

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, , Cергеев управления совместным поведением интеллектуальных агентов в пространстве // Материалы 9-й Конференции «Информационные технологии в управлении» (ИТУ-2016), Санкт-Петербург, 4-6 октября 2016. Санкт-Петербург, 2016. С.311-216.
АЛГОРИТМЫ УПРАВЛЕНИЯ СОВМЕСТНЫМ ПОВЕДЕНИЕМ ИНТЕЛЛЕКТУАЛЬНЫХ АГЕНТОВ В ПРОСТРАНСТВЕ
1, 2, 3, 1
1Университет ИТМО, Санкт-Петербург, 197101, пр. Кронверкский, 49,
Тел.: (812)595-41-28 E-mail: bushuev@inbox.ru,
2Акционерное общество «Концерн Океанприбор» Санкт-Петербург, 197376, Чкаловский пр., дом 46.
Тел.:(812)-320-80-49. E-mail: Vladimir.s.vorobev@gmail.com
3Институт биологии внутренних вод РАН им. ,152742, Ярославская обл., Некоузский р-н,
п. Борок, Тел. (48547)24042 E-mail: *****@***yaroslavl. ru
Аннотация. Рассматрено взаимное поведение двух интеллектуальных агентов как гомеостатическая система, в которой возможны типовые режимы поведения агентов, такие, как согласие, нейтралитет, конкуренция, преследование. Предложены дискретные математические модели движения агентов в «запаховом» поле, использующие уравнения эволюции биологических систем и задающие тенденции пошаговых поворотов в трехмерном пространстве.
Ключевые слова: интеллектуальные агенты, гомеостат, согласие, нейтралитет, конкуренция, преследование
Введение.
Целью работы является исследование алгоритмов управления поведением интеллектуальных агентов в трехмерном пространстве. Особенность заключается в том, что система агентов рассматривается как компенсационный гомеостат [1,2], состоящий из двух агентов одного уровня иерархии. Взаимное поведение агентов может быть отнесено к немногочисленным типовым ситуациям, таким, как согласие, нейтралитет, конкуренция, преследование. Кроме двух агентов в систему входит третий объект, который влияет на их поведение. Этот объект может рассматриваться как некоторое поле, например, по аналогии с биологическими системами, поле запаха или «запаховое» поле, в котором движутся интеллектуальные агенты подобно летающим насекомым. Поле задается расположением в нём аттрактантов и репеллентов, т. е. притягивающих и отталкивающих множеств, характерных для хемотаксиса бактерий [3].
Гомеостат поиска на плоскости.
С математической точки зрения движение интеллектуальных агентов рассматривается как поиск аттракторов. Пошаговый алгоритм поиска воспроизводится динамической моделью простейших биологических систем. Для описания каждого из агентов используется дискретное логистическое отображение. Двумерная модель поиска на плоскости известна из [4]
![]() (1)
(1)
где координаты R и L задают тенденции к поворотам агента вправо и влево на i-ом шаге. Система уравнений (1) относится к уравнениям развития популяций [5], в которой произведения координат в правых частях определяют воспроизводство новых тенденций поворотов вправо или влево, а координаты в первой степени задают умирание старых тенденций поворотов. Через коэффициенты λ в систему (1) вносятся шумы, обеспечивающие случайность поиска, а также перекрестные связи между каналами R и L, и управляющие воздействия, которые зависят от функции S=S(i), задающей запаховое поле.
Система уравнений (1) образует компенсационный гомеостат, в котором реализуется закон единства и борьбы антагонистов, или противоположных тенденций поворотов агента вправо и влево. В силу случайности поиска гомеостат обладает избыточностью движений, что характерно для биологических систем.
Устойчивость движений в гомеостазе зависит от перекрёстных связей между каналами и от параметров каналов. Необходимым условием устойчивости является так называемое «зеркальное склеивание» каналов [1], когда один антагонист (канал) входит в отрицательную обратную связь другого. Достаточным является условие того, что несимметрия по параметрам не превышает определенной величины.
Гомеостат поиска в трехмерном пространстве.
