппаратурой наземной станции
3.5.1 общие положения
В данном подразделе даны рекомендации для обработки сигнала PN измерений дальности радиолинии «борт-земля» (прием) аппаратурой наземной станции.
3.5.2 обработка сигнала в приемнике радиолинии «борт-земля»
Приемник наземной станции должен осуществить следующие функции при измерении дальности:
– отслеживание несущей и демодуляцию сигнала дальности, когда модуляция сигнала радиолинии «борт-земля» соответствует тому, как это определено в п.3.4.6
– захват и отслеживание сигнала передачи чипов (чиповой скорости);11
– синхронизация отслеживание кода;
– сравнение начала отсчетов времени передаваемого и принимаемого кода для оценки задержки сигнала дальности.
ПРИМЕАНИЕ – Функции измерения дальности и прима и телеметрии, как правило, выполняются в одно и то же время.
3.5.3 РАБОТА СТАНЦИИ
Приемник станции должен обеспечить выделение PN кода во всем динамическом диапазоне изменения мощности входного сигнала (вплоть до минимального Pr/No), сдвига частоты (Df/f), и Доплеровской скорости (R). Эти величины будут зависеть от выбранного типа космического полета.
Предусматриваются следующие два рабочих диапазона: 12
– -10 dBHz ≤ Pr/No ≤ 30 dBHz; Df/f ≤ 60 * 10-6; R<0,02 * 10-6/сек;
– Pr /No > 30 dBHz; Df/f ≤ 120 * 10-6; R<0,2 * 10-6/сек.
ПРИМЕЧАНИЕ – Методика полуавтоматического захвата, (когда используется несущая частота, чтобы приблизительно оценить величину чиповой скорости) может помочь удержать сигнал дальности в синхронизме, когда используется ФАП с узкой полосой. Это особенно полезно в случае низкого значения Pr/N0.
3.5.4 Время и вероятность захвата
Приемник станции должен обеспечивать захват и синхронизацию по фазе кода сигнала измерения дальности за время (Tacq) при соответствующем снижении отношения С/Ш менее чем на два децибела относительно приведенного в таблице 3-4 для теоретического значения времени захвата, при вероятности захвата, более чем 99,9 %.
Рабочие параметры захвата определяются отношением Pr/N0 принимаемого сигнала, выбранным кодом сигнала дальности (семейство кодов и чиповая скорость) приведенных в пп. 3.2 и 3.3.3. Для других значений отношения Pr/N0, максимальное время захвата должно рассчитываться, путем деления значения из таблицы 3-4 на 10 (Pr/N0-30)/10.
_____________________________
11 Когерент несущей и сигнала кода дальности радиолинии «борт-земля» позволяет для полуавтоматического захвата /отслеживания использовать ФАП наземного кода дальности; это особенно полезно в случае низкого отношения С/Ш.
12 Приведенные здесь сдвиги частоты и скорости, соответствуют типовым ожидаемым значениям. В настоящее время ожидается, что в типовых дальних космических полетах значения отношения Pr/N0 – будут иметь более низкие пределы; аппаратуре PN измерений дальности, возможно, придется работать при более низких порогах.
Таблица 3-4: Теоретическое время захвата фазы кода дальности приемником наземной станции
Последовательность | Теоретическое время захвата 13 Tacq при Pr/N0=30 дБГц |
Балансная Таусворта с взвешенной оценкой, ν=4 | 4,3 с |
Балансная Таусворта с взвешенной оценкой, ν=2 | 0,26с |
3.5.5 СТАБИЛЬНОСТЬ групповой задержки СИГНАЛА ДАЛЬНОСТИ на станции
Групповая задержка сигнала на станции должна быть постоянной в пределах ±2 наносекунды в течение 12 часов.
3.5.6 характеристика станционной флюктуации сигнала
Приемник наземной станции должен отслеживать чиповую частоту сигнала дальности с флюктуацией14, соответствующей снижению отношения С/Ш менее чем на один децибел относительно теоретической флюктуации, приведенной в таблице 3-3 для чипового ФАП с полосой BL =1 Гц и чиповой скорости 2,068 Мчип/с. Рабочие характеристики следящего приема зависит от превышения мощности сигнала дальности над спектральной плотностью шума (Pr/No) и выбранного кода дальности (семейства кода и чиповой скорости), приведенных в пп. 3.2 и 3.3.3
Таблица 3-5: Теоретическое значение флюктуаций дальности (однопутевой) в приемнике наземной станции
Последовательность | Теоретическое значение флюктуаций 15 при Pr/N0=30 дБГц |
Балансная Таусворта с взвешенной оценкой, ν=4 | 0, 78 м |
Балансная Таусворта с взвешенной оценкой, ν=2 | 1,17 м |
3.5.7 точность приыязки меток времени на наемной станции
Приемник станции должен привязывать время измерения задержки сигнала дальности с погрешностью относительно UTC менее одной микросекунды.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
