

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Глава 2 Автоматический радиокомпас
Автоматическим радиокомпасом (АРК или ADF) называют бортовой автоматический радиопеленгатор, позволяющий непрерывно определять курсовой угол радиостанции (КУР).
Курсовым углом радиостанции принято называть угол в горизонтальной плоскости между продольной осью ВС и направлением на радиостанцию (рис.9).

Рисунок 9 – К задаче определения КУР
Пеленгуемая радиостанция может быть специальной: называемой приводной радиостанцией (ПРС) или ненаправленным радиомаяком (NDB), или обычной широковещательной радиостанцией (ШВРС). АРК позволяет осуществлять контроль пути по направлению и вывод ВС судна в точку размещение ПРС (NDB), определять место ВС по двум пеленгам (рис. 1б), фиксировать момент пролета ПРС, (осуществлять вместе с другими приборами) заход на посадку, принимать информацию от диспетчеров службы движения при отказе на борту всех основных средств связи. Специальные типы АРК (АРК-У2, АРК-УД) могут использоваться для вывода поисковых ВС в точку нахождения ВС, потерпевшего аварию.
Современные АРК работают в международном диапазоне частот 150-1799,5 кГц. В составе ПНК автоматизированного СВЖ АРК является резервным средством навигации, с помощью которого можно определять координаты ВС, навигационные параметры полета и вести контроль пути по направлению, а иногда по дальности. Обычно на ВС устанавливается два комплекта АРК.
Первые модели АРК имели поворотную рамочную антенну (АРК-5, АРК-9). В более совершенных АРК используется гониометрическая антенная система (АРК-15М), обеспечивающая электронное вращение ДН неподвижной рамочной антенны. Первое поколение АРК строились по замкнутой схеме. В современных АРК используются безгониометрическая схема и неподвижная рамочная антенна, а также построение по разомкнутой схеме.
Принцип действия АРК
Ранние модели АРК были выполнены по схеме с поворотной рамкой. Эта схема подразумевает прием сигналов пеленгуемой радиостанции двумя антеннами – ненаправленной и направленной (рамочной). Диаграммы направленности направленной и ненаправлнной антенн, а также суммарная ДН приведены на рис.10.

Рисунок 10 – Диаграммы направленности рамочной антенны, ненаправленной антенны и суммарная (кардиоида)
После входа в зону действия приводной радиостанции, направленная антенна начинает вращаться с помощью электродвигателя до тех пор, пока нормаль к плоскости витков рамочной антенны не совпадает с направлением от самолета на пеленгуемую радиостанцию, что и позволяет получить курсовой угол радиостанции. Ось рамочной антенны через компенсатор радиодевиации связана с сельсинной индикаторной системой, с помощью которой угловое положение рамочной антенны дистанционно передается на индикатор курсовых углов.
В более поздних АРК применена гониометрическая антенная система, предаставляющая собой неподвижную рамочную антенну, сопряжаемую с гониометром с помощью высокочастотного кабеля. Рамочная антенна выполнена в виде двух взаимно перпендикулярных обмоток на одном общем магнитодиэлектрическом сердечнике из феррита и помещена в специальном углублении фюзеляжа самолета, закрытом радиопрозрачным материалом.
Диаграмма направленности рамочной антенны в горизонтальной плоскости имеет форму двух взаимно перпендикулярных восьмерок (рис.11). Каждая обмотка антенны имеет два направления нулевого приема. В момент перехода через направление нулевого приема фаза ЭДС на выходе рамки изменяется на 180°.
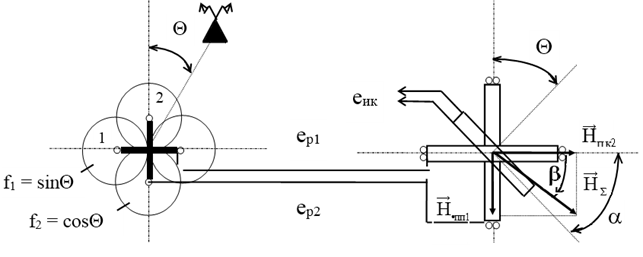
Рисунок 11 – Гониометрическая антенная система
Передача ЭДС от рамочной антенны в приемник АРК осуществляется с помощью гониометра – бесконтактного индукционного преобразователя. Конструктивно гониометр состоит из двух взаимно перпендикулярных статорных катушек, связаных с соответствющими обмотками рамочной антенны, и одну роторную катушку (называемой также искательной катушкой ИК), находящуюся внутри статора. Роторная катушка может поворачиваться в пространстве внутри статорных катушек с помощью миниатюрного электродвигателя.
Рамочная антенна АРК производит прием вертикально поляризованной плоской радиоволны, а создаваемое полевыми катушками гониометра результирующее магнитное поле является аналогом (моделью) внешнего поля, воздействующего на рамочную антенну.
Напряжение на выходе искательной катушки гониометра зависит от направления прихода радиоволн, изменяясь при этом по закону sin(a-Q). Такой закон соответствует диаграмме направленности в виде восьмерки с двумя четко выраженными направлениями нулевого приема.
Вращение искательной катушки эквивалентно вращению рамочной антенны, при котором происходит поворот ее диаграммы направленности. Положение искательной катушки, когда Q = a и при котором напряжение на её выходе равно нулю, соответствует отсчету КУР.
Принципы построения АРК
Автоматические радиокомпасы могут строиться как следящие системы замкнутого или разомкнутого типа по схеме с балансной модуляцией.
На рис.12 показана обобщенная структурная схема АРК замкнутого типа. По такому принципу построены АРК-15М и АРК-22.
АРК замкнутого типа представляет собой автоматическую следящую систему. Входным воздействием следящей системы является текущий КУР Q, а выходным воздействием - угол поворота ИК гониометра a. Сигнал рассогласования следящей системы при этом равен DQ = Q - a.

