

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Оптимальный двукаскадный алгоритм обработки навигационной информации
Введение
При решении задач выработки навигационных параметров в реальном времени в настоящее время широкое распространение получили различные стохастические методы обработки информации. В частности, если пренебречь ошибками, связанными с линеаризацией навигационных измерений оптимальная оценка навигационных параметров с минимальной ковариационной матрицей ошибки оценки может быть обеспечена с использованием одного централизованного фильтра Калмана [ ], вектор состояния которого включает вектор состояния динамической системы и векторы состояния формирующих фильтров, используемых для описания медленно-меняющихся (небелошумных) составляющих ошибок измерений.
С другой стороны современный уровень развития вычислительной техники
и включение вычислительных средств в состав измерительных модулей позволяет поставить задачу выработки навигационных параметров с использованием каскадной архитектуры их выработки, когда на первом этапе реализуется предварительная обработка навигационной информации в составе отдельных модулей.
Классическим примером использования каскадной архитектуры являются методы федеративной фильтрации, суть которых заключается в выработке частных оценок состояния динамической системы в банке частных фильтров по информации, полученной в одном измерительном модуле с выработкой комплексной оценки состояния путем последующего взвешивания частных оценок в блоке безынерционного осреднения.
В рамках данной работы рассматривается двухкаскадная схема выработки навигационных параметров с использованием ИНС полуаналитического типа на базе магнитных гироскопов с принудительным вращением платформы.
Особенностью такой схемы выработки навигационных параметров является демпфирование на первом этапе суточных и шулеровских колебаний по измерениям от относительного лага с использованием стационарных фильтров, а на втором этапе использование тех же самых измерений для коррекции выработанных неоптимальным образом навигационных параметров. Показывается, что такая двухкаскадная схема обработки может обеспечить оптимальную выработку навигационных параметров.
1. Особенности использования стационарных фильтров в ИНС полуаналитического типа.
Предметом рассмотрения в рамках данной работы является ИНС полуаналитического типа на магнитных гироскопах с принудительным вращением платформы с постоянной скоростью, блок схема основного контура которой представлена на рис.1
На рисунке обозначены:
А – угол разворота стабилизированной платформы (СП) от направления на север (азимут платформы);
WX, WY, WZ – составляющие линейного ускорения, измеренные соответствующими акселерометрами;
dаx, dаy, dаz – смещение нуля акселерометров;
U – угловая скорость вращения Земли;
RX, RY, R0 – радиусы кривизны земного эллипсоида в ортодромических осях (осях СП);
R1, R2 – радиусы кривизны земного эллипсоида в географических осях;
WX, WY, WZ – скорость прецессии, задаваемые на соответствующие гироскопы;
eX, eY, eZ – скорости ухода гироскопов;
nU – скорость принудительного вращения;
q – угол поворота основания гироприбора относительно СП;
u1X, u1Y, uX, uY - точки ввода управлений.
В изделии для демпфирования шулеровских и суточных колебаний, используются два стационарных фильтра, включение которых осуществляется в соответствии со схемами, приведенными на рис. 2 и рис. 3.
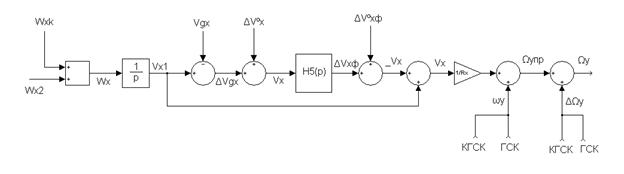
Рис. 2 Схема демпфирования вертикали
Где:
Wx2 – проекция ускорения, по данным акселерометра,
Wxk – проекция ускорения Кориолиса,
Wx– скорректированные ускорения,
Vx1, – линейная скорость после первого интегратора,
Vgx – проекции демпфирующих скоростей на оси гиростабилизированной платформы (ГСП).
Rx – радиус кривизны Земли,
DV0x, DV0xф - поправки на скачки, при переключении режимов работы изделия,
wy - угловая скорость для моделирования заданной системы координат,
ΔΩy - поправки к угловой скорости управления,
ККСК, ГСК - признак системы координат.
