


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Критерий для i-ого участка толпы выглядит так:
![]()
где ![]() – добавочная стоимость (динамически зависящая от текущего и
– добавочная стоимость (динамически зависящая от текущего и
прошлого положения препятствий и окружающих соседей), ![]() – маргинальная стоимость, которая зависит от плотности толпы.
– маргинальная стоимость, которая зависит от плотности толпы.
Однако использование данного метода без комбинации с другими методами не всегда реалистично [24]. Так, например, при возникновении маловажной цели, толпа будет двигаться случайно и хаотично, однако в реальном мире при пропадании объекта внимания, толпа либо нашла другой объект, либо стояла бы на месте в ожидании.
4. Метод с использованием Ньютоновской механики
Движение каждого агента группы происходит под воздействием некоторых сил – помимо физических силы, это могут быть и психологические силы. Каждая из этих сил вынуждает агента двигаться с определенным ускорением [25].
Кроме того, желаемая скорость агента не всегда совпадает с его реальной скоростью. Так, например, если агент оказался в опасности – его желаемая скорость будет максимальна по модулю и направлена в сторону, противоположную опасности. И для того чтобы разогнаться до этой скорости (или в случае необходимости замедлиться) требуется время.
Для вычисления сил между агентами необходимо учесть также то, что даже при отсутствии физического контакта между двумя агентами существует некое "психологическое отталкивание", т. е. желание находиться подальше друг от друга [25]. И при контакте возникает радиальная сила давления, пропорциональная скорости агентов. Это похоже на то, как люди, движущиеся с разными скоростями на небольшом расстоянии, часто задевают друг друга, тем самым замедляя.
В результате получим уравнение, описывающее движение i-ого человека
![]()
Vi текущая скорость, Vio желаемая скорость, fij сила отталкивания двух агентов, fiw сила взаимодействия агента со стеной.
Результаты испытания, проведенного в работах [24] по данному методу:
1) Был зафиксирован переход от простого неупорядоченного движения к толпе и возникновению давки около выхода. Пока "желаемая" скорость покидания помещения была меньше 1,5 м/с, движение людей было относительно организованным. При больших скоростях сила, "толкающая" человека к выходу, превышала взаимное психологическое отталкивание между людьми, в игру вступал непосредственный физический контакт, возникала давка, лавинообразно образовывалась толпа.
2) Эффект, "чем быстрее, тем медленнее". Это значит, чем быстрее люди хотят покинуть комнату (т. е. чем выше "желаемая" скорость), тем медленнее толпа проходила через дверь: люди, находящиеся непосредственно у выхода, мешали друг другу.
3) Когда "желаемая" скорость возрастала еще больше, и сила взаимодействия людей превышала критическую, давление в толпе стало приводить к травмам отдельных людей. В рамках этой модели, травмированный человек превращался в неподвижное препятствие, это приводило к еще большим заторам, и в результате количество человек, успевших покинуть комнату за определенное время, резко уменьшалось.
Создание алгоритма поведения
В рамках данной главы рассмотрен процесс создания алгоритма поведения. При этом, наиболее важной целью будет именно процесс реализации изменения направления агентов и поиска цели. Следующей по важности является процесс перемещения и изменения скорости. Для более удобной реализации, моделирование перемещения будет инкапсулировано в процесс изменения направления.
Поскольку в качестве агента могут выступать самые разнообразные объекты (так как рассматриваются стада, стаи, косяки и т. п.), он будет представлен в виде обычной материальной точки. За счет этого мы избавимся от инерционной составляющей в алгоритме и сумеем сохранить универсальность и обобщенность алгоритма. В дальнейшем, для частных случаев, материальная точка может быть заменена другими объектами. Для этого будет достаточно заменить объект и добавить несколько индивидуальных параметров.
Исходя из этого, будет достигнута цель получения универсального алгоритма поведения (который в дальнейшем с использованием минимальных ресурсов может быть доработан для каждого индивидуального случая).
1. Поиск объекта
Поиск объекта является базовым элементом алгоритма поведения. В качестве целевой координаты в данном случае выступает определенная точка (либо область) в пространстве. При этом направление движения агента соответствует кратчайшему направлению к целевой точке [26].
При достижении целевой точки (либо области), агент может вызвать какое-либо действие. В этом случае он перейдет к следующей части алгоритма.
Если же никакое действие не будет вызвано, агент сохранит целевое направление и пройдет сквозь цель. После следующей корректировки направления, агент развернется и вновь пройдет сквозь цель.
Данный метод алгоритма может быть использован для поиска агентом чего-либо. В рамках стада, данный метод должен применяться вкупе с другими методами во избежание разрозненного поведения [27]. Однако, в том случае, если животное окончательно отбилось от стада, оно может применять этот метод алгоритма в чистом виде (так как влияние со стороны стада отсутствует).
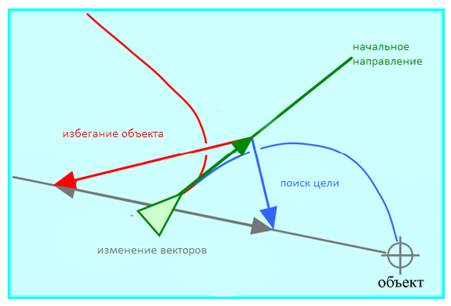
Рисунок 3 Поиск и избегание объекта
2. Избегание объекта
Избегание объекта является элементом алгоритма, противоположным поиску цели. В данном случае агент выбирает направление, противоположное объекту, который он избегает.