Рисунок 12 – Обобщенная структураная схема АРК
Сигнал, снимаемый с блока рамочных антенн (БРА), поступает на гониометр (Г) и далее на усилитель высокой частоты, размещенный в рамочном согласующем устройстве (РСУ) и оканчивающийся фазоинверсным каскадом на угол p/2. Усиленный и соответствующим образом сфазированный сигнал с выхода фазоинверсного каскада подается на коммутатор фазы - балансный модулятор (БМ), управляемый напряжением uГНЧ генератора низкой частоты (ГНЧ). Фаза высокочастотного напряжения на выходе балансного модулятора периодически изменяется на 180° с частотой FГНЧ (в АРК-15М FГНЧ = 135 Гц,
в АРК-22 FГНЧ = 90 Гц) в моменты его перехода через нуль.
Напряжение uА с выхода ННА после предварительного усиления
в согласующем усилителе поступает одновременно с выходным напряжением БМ в контур сложения (КС). Учитывая, что в РСУ сигнал РА сдвигается по фазе на p/2, на входах КС сигналы находятся в фазе или противофазе.
В результате сложения таких сигналов на выходе КС образуется амплитудно-модулированный сигнал uКС. Наличие амплитудной модуляции
у результирующего сигнала свидетельствует о том, что направление прихода радиоволн не совпадает с направлением нулевого приема направленной антенной системы.
Поскольку амплитудно-модулированный (АМ) сигнал образуется в самом приемнике АРК в результате сложения сигналов ННА и РА, имеет место так называемая внутренняя амплитудная модуляция.
Рассматривая зависимость глубины модуляции и фазы огибающей результирующего сигнала на выходе КС от угла Q, можно говорить о результирующей ДН АРК. Результирующая ДН АРК является алгебраической суммой ДН РА, имеющей вид восьмерки, и ДН ННА, имеющей вид окружности, и представляет собой кардиоиду.
Периодическое инвертирование фазы сигнала на выходе балансного модулятора с частотой Fгнч эквивалентно перебрасыванию кардиоиды с такой же частотой с одной стороны на противоположную. Благодаря этому в АРК реализуется пеленгование методом минимума глубины амплитудной модуляции.
Анализируя сигнал на выходе КС, можно сделать следующие выводы:
- информация о стороне отклонения направления на пеленгуемую ПРС от направления нулевого пеленга заключается в фазе высокочастотного сигнала РА. В результате сложения сигналов ННА и РА происходит перенос этой информации в фазу результирующего сигнала;
- глубина модуляции суммарного сигнала несет информацию о величине отклонения направления на пеленгуемую ПРС от направления нулевого пеленга.
Таким образом, балансный модулятор и контур сложения обеспечивают трансформацию информации о КУР из фазы высокочастотного сигнала в фазу огибающей, частота которой определяется ГНЧ. Кроме этого, БМ обеспечивает коммутацию суммарной ДН АРК.
Выходной сигнал КС усиливается в приемоусилительном тракте (ПУТ), преобразуется и детектируется амплитудным детектором (АД). Напряжение на выходе детектора (uУПР - сигнал ошибки) содержит в себе информацию о КУР. Амплитуда этого напряжения пропорциональна углу отклонения направления нулевого приема рамочной антенны от положения, соответствующего направлению на ПРС. Фазовые соотношения между напряжением на выходе детектора и напряжением ГНЧ, являющимся опорным напряжением, характеризуют сторону отклонения рамочной антенны от этого положения.
В общем случае сигнал на выходе детектора несет информацию и о позывных ПРС. С выхода детектора низкочастотный сигнал поступает на усилители телефонного и компасного каналов. Усилитель телефонного канала (УТК) усиливает сигнал, соответствующий коду позывных ПРС, и выдает его на головные телефоны экипажа. Усилитель компасного канала (УКК) осуществляет фильтрацию и усиление сигнала ошибки с частотой Fгнч, суммирование его с напряжением отрицательной обратной связи, снимаемым с тахогенератора (ТГ).
Сигнал с выхода УКК с частотой Fгнч поступает на управляющую обмотку двигателя привода искательной катушки гониометра. На обмотку возбуждения двигателя подается напряжение непосредственно с генератора низкой частоты. Двигатель поворачивает искательную катушку до тех пор, пока напряжение на её выходе uРА не станет равным нулю. При этом одновременно информация о КУР передается на индикатор КУР.
Обратная тахометрическая связь вводится для обеспечения плавного перехода искательной катушки гониометра к положению пеленга радиостанции. С выходной обмотки тахогенератора снимается напряжение, пропорциональное скорости отработки исполнительного двигателя. В противофазе с основным сигналом оно подается на УКК.
В радиокомпасе АРК-22 реализован несколько иной принцип переноса информации о направлении на пеленгуемую ПРС в параметр сигнала, подлежащего обработке.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