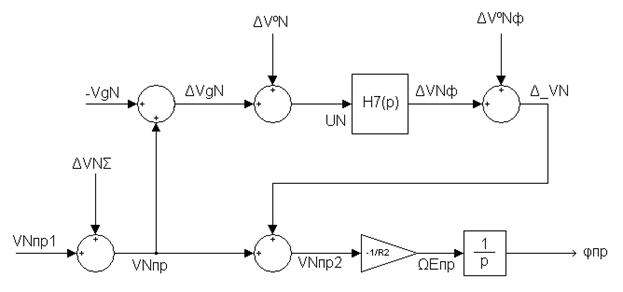
Рис.3 Схема демпфирования суточного контура
Где:
VgN – проекции демпфирующих скоростей на оси ГСП,
ΔVºN поправки на скачки, при переключении режимов работы изделия,
Vx – составляющие скорости для задачи УС,
ΔVºx. y ф – поправки на скачки при переключении режимов работы или коэффициентов демпфирования,
ΔVNΣ – поправки к северной составляющей приборной скорости,
VNпр1,2 – Северная составляющая скорости
φпр – координата места для вычисления угл. скоростей управления,
ΩEпр – проекция угловой скорости вращения приборной ГСК (КГСК) на оси ГСП.
Передаточные функции фильтров в контуре построения вертикали имеют следующий вид:
с параметрами фильтров ![]()
Можно показать, что в пространстве состояний такая передаточная функция обеспечиваются использованием формирующих фильтров вида


Передаточная функция фильтра в суточном контуре имеет вид
 .
.
с параметрами

Коррекцию с помощью такой передаточной функции можно преобразовать к виду
где
В пространстве состояний такая передаточная функция обеспечивается использованием формирующего фильтра вида
2. Математическая постановка задачи выработки навигационных параметров
Будем полагать, что поведение ошибок рассматриваемой ИНС полуаналитического типа и состояний формирующих фильтров в самом общем случае в дискретном времени может быть адекватно описано системой уравнений
![]() , (1)
, (1)
![]() , (2)
, (2)
где ![]() -вектор состояния размерности
-вектор состояния размерности ![]() ;
; ![]() -вектор измерений размерности
-вектор измерений размерности ![]() ;
; ![]() ,
,![]() -центрированные гауссовские векторы белошумных возмущений и ошибок измерений с ковариационными матрицами
-центрированные гауссовские векторы белошумных возмущений и ошибок измерений с ковариационными матрицами ![]() и
и![]() соответственно,
соответственно, ![]() -матрица измерений,
-матрица измерений, ![]() -гауссовский вектор начальных условий,
-гауссовский вектор начальных условий,  . Последовательности
. Последовательности ![]() и
и ![]() предполагаются гауссовскими и взаимно независимыми между собой и от вектора
предполагаются гауссовскими и взаимно независимыми между собой и от вектора ![]() , т. е.
, т. е.  ,
,  .
.
Известно[ ], что в такой постановке задачи оценивания оптимальная оценка вектора состояния ![]() может быть выработана с использованием оптимального централизованного ФК
может быть выработана с использованием оптимального централизованного ФК
 , (3)
, (3)

![]() , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
 , (7)
, (7)
с параметрами ![]() ,
, ![]() ,
, ![]() ,
,![]() Схема обработки информации с использованием оптимального централизованного фильтра представлена на рис.1.
Схема обработки информации с использованием оптимального централизованного фильтра представлена на рис.1.
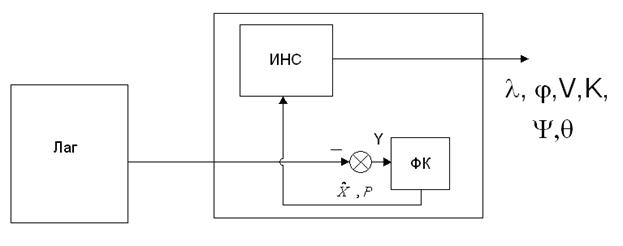
Отметим, что такая схема обработки информации является однокаскадной и обеспечивает одновременную выработку оптимальных оценок всех параметров, включенных в вектор состояния централизованного фильтра.
