


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При наблюдении небольшой стаи рыб (15-20 особей), становится очевидно, что в рамках самой стаи рыбы постоянно меняют свое положение. Так, например, голодные особи немного выбиваются вперед, хватают корм и затем постепенно отплывают к концу [10, 11].
Стадам парнокопытных животных присущи более простые закономерности, связанные с расположением внутри стада: одна часть животных, постоянно стремится быть впереди, другие предпочитают быть боковыми, третьи – центральными. Например, в стаде коров 27% животных предпочитают быть впереди, 10% сзади, 33% в гуще стада (центральная часть) [12]. Кроме того, некоторые животные предпочитают находиться на правой стороне, другие, аналогично, на левой. Однако, несмотря на это, значительное число коров встречается то тут, то там, не имея особых предпочтений.
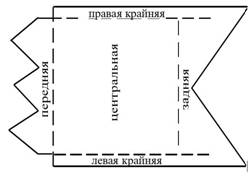
Рисунок 1 Предпочтение места в стаде ().
4. Процесс превращения группы в стадо или стаю
Одной из основных целей пастуха является поддержание животных в форме стада. Так, например, если он видит, что животные разбрелись – первое, что предпримет пастух, это сгонит их в плотную группу. Это делается для того, чтобы обрести контроль и власть над животными.
Животные, которые разбрелись по пастбищу, не будут подпускать к себе на близкое расстояние пастуха. Собрав животных воедино, пастух может к ним приблизиться или, например, заставить их двигаться в требуемом направлении. Животные, находясь в стаде, чувствуют безопасность и теряют самостоятельность. Стадо ведет себя как единый организм.
Для возникновения стада в обычных условиях требуется несколько минут. Например, олени, пасущиеся на склонах гор, в обычной ситуации разобщены. Стоит нам вспугнуть одно из них – реакции от других не последует. Однако если мы решим повторить этот эксперимент на равнине, где животные видят друг друга, последует ответная реакция от многих особей. В считанные минуты будет сформировано стадо, и животные будут перемешаться в его рамках, поскольку, находясь в стаде, они чувствуют себя более защищенными. В данном случае некогда свободные в выборе особи ожидают решения вожака стаи и следуют за ним.
Стадо (стая) остается единым до тех пор, пока сохраняются условия, при которых животные образовали группу и сблизились ближе, чем на индивидуальную дистанцию – испуг, например, от близости человека или при нападении хищников, при прохождении через узкий проход или пребывании в опасной ситуации вроде переправы через реку. Как только животные успокаиваются, начинают кормиться или отдыхать, как стадо рассыпается, поведение обособленных особей вновь становятся индивидуальным.
5. Цели и задачи моделирования толпы
Одной из основных целей моделирования толпы является описание поведения множества агентов в определенных условиях. Наиболее часто в качестве агента выступает именно человек. Аналогичным образом моделируется поведение косяков рыб, стай птиц и стад животных.
В наши дни моделирование толпы является развивающейся областью науки. Оно активно применяется в компьютерной графике, кинематографе, архитектурном и ландшафтном планировании. Необходимость расчета
пассажирского и транспортного потока породила особый класс
геоинформационных систем: симуляторов толпы, предоставляющих возможность измерения, оптимизации и визуализации подобных потоков.
В крупных городах наблюдается тенденция увеличения населения [13]. Однако многие городские объекты, магистрали и места массового пользования были спроектированы без учета значительного разрастания. Это приводит к образованию пробок и других транспортных проблем, мешающих корректному функционированию. Кроме того, в случае чрезвычайной ситуации, данная проблема может привести к непоправимым последствиям [14].
Благодаря своевременному использованию реалистичной модели поведения толпы, можно внести изменения в существующую систему. Благодаря моделированию можно получить следующие данные:
· Нахождение областей с высокой плотностью движения
· Подбор оптимального проекта с целью улучшения пропускной способности потока
· Моделирование возможных сценариев поведения толпы при проведении общественных мероприятий (в том числе в случае ЧП)
Методы реализации моделей поведения
В рамках данной дипломной работы будут рассмотрены следующие методы моделирования групп объектов (толпа, стадо, стая и т. п.):
· Метод, основанный на физических процессах динамики газов и жидкостей. Каждый из агентов выступает в роли частицы, описываемой уравнениями динамики (например, уравнением Бернулли) [15].
· Мультиагентный метод моделирования. В данном случае создается набор правил взаимодействия агентов между собой, вместо классического описания самой сущности системы [16, 17].
