Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
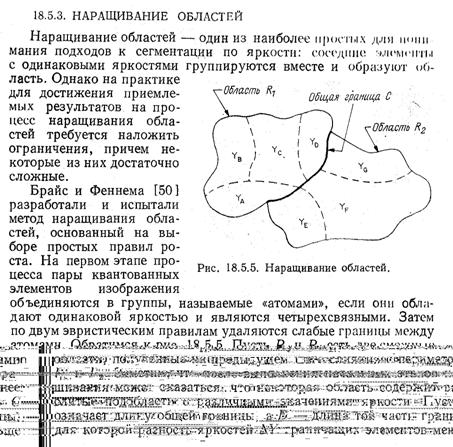
Сегментация изображений
Сегментация изображений
Сегментация устанавливает характерные подмножества пикселов или разбиение изображения на связные области, каждая из которых в некотором смысле “однородна”. Процессы сегментации и выделения признаков можно рассматривать как присваивание пикселам меток, определяющих специальные классы, к которым эти пикселы принадлежат. Таким образом, на выходе процесса сегментации находится символьное изображение, в котором значениями пиксела являются метки, а не уровни яркости.
Классификация моделей изображений
Для сегментации изображений используют ту или иную модель, обеспечивающую более или менее адекватное описание реальных изображений. Выделяют два основных класса моделей изображений: статистические и пространственные. Статистические модели описывают совокупность точечных элементов изображения или его области. Пространственные модели описывают декомпозицию изображения на составные части или области.
Статистические модели первого порядка описывают совокупность точечных элементов изображения без учета их расположения в пространстве. Простейшее описание такого типа - плотность вероятности распределения значений яркости, которая рассчитывается с помощью гистограммы значений яркости. Часто считают, что плотность вероятности распределения значений реального изображения аппроксимируется некоторой стандартной, например, гауссовой функцией плотности вероятности или смесью таких функций.
В моделях первого порядка не учитывается, что изображение состоит из каких-либо согласованных частей (элементов текстуры, объектов и т. д.). Взаимное расположение элементов в пространстве учитывают модели совокупностей точечных элементов изображения более высокого порядка. Одной из моделей является матрица смежности значений яркости, элементы которой представляют собой частоты пар значений яркости при выбранном смещении. Величина смещения на практике выбирается достаточно малой, т. к. при большом смещении значения яркости становятся независимыми друг от друга.
Другой метод описания пространственных отношений между точечными элементами изображения состоит в рассмотрении плотности вероятности распределения значений локального признака, что зачастую более эффективно, чем использование плотности вероятности распределения значений яркости высших порядков. При сегментации изображения особенно полезны локальные признаки, обусловленные наличием краев, например, значения различных дифференциальных операторов измерения градиента яркости.
К статистическим моделям изображения относятся также модели случайных полей и временных рядов, использующиеся, в основном, при моделировании текстур.
Пространственные модели описывают изображение в терминах областей. Изображение может быть представлено как совокупность объектов на фоне, как расчлененное на области некоторым регулярным или случайным способом, как модель формы областей. Пространственные модели позволяют в общем случае извлечь больше информации из изображения, чем модели статистик распределения яркости. Однако пока используются только достаточно простые модели, а их математический аппарат требует дальнейшей разработки.
Сегментация изображений методами пороговой обработки
Наиболее простым и широко распространенным методом сегментации изображений является пороговая обработка. В ряде стандартных методов выделения частей изображения по порогу величины порогов определяются непосредственно по гистограммам изображения (статистическая модель изображения первого порядка). Исторически первым методом этой группы методов является метод мод. Метод вытекает из предположения, что изображение содержит известное число однородных по яркости классов точек. Кроме того, считается, что граничные участки между замкнутыми областями занимают сравнительно небольшую площадь изображения. Поэтому на гистограмме им должны соответствовать межмодовые впадины, в пределах которых устанавливаются пороги сегментации.
Однако реальные изображения плохо удовлетворяют выдвинутым предположениям. Как правило, границы между областями размыты и модальная структура гистограммы выражена недостаточно. Кроме того, даже когда гистограмма имеет различимые моды, ее впадины могут быть настолько широкими и плоскими, что оказывается трудно локализовать дно впадины.
Если реальное изображение не удовлетворяет условиям метода мод, применяются следующие четыре подхода. Во-первых, улучшение гистограммы, в том числе, на основе локальных свойств изображения с использованием градиентной информации, статистик второго порядка, анализа кривизны интегральной функции распределения. Во-вторых, аппроксимация гистограммы смесью нормальных распределений и применение статистических методов для оптимального разделения этой смеси. Недостатком этого подхода является большая вычислительная сложность, кроме того, зачастую гауссоиды плохо аппроксимируют реальные моды. В-третьих, введение эмпирической меры качества сегментированного изображения и максимизация соответствующей критериальной функции - дискриминантный подход, энтропийный подход, моментный подход и др. В-четвертых, переход к использованию иных статистик для выбора порога, в частности, выбор порога непосредственно по локальным признакам. Использование локальных признаков позволяет сегментировать сложные реальные изображения более качественно.
Гистограммный анализ обеспечивает удовлетворительное качество сегментации тех изображений, которые состоят из однородных по яркости областей. Однако, при выделении малоразмерных объектов на сложном фоне, точки объектов не дают заметных пиков на гистограмме яркости. Поэтому применяется обработка с переменным порогом: для небольших фрагментов изображения осуществляется построение гистограмм, которые проверяются на бимодальность, а найденные локальные пороги интерполируются на оставшуюся часть изображения.
