

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Задание области расположения полюсов и нулей позволяет более полно оценить вид переходного процесса. При выборе расположения полюсов и нулей передаточной функции необходимо придерживаться общих рекомендаций [1].
1. Желательно располагать нули вблизи области расположения полюсов. Удаление нулей от полюсов ведет к увеличению амплитуд собственных колебаний в переходном процессе.
2. Для уменьшения отклонений в переходном процессе выгодно удалять полюсы друг от друга.
3. Приближение друг к другу не представляет опасности для тех полюсов, которые расположены далеко от мнимой оси.
Кроме этих рекомендаций сохраняют свою силу ограничения на область расположения полюсов, накладываемые в связи с требованием обеспечения определенного запаса устойчивости и быстродействия.
6.6. Интегральные оценки качества
Интегральные критерии качества дают общую оценку времени регулирования и степени отклонения управляемой величины от установившегося значения в переходном процессе в совокупности, без нахождения того и другого в отдельности.
Простейшей интегральной оценкой может служить величина
 , (6.27)
, (6.27)
где x(t) - отклонение управляемой величины от нового установившегося значения, которое она будет иметь после завершения переходного процесса.
В устойчивой системе x®0 при t®¥ и этот интеграл имеет конечную величину. Геометрически это площадь под кривой переходного процесса, построенного для отклонения (рис.6.7).
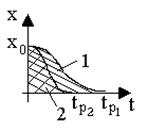
Рис. 6.7. Переходный процесс для отклонения
Площадь будет тем меньше, чем быстрее затухает переходный процесс и чем меньше величина отклонения. Поэтому параметры системы рекомендуется выбирать таким образом, чтобы добиться минимума этой интегральной оценки.
Неудобством интегральной оценки (6.27) является то, что она годится только для монотонных процессов, когда не меняется знак отклонения x. Так как форма переходного процесса при расчете системы управления неизвестна, то применять эту оценку практически нецелесообразно. Поэтому предлагается другая интегральная оценка:
 , (6.28)
, (6.28)
т. е. сумма абсолютных величин всех площадей под кривой переходного процесса. Но вычисление ее по коэффициентам уравнения затруднительно.
В связи с этим в общем случае применяют квадратичную интегральную оценку качества:
 . (6.29)
. (6.29)
В литературе [1] имеются формулы, выражающие величину J3 непосредственно через коэффициенты дифференциального уравнения замкнутой системы.
Стремление оценки J3 к нулю приближает кривую процесса к 1(t), что, в свою очередь, вызывает значительное увеличение скорости в начальный момент времени. Чтобы получить быстро затухающий и достаточно плавный процесс, вводят улучшенную квадратичную интегральную оценку качества
 , (6.30)
, (6.30)
где T назначается в соответствии с заданием желаемых свойств переходного процесса.
Наименьшее возможное значение J4 будет при x +T![]() = 0. Решение этого дифференциального уравнения x=x0e-t/T и будет той экспонентой, к которой приближается переходный процесс при стремлении уменьшить значение интегральной оценки J4.
= 0. Решение этого дифференциального уравнения x=x0e-t/T и будет той экспонентой, к которой приближается переходный процесс при стремлении уменьшить значение интегральной оценки J4.
В качестве интегральных критериев используются и функционалы более общего вида. Иногда в выражение интегральной оценки вводится время в явном виде.
Удобство интегральных оценок состоит в том, что они дают единый числовой критерий качества. Недостатком является то, что одному и тому же значению интегральной оценки могут отвечать разные формы переходного процесса, что создает недостаточную определенность решения задачи.
Интегральные критерии применяются в теории оптимальных систем управления.
6.7. Моделирование систем управления
Моделирование систем управления - это эффективный инструмент исследования сложных систем.
Модель представляет собой изображение оригинала на основе принятых гипотез и аналогий, а моделирование - представление объекта моделью для получения информации об этом объекте путем проведения экспериментов с его моделью.
Основное требование, которому должна удовлетворять модель, является ее адекватность объекту. Адекватность зависит от цели моделирования и принятых критериев. Модель адекватна объекту, если результаты моделирования подтверждаются на практике и могут служить основой для прогнозирования процессов, протекающих в исследуемых объектах.
Моделирование решает задачи изучения и исследования объектов, предсказания их функционирования, синтеза структуры, параметров и алгоритмов поведения.
Модели бывают математические и физические. Физические модели сохраняют физические свойства объекта, а математические модели представляют собой математические конструкции. В основе математического моделирования лежит подобие дифференциальных уравнений, которыми описываются процессы, происходящие в реальной системе и в модели. В настоящее время универсальным инструментом реализации математических моделей является ЭВМ. Цифровое моделирование систем управления основывается на численном решении уравнений, описывающих систему.
