

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
[11, 12, 13, 15, 17, 19, 20, 21, 22, 23], не может быть распространено на станки - качалки со схемами б и в, отличающиеся структурой механизмов и способом взаимодействия их звеньев. Более того, так как известные расчетные зависимости получены и зарекомендовали себя как корректные в определенном диапазоне конструктивных параметров, существующих станков – качалок, их применение даже для расчетов станка – качалки со схемой а с новым сочетанием конструктивных параметров, обеспечивающим увеличенную длину хода, требует обоснования. Тем более, они не могут быть применены для расчета параметров и характеристик рабочего процесса станков – качалок со схемой б, отличающихся наличием гибкой связи шатуна с балансиром, и станков – качалок со схемой в, кривошипно – шатунный механизм которых дополнен не только гибкой связью шатуна с балансиром, но и поворотной головкой, установленной на переднем плече балансира.
Поэтому, а также в связи с тем, что расчетные зависимости для определения параметров и характеристик рабочего процесса станков – качалок со схемами б и в не установлены, предлагается универсальный метод исследования работы станков – качалок рассматриваемых схем, основанный на определении текущих значений нагрузок в звеньях их механизмов в процессе совершения рабочего цикла при заданной внешней нагрузке в виде тягового усилия канатной подвески. Нагрузки определяются в относительных положениях звеньев механизма станка – качалки, соответствующих их взаимосвязанному движению, и последовательно отображающих полный цикл его работы.
Для обеспечения точности получаемых результатов и выводов, число таких положений должно быть достаточно большим. Поэтому, так как цикл работы станка – качалки происходит в пределах совершения ведущим звеном – валом кривошипов одного оборота, предложено разделить центральный угол поворота этого вала за один цикл, равный 3600, на 24 равные части с центральными углами по 150 каждая, и в 24 положениях звеньев, соответствующих 24 положениям кривошипов, выполнить силовой анализ механизмов. Так как угловая скорость кривошипов в течение цикла работы станка – качалки практически постоянна, полученные при этом зависимости нагрузки от положения кривошипов с достаточной точностью обеспечивают также отображение изменения нагрузок на звенья механизма во времени.
Для установления с необходимой точностью относительного расположения звеньев, соответствующего процессу их взаимосвязанного движения, предложено использование метода графического моделирования, позволяющее исключить неточности, связанные с вычислением этих положений аналитическими методами. Реальные возможности применения метода графического моделирования с этой целью обусловлены тем, что звенья механизмов станков – качалок не имеют излишних степеней свободы, которые создали бы неоднозначность их относительного расположения при заданных положениях кривошипов.
3.2 Расчетные схемы и конструктивные параметры станков – качалок. Принятые обозначения и расчетные модели силового анализа рабочих процессов
Расчетные схемы станков – качалок приведены на рисунке 3.2.1. На схемах расчетные положения кривошипов обозначены порядковыми номерами от 1 до 24, возрастающими в направлении вращения [46, 47, 81, 82, 83, 94].
При составлении уравнений силового анализа, в соответствии с общепринятыми допущениями, не учитывались [84, 85, 86, 87, 88, 89]:
- инерционные нагрузки масс – с учетом весьма малой частоты ходов станков – качалок;
- упругая деформация канатов, на 3-4 порядка меньшая происходящих при работе станка – качалки перемещений его элементов;
- сила тяжести элементов станков – качалок, за исключением противовесов.
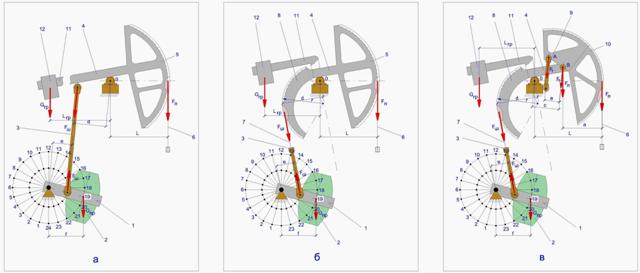
1 – кривошип; 2 – противовес; 3 – шатун; 4 – балансир; 5 – головка балансира; 6 – канатная подвеска устьевого штока; 7 – гибкая связь шатуна с балансиром; 8 – головка на заднем плече балансира; 9 – шарнирная тяга; 10 – поворотная головка балансира; 11 – исполнение балансира для комбинированного уравновешивания; 12 – груз
Рисунок 3.2.1 - Расчетные схемы станков-качалок
К исследованию были приняты станки - качалки с приведенными в таблице 3.2.1 конструктивными параметрами, установленными при их разработке [117].
