
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Гармоническая линеаризация принципиально отличается от обычной линеаризации, так как коэффициенты гармонически линеаризованного элемента непостоянны и зависят от амплитуды входного сигнала. Эквивалентная прямолинейная характеристика (рис. 8.5, а – тонкая линия) имеет различный наклон при разных амплитудах входного сигнала.
Применение современных программных моделирующих систем позволяет исследовать любые нелинейные системы значительно точнее и быстрее, чем рассмотренными методами.
8.5. Исследование абсолютной устойчивости нелинейных систем с помощью критерия Попова |
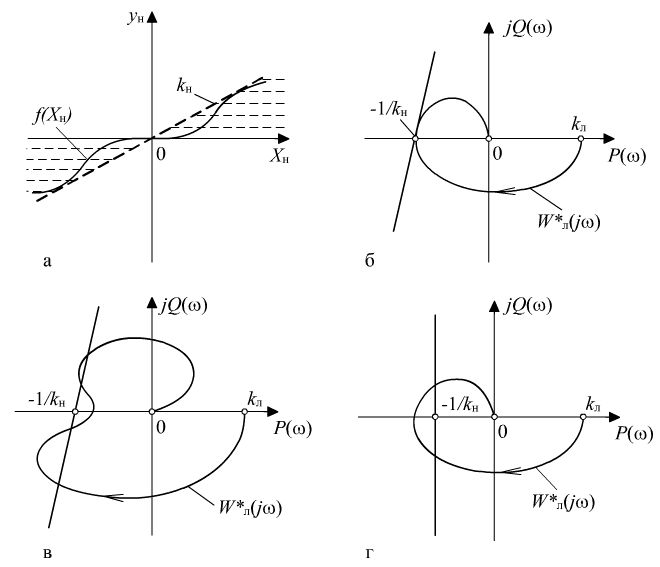
Абсолютной устойчивостью называется устойчивость системы при любых начальных отклонениях для любой формы нелинейной характеристики, принадлежащей к одному из определенных классов. Нелинейности считаются одного класса, если их характеристики ![]() находятся в секторе
находятся в секторе ![]() между осью абсцисс и прямой с угловым коэффициентом
между осью абсцисс и прямой с угловым коэффициентом ![]() (рис. 8.6, а). Критерий Попова относится к частотным методам определения абсолютной устойчивости нелинейных систем.
(рис. 8.6, а). Критерий Попова относится к частотным методам определения абсолютной устойчивости нелинейных систем.
Задача об исследовании абсолютной устойчивости возникает в связи с тем, что в некоторых случаях нелинейная характеристика звена является нестабильной и может быть охарактеризована только определенной областью.
Пусть известна частотная функция линейной части системы ![]() и задано значение параметра
и задано значение параметра ![]() , который является некоторым предельным параметром нелинейной характеристики
, который является некоторым предельным параметром нелинейной характеристики ![]() , произвольно располагающейся в заданной области.
, произвольно располагающейся в заданной области.
Необходимо определить, обеспечивается ли абсолютная устойчивость конкретной системы для любой характеристики ![]() , удовлетворяющей условиям:
, удовлетворяющей условиям:
| (8.15) |
 ,
,В формулировке критерия используется понятие модифицированной а. ф.х.
Пусть линейная часть системы устойчива и имеет а. ф.х.
| (8.16) |
Образуем из этой обычной а. ф.х. следующую видоизмененную а. ф.х., у которой мнимая часть получена умножением ![]() на
на ![]() :
:
| (8.17) |
где ![]() – нормирующий множитель. Характеристика (8.17) и называется модифицированной.
– нормирующий множитель. Характеристика (8.17) и называется модифицированной.
Критерий абсолютной устойчивости равновесия нелинейной системы, удовлетворяющей вышеперечисленным требованиям, формулируется следующим образом:
для абсолютной устойчивости равновесия достаточно, чтобы модифицированная характеристика ![]() не охватывала точку
не охватывала точку ![]() и через эту точку можно было провести прямую, не пересекающую характеристику
и через эту точку можно было провести прямую, не пересекающую характеристику ![]() (последняя лежит справа от прямой).
(последняя лежит справа от прямой).
На рис. 8.6, б показан случай, когда критерий устойчивости выполняется, а на рис. 8.6, в, г – случаи, когда не выполняется.
По наклону прямой Попова, "прижатой" к кривой ![]() , можно судить о допустимом классе нелинейности: если прямая вертикальна, то нелинейность может быть только однозначной, а если она наклонена, то нелинейность может быть и однозначной и неоднозначной (с гистерезисом).
, можно судить о допустимом классе нелинейности: если прямая вертикальна, то нелинейность может быть только однозначной, а если она наклонена, то нелинейность может быть и однозначной и неоднозначной (с гистерезисом).
|
Пример.
Определить с помощью критерия Попова абсолютную устойчивость равновесия нелинейной системы, состоящей из трехпозиционного релейного элемента (рис. 8.7, а) с параметрами ![]() и линейной части:
и линейной части:
| (1) |
с параметрами ![]() .
.
Решение. Представим а. ф.х. (1) в виде
| (2) |
 .
.Соответствующая (2) модифицированная характеристика (рис. 8.7, б) описывается уравнением
| (3) |
 .
