
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Работа накопителя. Процесс работы накопителя от запуска до остановки. При подаче питающих напряжений начинает работать микропроцессор контроллера. Вначале он, как и компьютер, выполняет самотестирование и в случае его успеха запускает схему управления двигателем вращения шпинделя. Диски начинают раскручиваться, увлекая за собой прилегающие к поверхностям слои воздуха, и при достижении некоторой скорости давление набегающего на головки потока воздуха преодолевает силу пружин, прижимающих их к дискам, и головки всплывают, поднимаясь над дисками на доли микрона. С этого момента, вплоть до остановки дисков, головки не касаются дисков и парят над поверхностями, поэтому ни диски, ни сами головки практически не изнашиваются. Тем временем, двигатель шпинделя продолжает раскручивать поверхности. Его скорость постепенно приближается к номинальной (тысячи оборотов в минуту). В это время накопитель потребляет максимум питающего напряжения и создает предельную нагрузку на блок питания компьютера по напряжению 12 Вольт. Поскольку в любой зоне дисков присутствует серворазметка, то сервоимпульсы начинают поступать с головок сразу же после начала вращения, и по их частоте контроллер судит о скорости вращения дисков. Система стабилизации вращения следит за потоком сервоимпульсов, и при достижении номинальной скорости происходит так называемый захват, при котором любое отклонение скорости вращения сразу же корректируется изменением тока в обмотках двигателя. После достижения шпинделем номинальной скорости вращения освобождается фиксатор позиционера головок чтения/записи, и система его управления проверяет способность поворачиваться и удерживаться на выбранной дорожке путем выборочного произвольного позиционирования. При этом делается серия быстрых поворотов в разные стороны, что на слух выглядит как характерное тарахтение, слышимое через несколько секунд после старта. Во время перемещения позиционера головок происходит слежение за поступающими с головок серво-импульсами, и система управления всегда знает, над сколькими дорожками прошли головки. Аналогично происходит и удержание головок над выбранной дорожкой - при отклонении от центра дорожки изменяется во времени величина и форма серво-импульсов. Система управления может ликвидировать отклонение, изменяя ток в обмотках двигателя позиционера головок. Во время тестирования привода головок заодно делается и его калибровка - подбор параметров управляющих сигналов для наиболее быстрого и точного перемещения позиционера при минимальном количестве промахов. Здесь нужно сказать, что микрокомпьютер ЖД, как и компьютер, имеет ПЗУ, в котором записана BIOS накопителя - набор программ для начального запуска и управления во время работы, и ОЗУ, в которое после раскрутки механической системы загружаются остальные части управляющих программ. Кроме всего прочего, в ОЗУ загружается так называемая карта переназначения дефектных секторов, в которой отмечены дефектные секторы, выявленные при заводской разметке дисков. Эти секторы исключаются из работы и иногда подменяются резервными, которые имеются на каждой дорожке и в специальных резервных зонах каждого диска. Таким образом, даже если диски и имеют дефекты (а при современной плотности записи и массовом производстве поверхностей носителей они имеют их всегда), для пользователя создается впечатление чистого диска, свободного от сбойных секторов. Более того - на каждом диске накопителя имеется некоторый запас резервных секторов, которыми можно подменить и появляющиеся впоследствии дефекты. Для одних накопителей это возможно сделать под управлением специальных программ, для других - автоматически в процессе работы.
При выключении питания двигатель шпинделя работает в режиме генератора, обеспечивая питание плат электроники на время, необходимое для корректного завершения работы. Прежде всего, блокируется подача тока записи в магнитные головки, чтобы они не испортили информацию на поверхностях, а остаток энергии подается в обмотки привода головок, толкая их к центру дисков (в этом движении головкам помогает и естественная скатывающая сила, возникающая при вращении дисков). Как правило, для того чтобы запарковать головки достаточно одной скатывающей силы. Дойдя до посадочной зоны, привод головок защелкивается магнитным или механическим фиксатором еще до того, как головки успеют коснуться поверхности в результате падения скорости вращения дисков. В этом и состоит суть автопарковки - любой исправный накопитель всегда запаркует головки, как бы внезапно не было выключено питание, однако, если в этот момент происходила запись информации, то для пользователя последствия могут быть весьма печальными из-за недописанных или необновленных, как областей данных, так и управляющих структур файловой системы ПК, независимо от типа и вида установленной ОС.
Структурная схема магнитного накопителя типа «винчестер». Типовая структурная схема винчестера показана на рисунке 1.28. Функции основных узлов электроники винчестера.
Рисунок 1.28 – Структурная схема жесткого магнитного диска
N-контроллер управляет ресурсами всех узлов и отвечает за механизм выбора головки. В N-контроллер входят следующие элементы – АЦП, сервоконтроллер, блок коррекции ошибок, форматтер.
АЦП декодирует информацию о местоположении головки в цифровой вид и передает ее сервоконтроллеру.