Можно показать, что применительно к рассматриваемой ИНС полуаналитического типа вектор состояния и измерений имеют вид соответственно размерности

- погрешности выработки вертикали ;
- погрешности выработки курса ;
- погрешности выработки скорости ;
- погрешности выработки координат (широты и долготы) ;
- постоянные случайные уходы гироскопов ;
- постоянные случайные углы отклонения осей чувствительности гироскопов от базовой ортогональной системы координат;
- смещения нулей акселерометров;
- переменные случайные уходы гироскопов ;
- постоянные случайные поправки масштабных коэффициентов управления гироскопами ;
- переменные случайные поправки масштабных коэффициентов управления гироскопами ;
- погрешности внешнего измерителя относительной скорости;
переменные, описывающие демпфирование ИНС.
Наряду с такой однокаскадной схемой обработки рассмотрим двухкаскадную схему, представленную на рис 2 ,
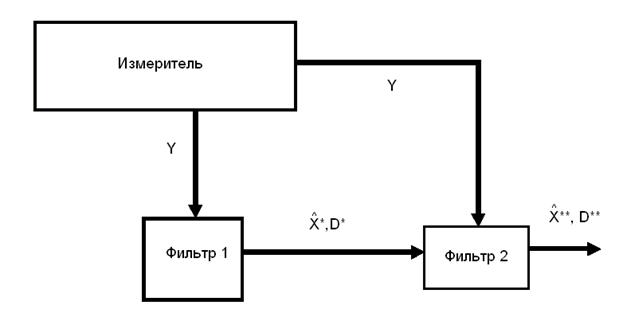
полагая, что на первом этапе измерения обрабатываются с использованием линейного фильтра
 (8)
(8)
с коэфФициентом усиления фильтра не совпадающим с оптимальным коэффициентом
Отметим, что в рассматриваемом случае ![]()
Известно, что в этом случае действительная ковариационная матрица ошибки оценки ![]() будет определяться выражением вида [ ]
будет определяться выражением вида [ ]
 . (9)
. (9)
Покажем теперь, что, если провести дополнительную обработку тех же измерений ![]() на втором этапе с использованием линейного фильтра вида
на втором этапе с использованием линейного фильтра вида
 , (10)
, (10)
то в результате такой обработки может быть выработана оптимальная оценка вектора состояния ![]() . Фактически это означает выбор коэффициента усиления фильтра
. Фактически это означает выбор коэффициента усиления фильтра ![]() таким образом, чтобы действительная ковариационная матрица ошибки оценки
таким образом, чтобы действительная ковариационная матрица ошибки оценки ![]() после дополнительной обработки измерений на втором этапе совпадала с ковариационной матрицей ошибки оптимальной оценки
после дополнительной обработки измерений на втором этапе совпадала с ковариационной матрицей ошибки оптимальной оценки ![]() .
.
С учетом (1), (8) и (10), для оценки ![]() и ошибки этой оценки
и ошибки этой оценки ![]() могут быть получены следующие выражения:
могут быть получены следующие выражения:
 , (11)
, (11)
 (12)
(12)
где  -ошибка априорной для
-ошибка априорной для ![]() -го шага обработки измерений оценки вектора состояния
-го шага обработки измерений оценки вектора состояния ![]() .
.
Вводя для удобства дальнейших преобразований обозначения:
![]()
![]() ,
, ![]()
 , (13)
, (13)
где ![]() и
и ![]() -единичные матрицы, размерности
-единичные матрицы, размерности ![]() и
и ![]() соответственно,
соответственно,
выражение (12) для ошибки оценки ![]() после преобразований может быть представлено в виде:
после преобразований может быть представлено в виде:
 , (14)
, (14)
и, как следствие, действительная ковариационная матрица ![]() ошибки оценки
ошибки оценки ![]() будет определяться выражением:
будет определяться выражением:
 . (15)
. (15)
Чтобы найти значение ![]() , обеспечивающее минимальное значение этой матрицы, преобразуем выражение (15), выделяя полный квадрат, к виду:
, обеспечивающее минимальное значение этой матрицы, преобразуем выражение (15), выделяя полный квадрат, к виду:
 , (16)
, (16)
где коэффициент усиления фильтра ![]() удовлетворяет уравнению:
удовлетворяет уравнению:
 (17)
(17)
Из этого уравнения может быть получено следующее выражение для коэффициента усиления фильтра ![]() :
:
 , (18)
, (18)
обеспечивающего минимальное значение действительной ковариационной матрицы ошибки оценки ![]() , равное:
, равное:
 (19)
(19)
С учетом того, что первые два слагаемых в этом выражении определяют действительную ковариационную матрицу ![]() ошибки субоптимальной оценки
ошибки субоптимальной оценки ![]() , анализ этого выражения показывает, что оценка
, анализ этого выражения показывает, что оценка ![]() может быть уточнена в результате повторной обработки измерений при использовании линейного фильтра с коэффициентом усиления фильтра
может быть уточнена в результате повторной обработки измерений при использовании линейного фильтра с коэффициентом усиления фильтра ![]() , определяемого выражением (18).