Будем считать, что гомеостат (1) задает движение агента в горизонтальной плоскости. Для перехода к пространственному поиску введем аналогичный гомеостат, задающий движение агента в вертикальной плоскости. Тогда поисковая модель будет иметь две пары дискретных логистических отображений, вырабатывающих тенденции к поворотам в вертикальной (тенденции к повороту вверх U и к повороту вниз D) и горизонтальной (к повороту вправо R и влево L) плоскостях:
 (2)
(2)
Чтобы система (2) была устойчивой, вводятся ограничения на параметры , где параметры определяются следующим образом:
, где параметры определяются следующим образом:
 (3)
(3)
где μ – константа, ![]() – белые шумы, ранжированные в области [-1;1] с амплитудой σ, K – коэффициент влияния приращения функции запаха, δS(i) – относительное приращение функции запаха на очередной итерации:
– белые шумы, ранжированные в области [-1;1] с амплитудой σ, K – коэффициент влияния приращения функции запаха, δS(i) – относительное приращение функции запаха на очередной итерации:
![]() (4)
(4)
Результирующие углы поворотов в вертикальной θ и горизонтальной φ плоскостях определяются соответствующими тенденциями
![]() (5)
(5)
Система (5) также представляет собой компенсационный гомеостат, антагонистами которого являются повороты агента в горизонтальной и вертикальной плоскостях. Для определения движения агента в трехмерном пространстве с координатами x,y,z необходимо «склеить» уравнения в (5), введя в них перекрестные связи. Для этого вектор положения агента в трехмерном пространстве проектируем на оси x,y,z с помощью синусов и косинусов углов поворота в горизонтальной и вертикальной плоскостях
 (6)
(6)
где r – длина шага поискового агента в каждой итерации.
Функция запаха вводится в трехмерном пространстве S=S(x,y,z). Фактически она является выигрышем в двойной гомеостатической игре, которая впервые рассматривалась [7]. Цель игры – нахождение экстремума S= S(x,y,z). Ходами двухсторонней игры во внутренних гомеостатах являются с одной стороны – повороты агента влево, с другой стороны – повороты агента вправо для горизонтальной плоскости, а для вертикальной плоскости ходами являются с одной стороны – повороты агента вверх, с другой стороны – повороты агента вниз. При моделировании функция запаха задается в виде
![]() (7)
(7)
Таким образом, агент начинающий поиск от произвольных начальных значений координат ![]() , и максимизирующий свою платежную функцию при достижении начала координат x=y=z=0 получает максимальный выигрыш.
, и максимизирующий свою платежную функцию при достижении начала координат x=y=z=0 получает максимальный выигрыш.
Типовые ситуации в системе из двух агентов.
Пусть имеется система из двух интеллектуальных агентов, движение каждого из которых в системе координат x,y,z представлено уравнениями типа (6):
 (8)
(8)  (9)
(9)
где ![]() - координаты движения первого агента,
- координаты движения первого агента, ![]() - координаты движения второго агента.
- координаты движения второго агента.
В соответствии [1,8] введем в рассмотрение четыре типовые ситуации взаимодействия или игры агентов:
1. Согласие
2. Нейтралитет
3. Конкуренция
4. Преследование
Будем рассматривать согласие как игру взаимного поиска агентов и для её организации введем две платежных функции ![]() для первого агента и
для первого агента и  для второго агента. Поместим максимум функции
для второго агента. Поместим максимум функции ![]() в точке нахождения второго агента, а максимум функции
в точке нахождения второго агента, а максимум функции ![]() - в точке нахождения первого агента. Применительно к виду экспоненциальной функции запаха типа (7) получаем
- в точке нахождения первого агента. Применительно к виду экспоненциальной функции запаха типа (7) получаем
 (10)
(10)
Таким образом, максимумы запаха каждой функции будут перемещаться в пространстве, а агенты будут стремиться друг к другу.
Для организации игры типа «нейтралитет» каждый из агентов должен иметь свою, стационарную в пространстве функцию запаха, с максимальными значениями в разных точках пространства, а кроме того, агенты при движении не должны встречаться. Для реализации нейтралитета предлагаются следующие платежные функции
 (11)
(11)
При максимизации своих платежных функций первый агент будет притягиваться к точке расположения своей «еды» с координатами a,b,c, и отталкиваться от максимума функции запаха второго агента, второй агент будет притягиваться к точке расположения своей «еды» с координатами d,e,f, и отталкиваться от максимума функции запаха первого агента.