Сервоконтроллер содержит ЦАП и тем самым управляет широтно-импульсной модуляцией, тем самым отвечая за управление позиционированием головок относительно магнитных дисков.
Блок коррекции ошибок служит для коррекции возникающих ошибок.
Форматер управляет частью процесса чтения-записи контролируя сигналы Read и Write Gate.
Дисковый контроллер (контроллер интерфейса) отвечает за обмен данными с компьютером.
Микросхема чтения-записи работает под управлением контроллера диска и интерфейса, обеспечивает предкомпенсацию записываемых данных и работу канала чтения. Микросхема чтения-записи состоит из операционного усилителя, АЦП, детектора Виттерби.
Операционный усилитель принимает сигнал чтения, усиливает и передает на фильтр Баттерворта.
Предкомпенсатор осуществляет конечное преобразование данных перед записью их на магнитный диск. Преобразованные данные поступают на предусилитель записи и затем на записывающуюся головку.
АЦП осуществляет преобразование отфильтрованного сигнала при операции чтения в цифровую последовательность.
Детектор Виттерби преобразует данные с ЦАП в поток двоичной информации.
1.5 Сканеры
Назначение. Сканером называется устройство позволяющее вводить в компьютер образы изображений. Сканеры классифицируют по степени прозрачности вводимого оригинала изображения, по кинематическому механизму сканера (конструкции механизма движения), по типу вводимого изображения, по особенностям программного и аппаратного обеспечения сканера.
По данному критерию все существующие сканеры можно подразделить на черно-белые и цветные. Черно-белые в свою очередь могут подразделяться на штриховые и полутоновые (серые). Однако полутона изображения могут также эмулироваться.
Механизм движения. Определяющим фактором для данного параметра является способ перемещения считывающей головки сканера и бумаги относительно друг друга. Сканеры по этому критерию можно разбить на два типа: ручной (ширина вводимого изображения 10 см) и настольный.
Существует три разновидности настольных сканеров: планшетные, рулонные и проекционные.
Принцип работы и схемы сканеров. Черно-белые сканеры. Сканируемое изображение освещается белым светом, получаемым, как правилом от флюоресцентной лампы. Отраженный свет через редуцирующую (уменьшающую) линзу попадает на фоточувствительный полупроводниковый элемент, называемый Прибором с Зарядовой Связью - ПЗС. В основу ПЗС положена чувствительность проводимости р-n-перехода обыкновенного полупроводникового диода к степени его освещенности. На р-n-переходе создается заряд, который рассасывается со скоростью, зависящей от освещенности. Чем выше скорость рассасывания, тем больше ток через диод. Каждая строка сканирования изображения соответствует определенным значениям напряжения на ПЗС. Эти значения напряжения преобразуются в цифровую форму либо через аналого-цифровой преобразователь АЦП (для полутоновых сканеров), либо через компаратор (для двухуровневых сканеров). Компаратор сравнивает два значения (напряжение или ток) от ПЗС и опорное (рисунок 1.29), причем в зависимости от результата сравнения на его выходе формируется сигнал 0 (черный цвет) или 1 (белый).
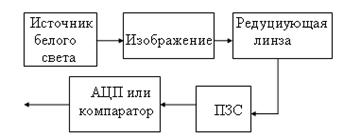
Рисунок 1.29 - Структурная схема черно-белого сканера
Цветные сканеры. Сканируемое изображение освещается уже не белым светом, а через вращающийся RGB-светофильтр (рисунок 1.30).
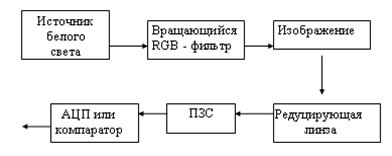
Рисунок 1.30 - Блок - схема цветного сканера с вращающимся RGB - фильтром
Для каждого из основных цветов (красного, зеленого и синею) последовательность операций не отличается от последовательности операций при сканировании черно-белого изображения.
У сканер ScanJet Не фирмы Hewlett-Packard источник белого света освещает сканируемое изображение, а отраженный свет через редуцирующую линзу попадает на трехполосную ПЗС через систему специальных фильтров, которые и разделяют белый свет на три компонента: красный, зеленый и синий (рисунок 1.31).
Рисунок 1.31 - Структурная схема сканера с dichroic - фильтрами
Аппаратные интерфейсы сканеров. Для связи с компьютером сканеры могут использовать специальную 8- или 16-разрядную интерфейсную плату, вставляемую в соответствующий слот расширения. Кроме этого, в настоящее время достаточно широко используются стандартные интерфейсы, применяемые в IBM РС-совместимых компьютерах (последовательный и параллельный порты, а также интерфейс SCSI).
1.6 Устройства графического ввода информации
Назначение и классификация устройств графического ввода информации. Устройства ввода графической информации характеризуются скоростью и точностью. Скорость определяется временем считывания и преобразования информации, а точность - способами отсчета текущих координат графического элемента и их реализацией.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