, определяемого выражением (18).
Проведем преобразование этого выражения, рассматривая вначале слагаемые  .
.
С учетом введенных обозначений эти слагаемые могут быть преобразованы к виду:
 (20)
(20)
Рассматривая теперь слагаемые ![]()
![]() , входящие в выражение (15), эти слагаемые, в свою очередь, можно преобразовать к виду:
, входящие в выражение (15), эти слагаемые, в свою очередь, можно преобразовать к виду:
 (21)
(21)
и, как следствие, может быть получено следующее выражение для коэффициента усиления ![]() :
:
 (22)
(22)
Из этого выражения следует, что, если на первом этапе обработка измерений проведена с оптимальным коэффициентом усиления фильтра, равным

то в этом случае коэффициент усиления фильтра ![]() равен нулю, что фактически означает отсутствие необходимости проведения коррекции оценки
равен нулю, что фактически означает отсутствие необходимости проведения коррекции оценки ![]() .
.
Покажем теперь, что повторная обработка измерений с коэффициентом усиления фильтра ![]() , определяемым выражением (22), позволяет получить оптимальную оценку вектора состояния
, определяемым выражением (22), позволяет получить оптимальную оценку вектора состояния ![]() . Проведя преобразование выражения (19) для действительной ковариационной матрицы ошибки оценки
. Проведя преобразование выражения (19) для действительной ковариационной матрицы ошибки оценки ![]() , с учетом найденного выражения для
, с учетом найденного выражения для ![]() и выражения (17)
и выражения (17)
может быть получено выражение для ![]() , совпадающее с (6), что и подтверждает возможность получения оптимальной оценки вектора состояния
, совпадающее с (6), что и подтверждает возможность получения оптимальной оценки вектора состояния ![]() в результате повторной обработки измерений
в результате повторной обработки измерений ![]() .
.
Таким образом, показано, что в результате реализации двукаскадной схемы обработки информации может быть получено оптимальное решение задачи оценивания и как результат обеспечена оптимальная выработка навигационных параметров
4. Результаты моделирования
Для оценки эффективности применения алгоритмов оптимальной фильтрации изделия и двухкаскадного алгоритма обработки было проведено моделирование погрешностей при использовании стационарных фильтров. Для сравнения, так же проведено моделирование погрешностей недемпфированной системы, то есть при отключении обоих стационарных фильтров.
Моделирование проводилось при следующих начальных значениях погрешностей (Х(0)):
Погрешность построения вертикали a, b=1’;
Погрешность приборной скорости Ve, Vn= 0м/с;
Погрешность определения координат j, l=0;
Погрешность приборного курса DK= 5 угл. мин;
Постоянная составляющая уходов гироскопов: ex, y,x=0,003град/час;
Переменная составляющая уходов гироскопов: ex,y,x=0,001град/час;
Постоянная составляющая масштабных коэффициентов гироскопов Dx,y=5*10-6 , Dz=0;
Переменная составляющая масштабных коэффициентов гироскопов Dx,y,z =0;
Погрешности перекрестных связей d=1*10-4
Смещение нулей акселерометров: da=1*10-5 м/с2.
Скорость неучтенного течения VTE,TN,=0,15 м/с
Результаты моделирования, при коэффициентах в передаточных функциях стационарных фильтров, соответствующих нормальному демпфированию приведены на рис.4-14.
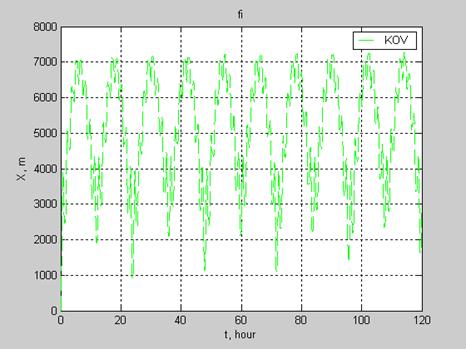
Рис.4 СКО (s) погрешности выработки широты недемпфированной системы (ковариационный канал).