Действие в данном случае можно вызывать после достаточного отдаления от объекта, который агент старается избежать. Либо, например, по прошествии определенного времени, в течение которого агент осуществлял движение в противоположную сторону (время бегства).
Аналогично поиску, данный метод должен быть комбинирован с другими методами группового поведения [28]. Например, несколько членов стада приблизились к какому-либо объекту, и он начал издавать отпугивающий звук. В данном случае находящиеся рядом агенты испугаются и начнут движение в противоположную сторону. Далее приближаясь к стаду, их движение будет замечено остальными участниками. В зависимости от количества бегущих, произойдет лавинообразный эффект: либо бегство заразит все стадо, и оно начнет движение в сторону (если бегущих много); либо бегство постепенно угаснет, частично сдвинув агентов вблизи избегаемого объекта (бегущих мало).
3. Преследование движущегося объекта
Данный элемент алгоритма имеет черты, похожие на метод поиска объекта. Отличием является то, что в данном случае целевой объект движется. Для более реалистичного поведения мы должны прогнозировать дальнейшее движение нашей цели.
При прогнозировании будем предполагать, что объект сохранит прямолинейное движение. На практике же, прогноз не всегда является верным, поскольку движущийся объект может совершать самые разнообразные маневры. Исходя из этого, прогноз должен регулярно проходить корректировки [28].
Поскольку объект находится в стаде, влияние на него будет оказывать как целевой объект, так и окружающие его агенты (стадо). Агенты будут сохранять комфортный для преследования боковой интервал и дистанцию. Основное влияние на вектор движения будет оказывать преследуемый объект, второстепенное влияние окажет окружающие агенты.
4. Избегание движущегося объекта
Метод алгоритма аналогичен преследованию объекта, за исключением того, что вместо движения за объектом используется бегство от него. Таким же образом производится прогноз движения и корректировка собственного курса агента [28].
Более того, в данном случае вступают в дело стадные чувства. При возникновении опасности, агенты сокращают дистанцию между собой, образуя более плотное скопление. Поскольку агенты находятся на небольшом расстоянии, если объект опасности окажется достаточно близко, стадо начнет синхронное бегство от него (в зависимости от размера стада, это может быть, как его часть, так и все оно).
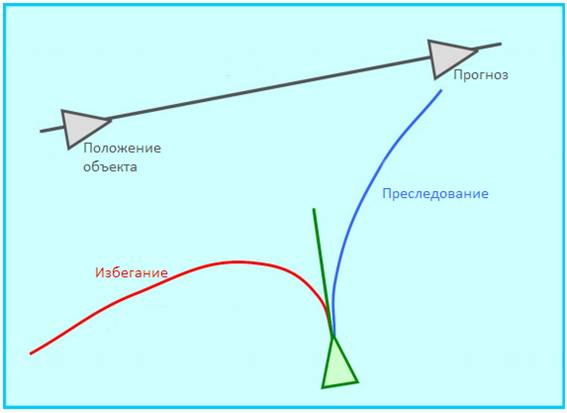
Рисунок 4 Поиск и избегание с прогнозом
5. Бегство от преследователя
Следует упомянуть частный случай избегания динамического объекта, когда бегство осуществляется от преследователя. В данном случае помимо движения в противоположную сторону, агент может выполнять разнообразные маневры и уклонения, тем самым усложняя свою поимку [29].
Кроме того, стадный инстинкт призывает агента двигаться к стаду, тем самым вызывая его лавинообразное движение (агенты, к которым приближается преследователь аналогично обращаются в бегство, затем это бегство наблюдают остальные и присоединяются) [11]. При всем этом, агенты осознают состояние окружающей опасности и стараются держаться ближе друг к другу.
Рисунок 5 Пример бегства от хищника в косяке рыб [11]
6. Случайное движение
Метод случайного движения моделирует процесс блуждания объекта. Однако, нельзя использовать случайное изменение вектора на каждом шагу, поскольку в таком случае движение будет нереалистичным и дерганным. Для достижения большей реалистичности можно с некоторой периодичностью суммировать вектор текущего направления и случайный сгенерированный вектор.
Для упрощения генерации вектора корректировки движения, в качестве области его генерации можно использовать окружность [30]. Благодаря этому, можно добиться плавности изменения направления движения, плавности изменения скорости и масштабируемости максимального отклонения. Таким образом, при каждой корректировке, посредством текущего вектора движения и сгенерированного, меняется и направление, и скорость движения.
Данный метод также рекомендуется комбинировать с методами группового поведения.
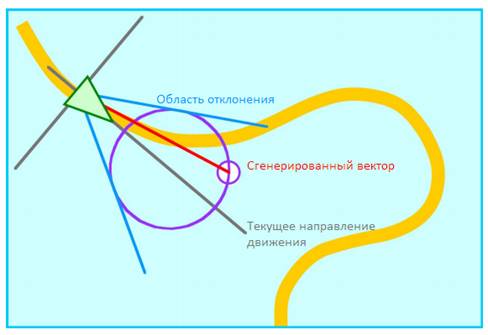
Рисунок 6 Пример случайного движения
7. Избежание столкновений в толпе
Благодаря этому методу алгоритма, агентам в группе удается двигаться в разных направлениях, и при этом, не сталкиваться. Для лучшего понимания представим толпу людей во время празднования какого-либо массового праздника. Один из агентов (в данном случае человек) движется к своим знакомым (цель) через толпу. При этом он анализирует направления движения окружающих его агентов и соответствующим образом корректирует свой курс. Для проведения корректировки может использоваться изменение направления движения, ускорение или замедление.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
