

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Принимая во внимание, что все последующие рассуждения и выкладки одинаковы по отношению к каждой из функций правдоподобия: ![]() , далее рассмотрим подробно только одну из этих функций, например
, далее рассмотрим подробно только одну из этих функций, например ![]() .
.
Функцию правдоподобия ![]() представим в виде произведения
представим в виде произведения
![]() (21)
(21)
где ![]() - функция правдоподобия гипотезы H(m) по наблюдениям
- функция правдоподобия гипотезы H(m) по наблюдениям ![]() ;
; ![]() - функция правдоподобия гипотезы H(m) по наблюдениям
- функция правдоподобия гипотезы H(m) по наблюдениям ![]() , вычисляемая при условии, что в распоряжении РЛС имеются наблюдения
, вычисляемая при условии, что в распоряжении РЛС имеются наблюдения ![]() .
.
Функцию правдоподобия ![]()
![]() можно представить в виде произведения
можно представить в виде произведения![]()
![]() (22)
(22)
где ![]() - истинное значение координаты
- истинное значение координаты ![]() ВО при условии, что справедлива гипотеза H(m) ;
ВО при условии, что справедлива гипотеза H(m) ;![]() - п. р. в. ошибок измерения координаты
- п. р. в. ошибок измерения координаты ![]() на
на ![]() -ом такте. Возможность представления (22) следует из этого факта, что ошибки измерений координат, выполняемых в различных моментах времени, взаимно статически независимы (см. (1)). Учитывая, что ошибки первичных измерений – гауссовские (см. соотношение (1)), получаем
-ом такте. Возможность представления (22) следует из этого факта, что ошибки измерений координат, выполняемых в различных моментах времени, взаимно статически независимы (см. (1)). Учитывая, что ошибки первичных измерений – гауссовские (см. соотношение (1)), получаем
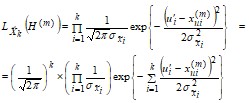 (23)
(23)
Функцию правдоподобия ![]() можно представить следующим образом:
можно представить следующим образом:
![]()
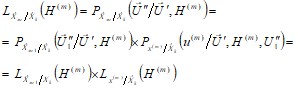 (24)
(24)
где ![]() - вектор размера
- вектор размера ![]() , отличающийся от вектора
, отличающийся от вектора ![]() отсутствием элемента x(m);
отсутствием элемента x(m);
![]() - вектор размера
- вектор размера ![]() независимых переменных, отличающийся от вектора
независимых переменных, отличающийся от вектора ![]() отсутствием элемента u(m).
отсутствием элемента u(m).
Нетрудно видеть, что содержащийся в (24) сомножитель
![]() (25)
(25)
где ![]() - п. р. в. ошибок измерения координаты
- п. р. в. ошибок измерения координаты ![]() объекта
объекта ![]() ;
; ![]() - среднеквадратическая ошибка измерения координаты
- среднеквадратическая ошибка измерения координаты ![]() для
для ![]() . В свою очередь сомножитель
. В свою очередь сомножитель ![]() имеет вид условной п. р. в.
имеет вид условной п. р. в.
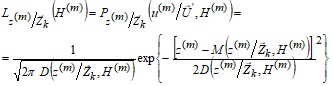
 (26)
(26)
- условная гауссовская п. р. в. Параметры этого распределения:
![]() - условное (апостериорное) математическое ожидание координаты
- условное (апостериорное) математическое ожидание координаты ![]() объекта ЗО(m), вычисляемое по наблюдениям
объекта ЗО(m), вычисляемое по наблюдениям ![]() в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты
в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты ![]() объекта ЗО(m)
объекта ЗО(m)
![]() - апостериорная дисперсия экстраполяционной оценки
- апостериорная дисперсия экстраполяционной оценки ![]() . Таким образом, функция правдоподобия (21) наблюдений
. Таким образом, функция правдоподобия (21) наблюдений ![]() относительно гипотезы
относительно гипотезы ![]() может быть представлена произведением трех сомножителей
может быть представлена произведением трех сомножителей
![]() , (27)
, (27)
определяемых соответственно соотношениями (23), (25), (26). Действуя аналогично изложенному выше, можно получить также функции правдоподобия ![]() и
и ![]() , входящие в виде сомножителей в соотношения (18) и (19). А именно, применительно к координате y:
, входящие в виде сомножителей в соотношения (18) и (19). А именно, применительно к координате y:
![]() , (28)
, (28)
где
 ; (29)
; (29)
![]() ; (30)
; (30) ![]() ;
;
 ; (31)
; (31)
![]() - среднеквадратическая ошибка первичного измерения координаты y в момент
- среднеквадратическая ошибка первичного измерения координаты y в момент ![]() ;
;
![]() - апостериорное математическое ожидание координаты y защищаемого объекта ЗО(m), вычисляемое по наблюдениям
- апостериорное математическое ожидание координаты y защищаемого объекта ЗО(m), вычисляемое по наблюдениям ![]() в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты y объекта ЗО(m);
в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты y объекта ЗО(m);
![]() - апостериорная дисперсия экстраполяционной оценки
- апостериорная дисперсия экстраполяционной оценки ![]() .
.
Аналогично применительно к координате z:
![]() , (32)
, (32)
где
 ; (33)
; (33)
![]() ; (34)
; (34)
![]() ;
;
 ; (35)
; (35)
![]() - среднеквадратическая ошибка первичного измерения координаты
- среднеквадратическая ошибка первичного измерения координаты ![]() в момент
в момент ![]() ;
;
![]() - апостериорное математическое ожидание координаты z защищаемого объекта ЗО(m), вычисляемое по наблюдениям
- апостериорное математическое ожидание координаты z защищаемого объекта ЗО(m), вычисляемое по наблюдениям ![]() в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты z объекта ЗО(m) по наблюдениям
в предположении, что объектом угрозы является ЗО(m) - оптимальная среднеквадратическая экстраполяционная оценка координаты z объекта ЗО(m) по наблюдениям ![]() ;
;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