.
|
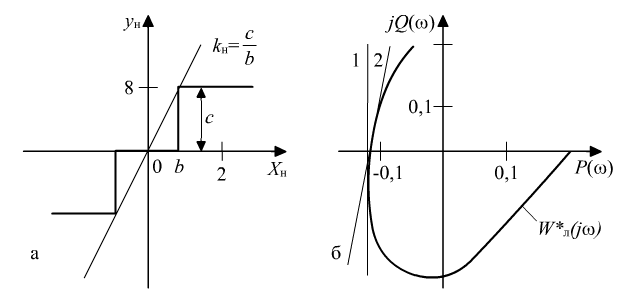
Через точку с абсциссой, равной ![]() , проведена прямая 1, которая не пересекается с кривой
, проведена прямая 1, которая не пересекается с кривой ![]() . Следовательно, при заданных параметрах равновесие системы абсолютно устойчиво.
. Следовательно, при заданных параметрах равновесие системы абсолютно устойчиво.
Для решения обратной задачи – определения допустимого по условию устойчивости равновесия значения зоны нечувствительности ![]() проведем прямую 2, "прижатую" к характеристике
проведем прямую 2, "прижатую" к характеристике ![]() . Она пересекает действительную ось в точке с абсциссой
. Она пересекает действительную ось в точке с абсциссой ![]() . Тогда допустимое значение для углового коэффициента
. Тогда допустимое значение для углового коэффициента ![]() , а для зоны нечувствительности
, а для зоны нечувствительности ![]() .
.
При ![]() состояние равновесия системы будет неустойчивым.
состояние равновесия системы будет неустойчивым.
В некоторых случаях использование нелинейных систем управления затруднено из-за наличия низкочастотных автоколебаний большой амплитуды. Устранить этот недостаток можно путем компенсации нелинейностей. При этом нелинейная система относительно некоторых входных сигналов может рассматриваться как линейная.
Простейшим способом устранения нелинейности является включение параллельно или последовательно с основной нелинейностью ![]() компенсирующей нелинейности
компенсирующей нелинейности ![]() , имеющей обратный характер. Тогда такое соединение нелинейных элементов образует эквивалентный линейный элемент и система станет линейной.
, имеющей обратный характер. Тогда такое соединение нелинейных элементов образует эквивалентный линейный элемент и система станет линейной.
Применяется также вибрационная компенсация нелинейностей. Такая компенсация является наиболее распространенным способом линеаризации релейных систем. Вибрационная компенсация осуществляется высокочастотным периодическим сигналом.
Классификация САР | Краткая характеристика САР | |
1 По назначению алгоритма изменения задающего воздействия (или по виду выполняемых функций) | Стабилизирующая | Поддерживает регулируемый параметр на постоянном значении заданной точки. X=SP=const |
Программная | Изменяет регулируемую величину в соответствии с функцией задания во времени – программные задатчики. SP=F[SPprog(t)] | |
Следящая | Задача состоит в том, чтобы изменения регулируемой вели чины следили за изменениями другого параметра. X=var | |
С управлением от ПЭВМ | Изменяет регулируемую величину в зависимости от заранее неизвестной величины заданной точки. Значение задания регулятору формируется по интерфейсу. X=var | |
2 По количеству контуров регулирования | Одноконтурные | Содержащие один контур регулирования |
Многоконтурные | Содержащие несколько контуров регулирования (в т. ч. каскадные регуляторы, регуляторы ограничения) | |
3 По количеству регулируемых технологических параметров | Однокомпонентные | Системы с одной регулируемой величиной |
Многокомпонентные несвязанные | Системы с несколькими регулируемыми величинами. Регуляторы непосредственно не связаны и могут взаимо действовать только через общий для них обьект регулирования | |
Многокомпонентные связанные | Системы с несколькими регулируемыми величинами. Регуляторы различных параметров одного или нескольких обьектов связаны между собой:
| |
4 По своему функциональному назначению | Специализированные | САР температуры, давления, расхода, уровня, обьема и др. |
Универсальные | С нормированными входными и выходными сигналами и пригодные для управления различными параметрами | |
5 По закону регулирования или логике работы контура регулирования | Двухпозиционный | См раздел Типы регуляторов и законы регулирования |
Трехпозиционный | ||
П, ПИ, ПИД-регулятор | ||
ШИМ-регулятор | ||
Адаптивные | Самонастраивающиеся, автонастраивающиеся | |
Оптимальные | Использующие оптимальный закон регулирования | |
6 По характеру используемых для управления сигналов (по роду действия) | Непрерывные | Аналоговые сигналы (ток, напряжение). Частный случай – выходной сигнал ШИМ регулятора (с дискретным выходом) |
Дискретные | Релейные, импульсные, цифровые. Выходные устройства – механическое реле, твердотельное реле, симистор, тиристор, транзисторный ключ, интерфейс | |
7 По характеру математических соотношений | Линейные | Для которых справедлив принцип суперпозиции (см. прим.1) |
Нелинейные | Для которых не справедлив принцип суперпозиции (см. прим.1) | |
8 По виду используемой для регулирования энергии | Электрические | В т. ч. электронные |
Пневматические | Мембранные, поршневые, лопастные | |
Гидравлические | ||
Механические | ||
Комбинированные | Электропневматические, пневмо-, электромеханические | |
9 По принципу регулирования | По рассогласованию | См. прим.2 |
По отклонению | См. прим.2 | |
По возмущению | См. прим.3 | |
Комбинированные | См. прим.4 | |
10 По направлению действия | Прямые | Регуляторы прямого (нормального) действия |
Обратные | Регуляторы обратного (реверсивного) действия | |
11 По принципу действия | Прямого действия | Не используют внешнюю энергию, а используют энергию самого обьекта управления (регуляторы давления) |
Непрямого действия | Для работы требуется внешний источник энергии |


|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
