
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ПОСТРОЕНИЕ ЗОН РИСКА НА ОСНОВЕ НЕЧЕТКОЙ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ ВОЗДЕЙСТВИЕ – ВОСПРИИМЧИВОСТЬ
,
Ростовская академия сервиса Южно-Российского государственного университета
экономики и сервиса, Ростов-на-Дону
Введение. В соответствии с Федеральным законодательством об опасных производственных объектах, каждый потенциально опасный объект (ПОО) должен иметь паспорт безопасности, в котором оцениваются качественные и количественные показатели риска системы, а также безопасность системы при различных условиях.
В области моделирования и оценки безопасности объектов и производств в мире применяется вероятностный подход. На нем основаны как ряд информационных технологий, так и логико-вероятностный метод установления вероятности происшествий, который берет начало в трудах отечественных ученых, таких как Д. Поспелов, Н. Стрелецкий, И. Рябинин, В. Острейковский. Однако основной проблемой, препятствующей полноценному применению данного метода к анализу сложных и уникальных систем, называет проблему подбора исходных данных в форме вероятностей инициирующих событий. Часто это связано с невозможностью получать полную и достоверную исходную информацию (особенно для тяжелых аварийных и катастрофических ситуаций) и необходимостью принимать решения.
Слово визуальный (от лат. visualis) означает зрительный, производимый невооружённым глазом или с помощью оптических приборов. Визуальное восприятие является одним из самых важных восприятий человека. Все сущее визуально. Если представить алгоритм вычислений показателей происшествия, то полученные данные для людей, не имеющих специальной подготовки, будут просто не понятны. Это осложнит понимание ими полученной информации или просто сделает её не доступной для них, не будет иметь смысла. Но если же представить эту информацию в визуальном виде, она станет понятной для восприятия, приобретет удобный информационный характер.
Аварийные ситуации можно анализировать заблаговременно, для того чтобы её избежать. Один из таких методов был представлен в программном продукте «Возмер»[1,8,9]. Программа спроектирована как составная часть программного комплекса моделирования и оценки риска MART 1.1 (Modeling and Analysis of Risk in Techical systems) и предназначена для расчёта возможностной меры возникновения как предпосылок, так и самого происшествия в сложных системах по данным экспертизы и текущего мониторинга. Любая экстремальная ситуация может быть представлена «визуально». При этом любую предпосылку к происшествию можно представить в 3D (трехмерном измерении). Этот способ вычисления возникновения чрезвычайной ситуации наиболее удобен для восприятия и понимания.
Применение возможностной меры. В последнее время для анализа и оценки свойств сложных систем применяется теория нечетких множеств, введенная Лотфи Заде в 60-х гг. XX в. На ее основе разработана методология и модели теории возможностей (Д. Поспелов, П. Прад, Д. Дюбуа, И. Пытьев, В. Золотухин). В рамках теории возможностей информация рассматривается не как случайная, а как нечеткая категория. Если исходные данные о системе имеют нечеткий или неполный характер, что часто бывает на практике, то мера возникновения происшествия может быть получена в виде нечеткой возможностной меры[1]. В ряде работ показано [2–4], что применение других методологий может привести или к недооценке угроз, или к неоправданным затратам на обеспечение безопасности.
В физическом аспекте определение возможностной меры приводит к разбиению объекта на элементы и к учету действия всех возможных видов факторов на возможных областях изменения их параметров.
Если формально переход элемента в состояние отказа выразить в виде логических условий превышения, а функцию опасности – в виде предиката: «в системе существует хотя бы одна пара вида (источник – приемник одинаковых факторов)», то «нечеткую модель» уникальной технической системы и нечеткую информацию о ней можно представить с помощью погрешностей параметров воздействий и восприимчивости элементов объекта. На основе указанных погрешностей из физико-технического анализа конкретной системы устанавливаются функции принадлежности нечетких величин, знание о которых позволяет находить меру возникновения происшествия. Это принципиальное преимущество «возможностного» анализа системы.
Построение факторного параметрического базиса системы и представление её в визуальном виде. В ряде случаев для описания и характеристики техногенных систем достаточно использовать такие производные параметры, как энергия, мощность и плотность мощности физического фактора [1]. Пронумеруем их переменной m = 1, 2, 3 и выразим логическую переменную o m t как элемент нового множества ОМ производных параметров физических факторов через логическое выражение размерности f(ont), в котором участвуют логические переменные множества ON: o m t = f ( o n t ) . Также введём в базис дополнительные переменные параметры для визуального представления: r – радиус поражения, h – высота, t – время.
Введенные множества и операции над ними представляют собой выраженный в универсальной форме факторный параметрический базис системы “ потенциально опасный объект – средства и мероприятия защиты – опасные и вредные факторы” [5,6]:
ФПБ = áV, F, M, T, L, K, S, P, h, tñ . (1)
Представим базис (1) в виде трехмерной модели - гиперкуба.
Описание гиперкуба. При формировании выявления предпосылок опасности пронумеруем потенциально опасные элементы объекта по нарастанию возможного ущерба в случае их активного отказа [4,5]. Для этого рассмотрим множество
S = F ´ V® fmtlk ´ vmtl = smtlk, (2)
как полный гиперкуб, имеющий размерность mM ´ tT ´ lL ´ kK. Причем, переменные k и l соответственно описывают номера приемников и источников. Причем принимается, что на элемент k воздействует элемент l.