· Метод на основе клеточных автоматов. Область действия агентов в данном случае представляется в виде клеточной матрицы с определенными правилами перехода [18].
· Использование механики Ньютона. Социальные воздействия, исходящие от окружающих агентов, выражаются в виде сил. Движение объекта описывается на основе второго закона Ньютона [19].
· Разнообразные комбинации методов, указанных выше.
Далее более подробно рассмотрим некоторые из этих методов.
1. Метод на основе клеточных автоматов
Впервые клеточные автоматы были предложены в работах Фон Неймана [20], как дискретные динамические системы, состоящие из пространственной клеточной матрицы. Данный метод изменяет состояние автомата при каждом дискретном шаге таким образом, что значение в клетке вычисляется исходя из значений окружающих клеток. Так, значение отдельно взятой клетки вычисляются исходя из значений окружающих клеток, полученных на предыдущем шаге.
На текущий момент клеточные автоматы активно применяются во многих областях науки и техники. В рамках данной работы будут рассмотрены два основных метода моделирования с использованием клеточных автоматов:
· Когда агенты взаимодействуют друг с другом. Используются стохастические модели на основе клеточных автоматов. Примером использования данной модели является исследование в области моделирования эффектов трения агентов при эвакуации [21]
· Когда агенты взаимодействуют с окружающей их средой. Данный метод используется в реализации двумерного клеточного автомата, предложенного в работах Zhao D. L. [3]. Этот же метод использует в своих исследованиях Varas [22] для создания модели эвакуации с учетом препятствий.
Узлом пространственной решетки клеточного автомата принято называть клеткой. Близлежащие узлы – соседи. Выбор соседей может отличаться в зависимости от той или иной интерпретации. Изменение состояния клетки в зависимости от состояния соседей называется правилом клеточного автомата.
Для описания поведения группы агентов клеточный автомат
должен, иметь два состояния клетки, соответствующие наличию и отсутствию в этой точке агента, и учитывать две составляющие движения
группы - хаотичную и направленную.

Рисунок 2 Поведение стада при выходе из загона
На рисунке 1 представлен типичный случай поведения стада при покидании загона. Заметно увеличение плотности в узких местах, появление заторов [23].
Плюсами метода моделирования поведения с использованием клеточных автоматов несомненно является его простота реализации и упрощенная реализация правил. Благодаря этому данный метод довольно часто применяется в компьютерной графике. Однако, несмотря н кажущуюся простоту, клеточные автомат демонстрируют высокий уровень соответствия реалистичному поведению [24].
Минусом данного метода является дискретность поведения агентов (как в пространстве, так и в поведении). Обычно в данном методе группа агентов представляется однородной, однако в реальной жизни это невозможно, поскольку у каждого участника группы, несмотря на частичную потерю индивидуальности, всегда есть набор индивидуальных параметров (например, скорость реакции, вектор движения, скорость движения).
2. Метод на основе непрерывных моделей
Поскольку расстояние между агентами группы значительно меньше чем площадь наблюдаемой зоны, на которой перемещаются эти агенты, группа может быть представлена в виде непрерывной модели (континуума).
На направление и скорость движения оказывают влияние определенные характеристики движения агентов. При получения уравнения движения следует учитывать следующие условия [15]:
1) У каждого агента есть цель к которой он стремится.
2) Скорость движения агента определяется плотностью толпы, окружающей обстановкой и характеристиками поведения.
3) Агенты скорейшим образом стремятся к своей цели.
Данные условия ведут к основному уравнению движения агента в
потоке толпы для двухмерного случая:
![]()
где ![]() – время до окончания движения,
– время до окончания движения, ![]() – плотность толпы,
– плотность толпы, ![]() – скорость агентов как функция от плотности толпы,
– скорость агентов как функция от плотности толпы, ![]() – дискомфорт как функция от плотности иолпы,
– дискомфорт как функция от плотности иолпы, ![]() – координаты агента и время. Из этого уравнения можно сделать вывод, что моделирование группы агентов имеет сходства с моделированием потоков жидкости (без учета трения).
– координаты агента и время. Из этого уравнения можно сделать вывод, что моделирование группы агентов имеет сходства с моделированием потоков жидкости (без учета трения).
Достоинством данного метода является возможность описания группы объектов как динамической среды.
3. Метод на основе броуновского движения
Модель поведения группы агентов можно представить в виде системы дифференциальных уравнений, основанных на уравнении Фоккера-Планка [24]:
![]()
В данном уравнении ![]() - вектор сноса,
- вектор сноса, ![]() - тензор диффузии.
- тензор диффузии.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