Для организации игры типа «конкуренция» введем одну точку максимума запаха для обоих агентов (для простоты, в начале координат), к которой они должны притягиваться. Кроме того, учтем, что агенты одновременно должны отталкиваться друг от друга. Тогда их платежные функции получаются из выражения (11) при условии a=b=c=d=e=,f=0
 (12)
(12)
Для игры типа «преследование» предположим, что первый агент догоняющий, а второй – убегающий. Тогда первый агент должен притягиваться к максимуму функции запаха второго агента, а второй агент должен отталкиваться от максимума функции запаха первого агента. Следовательно, платежные функции в игре назначаем в виде
 (13)
(13)
Пример моделирования ситуации «согласие».
Моделирование проводилось со следующими параметрами:  ,
, ![]() ,
, ![]()
![]() мощность шума σ=2.8, шаг дискретизации модели dt=0.05.
мощность шума σ=2.8, шаг дискретизации модели dt=0.05.
Результат моделирования представлен на рис.1.
Рис. 1. Сближение агентов в ситуации «согласие»
Как видно из рисунка 1, два агента начинают сближение к началу координат и, войдя в окрестности друг друга, свободно блуждают в этих окрестностях. Из-за шума агенты не фиксируются в определенной точке пространства, а продолжают совместное движение, подобное дрейфу. Отклонение каждого из агентов от начала координат определяется квадратичными нормами
![]() ,
,![]() .
.
Графики изменения норм приведены на рисунках 2 и 3 для первого и второго агентов соответственно.
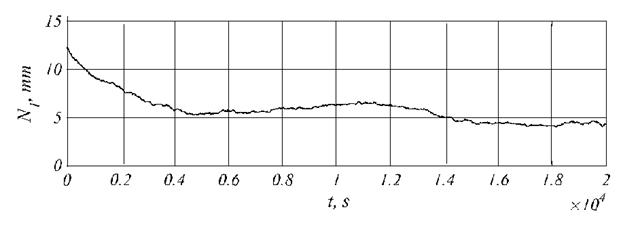
Рис.2. График квадратичной нормы вектора координат первого агента
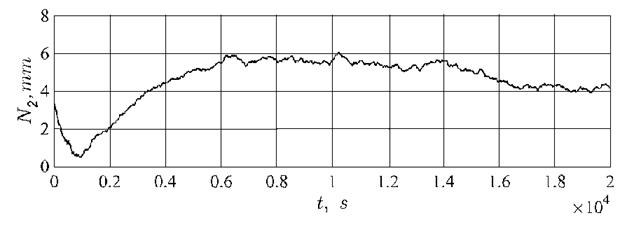
Рис.3. График изменения квадратичной нормы вектора координат второго агента
Из рисунков 2 и 3 видно, что с течением времени нормы векторов приходят приблизительно к одному значению и колеблются вокруг него, т. е. агенты находятся в окрестностях одной и той же точки пространства.
Для оценки схождения интеллектуальных агентов используется такой показатель, как норма разности векторов их координат:

График изменения нормы N приведен на рисунке 4.
Рис.4. График квадратичной нормы вектора разности координат
Из графика на рисунке 4 видно, что под управлением предложенного алгоритма агенты сближаются и колеблются в окрестностях друг друга в пределах некоторой области.
Заключение.
Используя предложенные алгоритмы можно смоделировать мультиагентную систему с числом агентов больше двух, как подвижных, так и неподвижных, рассматриваемых как источники «еды». С увеличением числа агентов возрастает и количество ситуаций или стереотипов взаимного поведения, например, возможно образование ассоциаций агентов, для которых придётся решать задачи управления объединениями агентов.
ЛИТЕРАТУРА
1. Гармония и дисгармония живых, природных, социальных и искусственных систем. Иркутск: Изд-во ИГЭА, 1998. 337с.
2. , Хаотические гомеостаты // Изв. вузов. Приборостроение. 2007. Т. 50, N 11. С. 59-63.
3. Хемотаксис бактерий.// Биология. Соросовский образовательный журнал. 2001.Т.7, № 9, С.23-29.
4. Модели автономного поискового поведения // От моделей поведения к искусственному интеллекту / Коллективная монография под общ. ред. М.: УРСС. 2006. С. 200-242.
5. Марри Дж. Нелинейные дифференциальные уравнения в биологии. Лекции о моделях. М.: Мир, 1983. 400 с.
6. , , Поведение агента, заданное логистическим отображением // Изв. вузов. Приборостроение. 2015. Т. 58, № 8. С. 600-605.
7. Системно-информационный анализ процессов управления. Новосибирск: Наука, 1988. 327 с.
8. Математическое моделирование процессов технического творчества. Учебное пособие. СПб.: Изд-во СПбГУ ИТМО, 2011. 181 с.
