

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В связи с этим, важнейшим критерием определения необходимой номинальной мощности электродвигателя является допустимая интенсивность тепловыделения, пропорциональная среднеквадратичному моменту за цикл изменения нагрузки.
![]() - расчетный условно постоянный момент нагрузки на кривошипном валу за цикл работы станка – качалки, по величине которого определяется мощность электродвигателя:
- расчетный условно постоянный момент нагрузки на кривошипном валу за цикл работы станка – качалки, по величине которого определяется мощность электродвигателя:
где Мi , ti – переменное значение момента и время его действия, Т – длительность цикла работы привода, i, n – текущий номер по порядку и число расчетных положений механизма.
Эта формула соответствует расчетному случаю замены графика плавного криволинейного изменения нагрузки во времени ступенчатым со значениями Мi, соответствующими величине вращающих моментов в 24 положениях кривошипов.
Принимая отрезки времени ti действия этих моментов одинаковыми, получим:

Поэтому эквивалентный по тепловыделению в обмотке электродвигателя спектру действующих нагрузок расчетный момент для определения мощности электродвигателя и, соответственно, для оценки энергопотребления станка – качалки, принимается равным среднеквадратичному моменту на кривошипном валу, определяемому по формуле:
 , (3.2.5)
, (3.2.5)
- мощность электродвигателя определяется по формуле:
 (3.2.6)
(3.2.6)
- угловая скорость вращения кривошипа определяется по формуле:
 (3.2.7)
(3.2.7)
где: ![]() - частота качаний балансира станка-качалки, 1/мин;
- частота качаний балансира станка-качалки, 1/мин;
- к. п.д. станка-качалки определяется по формуле:
![]() (3.2.8)
(3.2.8)
где:
![]() ,
, ![]() - к. п.д. пары и число пар подшипников кривошипно-шатунного механизма станка-качалки;
- к. п.д. пары и число пар подшипников кривошипно-шатунного механизма станка-качалки;
![]() ,
, ![]() - к. п.д. ременной передачи и редуктора.
- к. п.д. ременной передачи и редуктора.
Основные отличия расчетов связаны с определением момента нагрузки на балансире от внешней нагрузки. В станках – качалках, выполненных по схемам а и б этот момент создается нагрузкой на канатной подвеске на балансире и которая определяется по формуле:
![]() (3.2.9)
(3.2.9)
при кривошипном уравновешивании, этот момент при комбинированном нагружении образуется в виде разности моментов от нагрузки на канатной подвеске и силы тяжести уравновешивающего груза и определяется по формуле:
![]() (3.2.10)
(3.2.10)
где:
![]() - усилие на канатной подвеске;
- усилие на канатной подвеске;
![]() - сила тяжести противовеса на балансире;
- сила тяжести противовеса на балансире;
![]() ,
, ![]() - плечи приложения усилий
- плечи приложения усилий ![]() и
и ![]() к балансиру.
к балансиру.
В станке качалке по схеме в при кривошипном уравновешивании этот момент определяется как момент от нагрузки, действующей в шарнире В соединения поворотной головки с балансиром, создаваемый на переднем плече балансира. Нагрузка в шарнире В представляет собой сумму векторов нагрузок на канатную подвеску Fп и на тягу FТ, перенесенных в центр шарнира В.
Поэтому
![]() (3.2.11)
(3.2.11)
где: с, L-a – плечи приложений нагрузок на тягу и канатную подвеску к балансиру.
Нагрузка ![]() на тягу, удерживающую поворотную головку от самопроизвольного поворота под действием усилия канатной подвески Fп, определяется из уравнения равновесия поворотной головки относительно точки В как центра поворота
на тягу, удерживающую поворотную головку от самопроизвольного поворота под действием усилия канатной подвески Fп, определяется из уравнения равновесия поворотной головки относительно точки В как центра поворота
![]()
![]() (3.2.12)
(3.2.12)
Где: а, в – плечи приложения нагрузок Fn и Fт к шарниру В.
Отсюда, ![]() (3.2.13)
(3.2.13)
С учетом этого, уравнение (3.2.11) приводится к виду:
 (3.2.14)
(3.2.14)
При комбинированном уравновешивании суммарный момент на балансире определяется с учетом составляющей, создаваемой силой тяжести груза:
 (3.2.15)
(3.2.15)
В уравнениях (3.2.9 - 3.2.15) значения Fп различны при рабочем и холостом ходах.
Fпр=Q- при рабочем ходе (3.2.16)
Fпр=Кх Q – при холостом ходе (3.2.17)
Нагрузку на канатную подвеску при рабочем ходе Fпр равна тяговому усилию привода Q, а Кх – коэффициент учета силы тяжести колонны штанг, составляющей части тягового усилия. Принято: Кх=0,6.