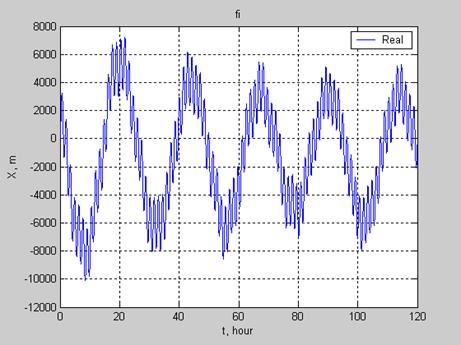
Рис.5 Погрешности выработки широты недемпфированной системы (оценочный канал).
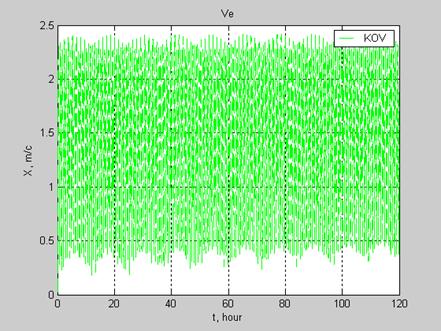
Рис.6 СКО (s) погрешности выработки восточной составляющей скорости недемпфированной системы (ковариационный канал).
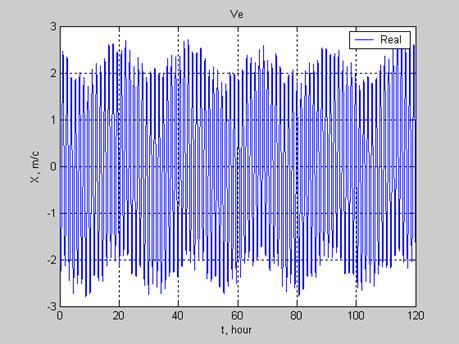
Рис.7 Погрешности выработки восточной составляющей скорости недемпфированной системы (оценочный канал).
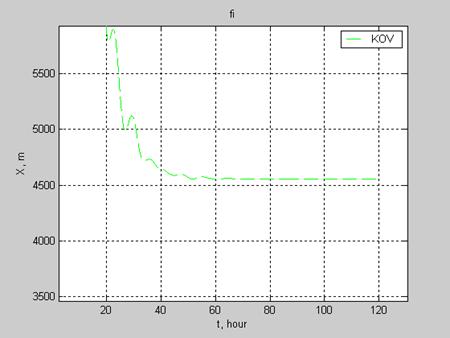
Рис.8 СКО (s) погрешности выработки широты демпфированной по данным относительного лага системы (стационарная фильтрация) (ковариационный канал).
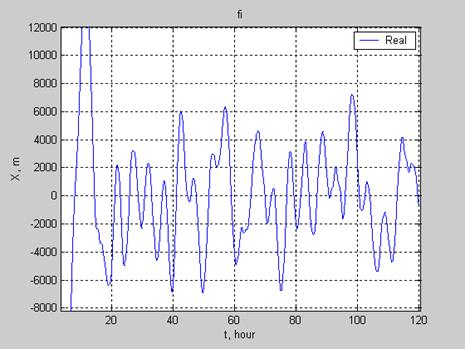
Рис.9 Погрешность выработки широты демпфированной по данным относительного лага системы (стационарная фильтрация) (оценочный канал).
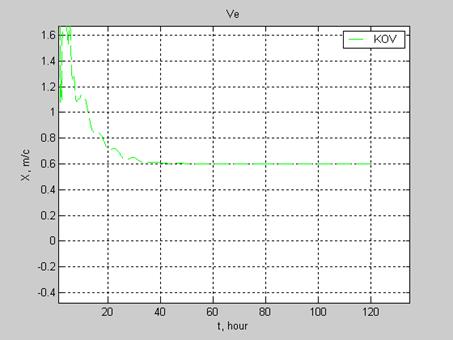
Рис.10 СКО (s) погрешности выработки восточной составляющей скорости демпфированной по данным относительного лага системы (стационарная фильтрация) (ковариационный канал).