Представим модель в трехмерном измерении, В совокупности можно получить следующее визуальное представление о возникновении предпосылки происшествия, радиусе поражения, высоте поражения (см. рисунок).
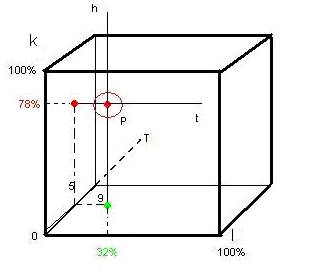
Геометрическая интерпретация факторного базиса в виде гиперкуба
Полученная модель возникновения предпосылок к происшествию отражает последствия воздействия к возникновению происшествия.
Параметр T представляет виды девяти материальных (физических) факторов воздействия [1]. Т. е. как источник, так и приемник могут содержать в себе все девять видов факторов воздействия на объект.
С помощью 3D - модели мы наблюдаем полную картину и видно, по каким факторам произошло инициирование предпосылки к происшествию, какое воздействие и какая защита у объекта, также можно увидеть возникновение предпосылок происшествий. При этом в точке возникновения предпосылки к происшествию можно рассчитать радиус поражения r, высоту h и время t.
Пространственная параметрическая модель расчета возможностной меры происшествия. Для количественного описания на основании [4,5] нами разработана следующая нечеткая пространственная параметрическая модель происшествия в системе вида «потенциально опасный объект – защита – факторы»
π = 1 – (d – ρk – ρl)/(Δk + Δl), (3)
где d – расстояние между приемником и источником воздействия; ρk и ρl – соответственно ядра нечетких полярных координат (радиусов поражения), через которые выражаем восприимчивость приемника k и воздействие источника l; Δk и Δl - погрешности представления параметров восприимчивости и воздействия (интервал различимости носителя нечеткого параметра по уровню различимости α), определяемые следующим образом:
Δk = ρkα – ρk; Δl = ρlα – ρl. (4)
Выражение (3) есть результат преобразования «физической модели» поражения [4,5] в «координатную», где нечеткие параметры восприимчивости и воздействия в пространственном факторном параметрическом базисе выражены через ядра и различимые радиусы зон восприимчивости и воздействия.
Причем прямое и обратное преобразования из параметрической формы в пространственную соответственно можно выполнить на основании зависимостей
r = fr (ρ), s = fs (ρ); (5)
ρ = φr (r), ρ = φs (s). (6)
Такие преобразования легко произвести по каждому виду воздействующего фактора (механическому, тепловому, химическому и др.).
Все предпосылки к происшествию на плане местности системы в виде области пересечения областей воздействия и восприимчивости можно выделить разными цветами:
А) зеленый – предпосылки к происшествию нет, пересечения множеств ρkα и ρlα нет: π = 0;
Б) желтый – имеются предпосылки к происшествию, они геометрически интерпретируются пересечением множеств ρkα и ρlα , возможностная мера реализации которого оценивается в интервале от 0 до 50 (%), π ≤ 0,5;
В) красный – геометрическая интерпретация в виде пересечения множеств ρkα и ρlα возможности возникновения предпосылки к происшествию оценивается в пределах π ≥ 0,5.
Пример. Рассмотрим систему, содержащую один источник и один приемник воздействия. Пусть пространственные параметры связаны между собой следующими отношениями: Δl = 4 Δk = 0,4d ; ρl = 0,5d ; ρk = 0,2d . Требуется определить возможностную меру возникновения происшествия с одновременной визуализацией на плане системы. Подставив исходные данные задачи в зависимость (3), получим
π = 1 – (d – 0,2 d – 0.5 d)/(0,5 d) = 0,4.
При этом опасность системы индицируется желтым цветом.
Работа выполнена при финансовой поддержке РФФИ, грант 06-08-01259.
Список литературы
1. , , Самсонов и оценка риска систем «защита – объект – среда». М.: УРСС, 2008. 138 с.
2. Махутов и применение методов управления риском в задачах обеспечения техногенной безопасности и технического регулирования // Проблемы безопасности и чрезвычайных ситуаций. М.: ВИНИТИ, 2006. № 1. С. 35–50.
3. Золотухин числовые характеристики возможности, возможностного распределения и меры // Автоматика и Телемеханика, 2002. №3. с. 152-159.
4. Есипов возможностной (нечеткой) оценки риска сложных технических систем // Безопасность России. Анализ риска и проблем безопасности. В 4 ч. Ч.1. М. 2006. С.278–291.
5. Есипов возможностной оценки риска техногенных систем // Автоматика и Телемеханика. 2003. № 7. С. 5–12.
6. Рябинин и безопасность структурно-сложных систем. СПб.: Политехника, 2000. 248 с.
7. Можаев структурно-логическое моделирование в решении задач вероятностного анализа безопасности // ТИТ МБСС. Вып. 4, СПб, 1994. С. 16 – 38.
8. , , Черемисин параметрическая модель и методика возможностной оценки качества и прибыльности сервиса и услуг// Тр. междунар. науч. школы "Моделирование и Анализ Безопасности и Риска в Сложных Системах (МА БР - 2005), 28 июня - 1 июля, 2005". СПб. 2005. С.122.
9. , , Черемисин автоматизированной системы оценки, мониторинга и управления риском и качеством техногенных и экологических систем// Там же. С.348.
[1] Функция ![]() : 1) П ( Æ ) = 0; П ( X ) = 1; 2)
: 1) П ( Æ ) = 0; П ( X ) = 1; 2)  .
.