Эта разница нагрузок обусловлена тем, что нагрузка на устьевой шток и канатную подвеску от силы тяжести столба жидкости высотой от глубины расположения плунжера насоса до поверхности и с площадью сечения, равной рабочей площади плунжера насоса, являющаяся одной из составляющих нагрузки рабочего хода плунжера, при холостом ходе на плунжер насоса не действует.
Сила тяжести груза Gгр на балансире при комбинированном уравновешивании для рассматриваемых станков – качалок было определена из условия сохранения направления суммарной нагрузки на балансире при холостом ходе, характерного для режима работы с кривошипным уравновешиванием:
 (3.2.18)
(3.2.18)
где  (3.2.19)
(3.2.19)
Переменные значения плеч приложения нагрузок к звеньям кривошипно - шатунного механизма в 24 положениях, соответствующих 24 положениям кривошипа, определены методом графического моделирования [24, 48], позволяющим воспроизвести одновременные изменения относительного положения всех звеньев механизма и изменения его переменных параметров во взаимосвязи, соответствующей реальному процессу работы станка - качалки. Это позволило избежать использования упрощающих допущений, неизбежных при расчетах аналитическими методами.
3.3 Моделирование движения звеньев механизмов станков – качалок
Воспроизведение 24 положений звеньев механизма станка – качалки по схеме а с учетом того, что нижний шарнир шатуна перемещается по траектории в виде окружности с радиусом, равным радиусу кривошипа, а верхний – по дуге окружности, проведенной из центра, расположенного на оси шарнирной опоры балансира, а также того, что длина шатуна и, соответственно, расстояние между шарнирами его крепления к кривошипу и балансиру постоянны, большой сложности не представляет. Оно наглядно показано в самой расчетной схеме на рисунке 3.2.1 «а».
Однако, для станков – качалок схем б и в, включающих элемент гибкой связи шатуна с балансиром, построение положений звеньев связано с необходимостью отображения огибания гибкой связью профильной головки на заднем плече балансира с соблюдением условия постоянства суммарной длины шатуна и гибкой связи, с учетом укладки части длины последней в опорно – направляющий желоб профильной головки.
Это потребовало применение более сложного, чем для схемы а, метода графического моделирования с использованием физических моделей балансира, шатуна и гибкой связи [95, 98].
Наиболее сложная модель из рассматриваемых, модель кривошипно – шатунного механизма станка – качалки по схеме в, представленная на рисунке 3.3.1, состоит из моделей входящих в него элементов, преобразующих вращательное движение кривошипа в возвратно – поступательное движение канатной подвески устьевого штока.
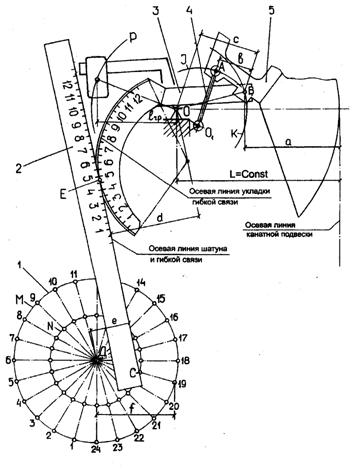
1 – траектории: J – шарнира соединения тяги с поворотной головкой; K – шарнира соединения поворотной головки с балансиром; N – нижнего шарнира шатуна; M – центра тяжести противовеса; Р – центра тяжести груза на балансире при комбинированном уравновешивании. 2 – линейка-модель шатуна и гибкой связи; 3 – модель балансира с неповоротной головкой; 4 – модель тяги; 5 – модель поворотной головки; 1÷24 – положения кривошипа; 1÷12 – деления гибкой связи и неповоротной головки
Рисунок 3.3.1 - Моделирование движения звеньев станка-качалки
(схема в)
Модель балансира с профильной головкой на его заднем плече представляет собой плоскую фигуру, изображенную на плотной бумаге и шарнирно закрепленную в точке плоскости, отображающей центр поворота балансира. Модель шатуна и его продолжения в виде гибкой связи представлена в виде прямолинейной линейки. Для воспроизведения совместного движения шатуна и балансира без проскальзывания и смещений гибкой связи относительно рабочей поверхности профильной головки на заднем плече балансира, на линейке – модели шатуна и профильной дуге модели головки на заднем плече балансира нанесены с одинаковым шагом и одинаково обозначены деления. Они должны совпадать между собой в точке Е касания линейки и дуги, отображающей на модели точку набегания на головку или сбега с нее гибкой связи.
Для воспроизведения положения звеньев механизма, соответствующих заданным положениям кривошипа, линейка – модель шатуна устанавливается риской С в фиксированной точке, соответствующей положению центра шарнира крепления шатуна на кривошипе, причем по касательной к профильной дуге головки на заднем плече балансира. Модель балансира устанавливается в положение совпадения делений на модели этой головки с одинаково обозначенными делениями линейки – модели шатуна.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