Таблица 3.2.1 - Конструктивные параметры станков – качалок
Параметр | Схема станка – качалки | |||
а | б | в | ||
L, м | 5,75 | 3,822 | 3,840 | |
αб, град | 60 | 90 | 60 | |
Rкр, м | 1,45 | 1,215 | 0,854 | |
r, м | - | 2,0 | 2,0 | |
Р, м | 8,680 | 7,200 | 5,660 | |
Е, м | 3,600 | 2,100 | 1,770 | |
Rпр, м | 2,2 | 2,0 | 2,0 | |
Н, м | 14,2 | 13,6 | 12,0 | |
L1,м | 12,40 | 9,50 | 8,19 | |
В, м | 3,03 | 3,54 | 3,03 | |
lх, м | 6,0 | 6,0 | 6,0 | |
nх,1/мин | 6,0 | 6,0 | 6,0 | |
Кривошипное уравновешивание | Gпр, кН | 1,09 Q | 1,22 Q | 1,225 Q |
Комбинированное уравновешивание | Gгр, кН | 0,6272 Q | 0,695 Q | 1 Q |
lгрмакс, м | 5,0 | 3,0 | 3,0 | |
Gпр, кН | 0,370 Q | 0,448 Q | 0,438 Q |
Кинематические параметры станков – качалок (скорости движения и зависимости перемещения звеньев от времени, угловая скорость кривошипного вала и проч.), практически не чувствительны к изменениям моментов внешней нагрузки и к динамическим нагрузкам, характерным для станков – качалок. Это обусловлено большим передаточным числом передач, более чем в 100 раз снижающим размах колебаний нагрузки на валу; наличием в составе привода вращающихся с большой угловой скоростью масс со значительными моментами инерции массы и большим запасом кинетической энергии, стабилизирующим скорости вращения всех валов (массивный ведомый шкив клиноременной передачи на быстроходном валу редуктора; ротор электродвигателя и ведущий шкив на его валу); малой частотой ходов, обеспечивающей малую величину ускорений звеньев в результате кинематических закономерностей их движения; способностью электродвигателя реагировать на возрастание нагрузки на его валу увеличением создаваемого вращающего момента (в асинхронных электродвигателях – до 2,8 раз по сравнению с моментом номинальной нагрузки).
Это исключает необходимость сопровождения анализа силового взаимодействия звеньев механизма на основе уравнений статики уточнением их положения на основе решения уравнений динамики.
С учетом этого, анализ силового взаимодействия звеньев механизмов в каждом из рассматриваемых положений выполнен на основании следующих уравнений [97, 98].
В рассматриваемых схемах станков – качалок определяются на основе решения одинаковых уравнений:
- усилие в шатуне
 (3.2.1)
(3.2.1)
где: ![]() и
и ![]() – момент нагрузки на балансире и плечо ее приложения к шатуну.
– момент нагрузки на балансире и плечо ее приложения к шатуну.
- составляющая момента нагрузки на кривошипном валу, создаваемая внешней нагрузкой
![]() (3.2.2)
(3.2.2)
где: ![]() - плечо приложения нагрузки на шатуне к кривошипам;
- плечо приложения нагрузки на шатуне к кривошипам;
- составляющая момента нагрузки на кривошипе, создаваемая противовесом
![]() (3.2.3)
(3.2.3)
где: ![]() и
и ![]() – сила тяжести противовеса и плечо ее приложения к кривошипному валу.
– сила тяжести противовеса и плечо ее приложения к кривошипному валу.
- момент нагрузки на кривошипе

![]() - при рабочем ходе
- при рабочем ходе
(3.2.4)
![]() - при холостом ходе
- при холостом ходе
Момент нагрузки на кривошипном валу станка – качалки непостоянен – он меняется дважды от минимума до максимума и наоборот в течение цикла работы станка - качалки. В определенных пределах, это не представляет опасности для электродвигателя, так как одной из особенностей работы асинхронных трехфазных электродвигателей, обычно применяемых в приводах штанговых скважинных насосных установках, является возможность кратковременной работы с перегрузкой по вращающему моменту до 2,8 раз. Однако, длительной работы с перегрузкой электродвигатель не выдержит в связи с большим тепловыделением и перегревом его обмотки. Поэтому подбор электродвигателя заниженной номинальной мощности приведет к нарушению электроизоляции его обмотки в результате перегрева и к аварийному нарушению работоспособности.
С другой стороны, подбор электродвигателя из соображений соответствия номинальной мощности величине максимального за цикл изменения нагрузки сопротивления движению приведет к неоправданному завышению номинальной мощности и к повышенному расходу электроэнергии. Так как электродвигатель в приводе штанговых скважинных насосов работает в течение года практически непрерывно, перерасход электроэнергии будет весьма значительным, что ухудшит технико-экономические показатели работы штанговой скважинной насосной установки.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