Ряд алгоритмов, основанных на дискриминантом анализе, предложен в работах Осту. Пусть G={0,1,...,L}- возможные значения яркости изображения. Порог разделяет распределение значений яркости изображения на два класса C0={0,1,...,t} и C1={t+1,t+2,...,L}, tÎG. Оптимальный порог t* определяется как
 , (1)
, (1)
где ![]() - дисперсия распределения значений яркости изображения в целом, w0 - вероятность принадлежности наугад взятой точки к фону,
- дисперсия распределения значений яркости изображения в целом, w0 - вероятность принадлежности наугад взятой точки к фону, ![]() - средний уровень яркости всего изображения,
- средний уровень яркости всего изображения, ![]() - средний уровень яркости фона (класса C0).
- средний уровень яркости фона (класса C0).
Если площади объекта и фона резко отличаются друг от друга, гистограмма критериальной функции может быть мультимодальной. Поэтому необходимо определять все локальные пики, что серьезно снижает конкурентоспособность метода.
Энтропийный критерий для выбора оптимального порога. Пользуясь введенными ранее определениями, гистограмму значений яркости можно рассматривать как L-символьный источник информации с энтропией
 ,
,
где pi – вероятность яркости со значением i.
Энтропия источника складывается из энтропии объекта H0 и энтропии фона H1, а оптимальный порог должен давать максимальное значение этой суммы:
![]() , (2)
, (2)
при этом ![]() .
.
Поскольку каждое из слагаемых H0 и H1 характеризует равномерность распределения яркостей на соответствующих интервалах и резко уменьшается при попадании в данный интервал "чужого" фрагмента гистограммы максимум энтропийного критерия будет соответствовать наилучшему варианту сегментации. Недостатком этого метода является то, что критериальная функция может иметь несколько близких по значению максимумов.
В отличие от дискриминантного подхода в методе сохранения моментов вводятся все моменты изображения до (2k+1) порядка включительно:
 .
.
Оптимальным считается порог, обеспечивающий равенство соответствующих моментов сегментированного и исходного изображений. Однако если k>3, то возникают трудности, связанные с отсутствием аналитического решения задачи.
Переход от выбора порога по гистограмме яркости к использованию иных статистик, несомненно, усложняет алгоритмы сегментации, но обеспечивает более качественную сегментацию сложных изображений. Для выделения малоразмерных объектов перспективным представляется выбор порога непосредственно по локальным свойствам точек изображения.
Метод максимума среднего контраста. В основу метода положено простое эвристическое определение оптимального порога: оптимальным для сегментации изображений считается порог, выделяющий больше высококонтрастных и меньше низкоконтрастных перепадов яркости, чем любой другой порог. Количественным выражением критерия является средний контраст всех перепадов яркости, выделяемых данным порогом. Порог, соответствующий максимальному среднему контрасту, является оптимальным. Если две смежные точки Х1=(х1,y1) и X2=(x2,y2) имеют значения яркости f(Х1) и f(X2) (без потери общности f(X1)£f(X2)), то количество перепадов, выделяемых порогом t, равно:
,
где 
Полный контраст, соответствующий порогу t, равен:
,
где 
c(X1,X2) = min{|f(X1)-t|, |f(X2)-t|} - относительный контраст.
Средний контраст всех перепадов, обнаруживаемых порогом t, равен E(t)/N(t) (равен 0, если N(t)=0). Тогда оптимальный порог t* определяется как
![]() . (3)
. (3)
На основе предложенных Хараликом матриц смежности значений яркости рассмотрен следующий метод сегментации. Для изображения строятся матрицы совместного появления уровней яркостей пар смежных точек в горизонтальном P1,0 и вертикальном P1,90 направлениях, а также суммарная матрица переходов, размером (L+1)´(L+1):
Pvh= P1,0 + P1,90.
Произвольный порог t разбивает точки изображения на два класса С0 и С1, а матрицу переходов - на 4 блока:
a= ; b=
; b= ; c=
; c= ; d=
; d= ,
,
где a, b, c, d представляют собой общее количество переходов внутри С0, внутри С1, из С0 в С1 и из С1 в С0 соответственно.
Оптимальный порог соответствует минимуму величины условной вероятности перехода уровней яркости между классами:
![]() . (4)
. (4)
Очевидным недостатком метода является большой требуемый объем дополнительной памяти.
Пространственные модели. Наращивание-расчленение областей.
В методах, объединяющих области, изображение сначала разделяется на множество мелких областей (вплоть до 1 пикселя), которые затем объединяются в большие области на основе некоторого критерия однородности. В методах расчленения, наоборот исходное изображение разбивается некоторым случайным или регулярным (например, на квадраты или 6-угольники) способом, если исходная область неоднородна.
Есть методы, объединяющие эти 2 принципа: процессы расчленения и объединения областей происходят друг за другом.
Шаг 1. Расчленение квадродерева:
Если область неоднородна, она разделяется на 4 дочерних области одинакового размера согласно предикату
 ,
, 
Такое дробление происходит до тех пор, пока остаются неоднородные области.
Шаг 2. Объединение 4 областей с одной ветки:

Шаг 3. Группирование смежных областей с разных веток:
![]() , Ri и Rj – смежные области
, Ri и Rj – смежные области
Шаг 4. Исключение малых областей
На этом шаге малые области объединяются со смежной областью большего размера. Малые области могут соответствовать, во-первых, переходным областям между большими зонами, а во-вторых, это могут быть шумы. Тест на однородность следующий:
 Ri и Rj – смежные области,
Ri и Rj – смежные области,
S – размер области, Sf / S – средняя интенсивность
![]()