Рассмотрим систему с одним входом g(t) и одним выходом y(t). Передаточная функция замкнутой системы в общем случае имеет вид
 , (6.31)
, (6.31)
где n - порядок системы.
Если порядок числителя передаточной функции (6.31) окажется меньше порядка знаменателя, т. е. m<n, то b0, ... , bn-(m+1)=0.
Передаточной функции замкнутой системы соответствует дифференциальное уравнение
( a0pn+ a1pn-1+...+ an)y(t) = (b0pn+ b1pn-1+...+ bn)g(t). (6.32)
Для получения обобщенной модели системы это уравнение разрешают относительно старшей производной выходной величины:
pny(t) = ![]() [ -( a1pn-1+...+ an)y(t)+(b0pn+ b1pn-1+...+ bn)g(t)] (6.33)
[ -( a1pn-1+...+ an)y(t)+(b0pn+ b1pn-1+...+ bn)g(t)] (6.33)
или
 . (6.34)
. (6.34)
Таким образом, чтобы найти выходную величину y(t) необходимо pny(t) проинтегрировать n раз.
Уравнению (6.34) соответствует структурная схема модели, представленная на рис.6.8.
Для программной реализации полученной схемы решения исходного дифференциального уравнения (6.32) последнее переписывают в форме Коши. Для этого вводятся промежуточные переменные x1, ... , xn, соответствующие выходным величинам интеграторов. В результате получим следующую систему уравнений:
 (6.35)
(6.35)
и уравнение связи
y(t) = x1 + b0g(t). (6.36)
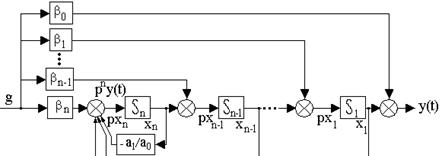
 Рис. 6.8. Структурная схема модели системы
Рис. 6.8. Структурная схема модели системы
Коэффициенты bi (где i=0, 1, 2, ... , n) определяются из условия эквивалентности системы уравнений (6.35), (6.36) исходному дифференциальному уравнению (6.32) и вычисляются последовательно следующим образом:
![]()
 . (6.37)
. (6.37)
В настоящее время разработано большое количество систем моделирования, например, Continuous System Simulation Environment (CSSE).
ВОПРОСЫ К РАЗДЕЛУ 6
1. Дайте понятие качества работы системы управления. Чем оно определяется?
2. Что представляют собой критерии качества?
3. Как производится оценка точности работы систем?
4. Чему равны первые два коэффициента ошибок в системах с астатизмом первого и второго порядков?
5. Определите показатели качества переходного процесса и частотные показатели, поясните их физический смысл.
6. Поясните связь частотных показателей качества работы системы с частотными характеристиками разомкнутой цепи.
7. Что представляют собой корневые оценки качества?
8. В чем удобство и недостатки интегральных критериев качества?
9. Каким образом экспериментальным путем можно оценить качество работы системы?
10. Какова роль моделирования систем управления?
Содержание Глоссарий
7. ТОЧНОСТЬ И ЧУВСТВИТЕЛЬНОСТЬ
СИСТЕМ УПРАВЛЕНИЯ
вопросы
7.1. Общие методы повышения точности систем управления
К числу общих методов повышения точности работы систем управления относятся:
1) увеличение общего коэффициента передачи разомкнутой системы;
2) применение управления по производным от ошибки;
3) повышение степени астатизма.
Увеличение общего коэффициента передачи k разомкнутой цепи является универсальным и эффективным методом повышения точности и быстродействия системы. При этом, что следует из раздела 6.2, уменьшаются все виды установившихся ошибок системы. Увеличение k осуществляется последовательным введением усилительного звена в прямую цепь системы. Иногда это достигается путем повышения коэффициентов передачи отдельных звеньев.
Однако увеличение общего коэффициента передачи ограничивается, как видно из раздела 5, устойчивостью системы. В этом сказывается противоречие между требованиями к точности и устойчивости системы. Поэтому увеличение общего коэффициента передачи до значения, при котором обеспечивается требование к точности системы, может производиться при одновременном повышении запаса устойчивости с помощью введения корректирующих устройств.
Введение управления по производным от ошибок. Это простейший метод улучшения качества работы системы. Структурно введение производной показано на рис.7.1. Технически это реализуется различными дифференцирующими звеньями.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