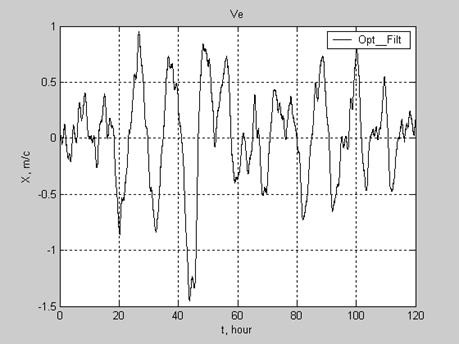
Рис.11 Погрешность выработки восточной составляющей скорости демпфированной по данным относительного лага системы (стационарная фильтрация), (оценочный канал).
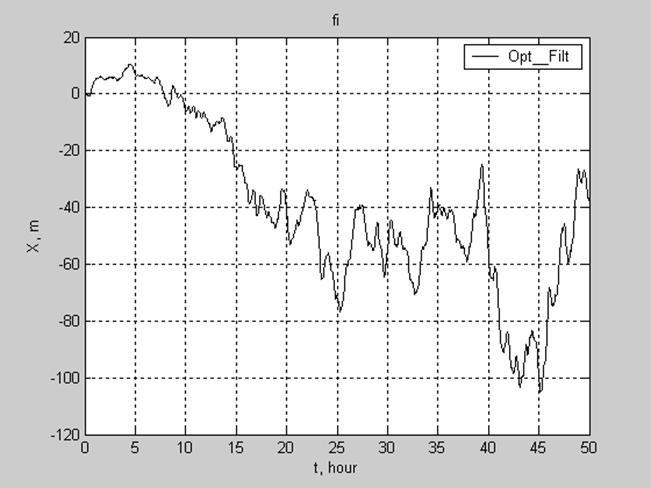
Рис.12 График зависимости широты от времени оптимальный фильтр (оценочный канал)
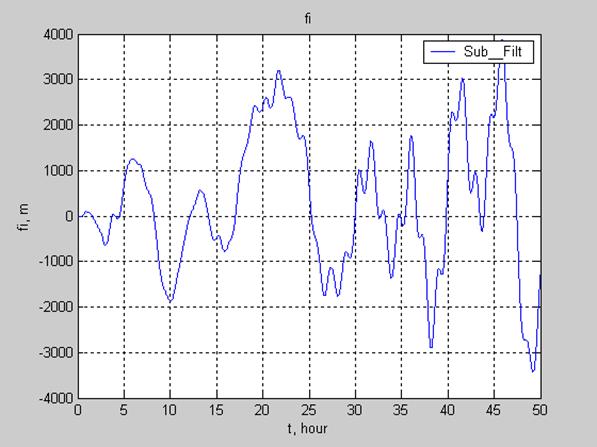
Рис.13 График зависимости широты от времени - двукаскадный алгоритм (оценочный канал) до коррекции
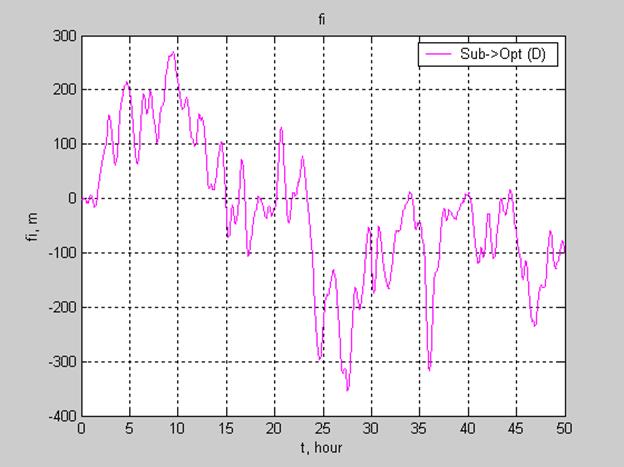
Рис.14 График зависимости широты от времени - двукаскадный алгоритм (оценочный канал) после коррекции
Заключение
В работе проведена проверка двухкаскадного алгоритма и его сравнение с оптимальным алгоритмом на примере ИНС полуаналитического типа при обработке информации от относительного лага. Показано, что в результате реализации двухкаскадного алгоритма точность навигационных параметров выработанных на первом этапе с использованием стационарных фильтров может быть существенно повышена и при оптимальном выборе коэффициента усиления на втором этапе достичь точности оптимального централизованного фильтра.
