


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() – постоянный коэффициент, принимающий значение 1 (при положении переключателя J) или 10 (при положении переключателя 10J).
– постоянный коэффициент, принимающий значение 1 (при положении переключателя J) или 10 (при положении переключателя 10J).
ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО содержит секундомер, вольтметр с автоматическим переключением полярности измеряемого сигнала и органы управления индикатором. Секундомер предназначен для измерения времени переходного процесса или других временных интервалов в диапазоне от 0.1 до 99.9 с дискретностью 0.1 с. Для измерения времени переходного процесса вход секундомера подключается к точке "
![]() ". При этом отсчет времени переходного процесса начинается с момента перевода моделирующего блока в состояние РАБОТА до момента, когда модуль сигнала рассогласования в точке "
". При этом отсчет времени переходного процесса начинается с момента перевода моделирующего блока в состояние РАБОТА до момента, когда модуль сигнала рассогласования в точке "
![]() " станет меньше значения 0.5 В. В случае, если в качестве критерия окончания времени переходного процесса используется другой сигнал, останов секундомера производится с помощью кнопки СТОП. Выбор режима работы секундомера производится с помощью тумблера "от
" станет меньше значения 0.5 В. В случае, если в качестве критерия окончания времени переходного процесса используется другой сигнал, останов секундомера производится с помощью кнопки СТОП. Выбор режима работы секундомера производится с помощью тумблера "от 

![]() /СТОП”. Вольтметр предназначен для измерения сигналов в контрольных точках моделирующего блока и калибровки потенциометров. Для калибровки потенциометра нажимается расположенная рядом с ним кнопка, при этом вольтметр показывает коэффициент передачи потенциометра. Сотому делению шкалы соответствует единичный коэффициент передачи потенциометра, нулевому - нулевой. Для измерения сигналов вольтметр подключается к контрольным точкам моделирующего блока с помощью переключателя, имеющего соответствующие обозначения. К этим же точкам подключается осциллограф и самописец. Осциллограф может работать в следующих режимах:
/СТОП”. Вольтметр предназначен для измерения сигналов в контрольных точках моделирующего блока и калибровки потенциометров. Для калибровки потенциометра нажимается расположенная рядом с ним кнопка, при этом вольтметр показывает коэффициент передачи потенциометра. Сотому делению шкалы соответствует единичный коэффициент передачи потенциометра, нулевому - нулевой. Для измерения сигналов вольтметр подключается к контрольным точкам моделирующего блока с помощью переключателя, имеющего соответствующие обозначения. К этим же точкам подключается осциллограф и самописец. Осциллограф может работать в следующих режимах:
– построение графика измеряемой величины по оси времени (диапазон периода развертки от 2 до 20 с, переключатель режимов развертки в положении РАЗВЕРТКА);
– наблюдение статической характеристики нелинейного элемента переключателя в положении Ul, U2);
– наблюдение фазовой траектории объекта управления (переключатель в положении Yl, Y2). Управление разверткой производится от встроенного генератора. Осциллограф должен использоваться в режиме усиления входных сигналов горизонтального (X) и вертикального (Y) отклонений луча.
УСИЛИТЕЛЬ МОЩНОСТИ служит для усиления сигналов, подаваемых на реальный объект управления, имеющий электрический вход. Усилитель мощности имеет схему защиты по току нагрузки и по сигналам концевых контактов, фиксирующих крайние положения рабочего органа объекта управления. Срабатывание защиты индицируется светодиодом "защита". Полярность управляющего воздействия индицируется светодиодами "+" и "-". Регулирующим элементом усилителя является пара встречно-параллельно включенных тиристоров. Управляются тиристоры от широтно-импульсного модулятора ШИМ, синхронизируемого переменным питающим напряжением. Таким образом, для двигателя постоянного тока объекта управления реализуется режим однополупериодного импульсного управления. Для защиты двигателя по току используется пороговый элемент, на вход которого подается сигнал с балластного резистора защиты R3. В случае если ток двигателя превосходит предельно-допустимое значение, на выходе порогового элемента выделяется импульс, который расширяется в одновибраторе (ОВ) и, поступая на входе запрета мультиплексора MX, вызывает отклонение входа ШИМ от источника сигнала. При этом загорается светодиод "ЗАЩИТА". Для ограничения перемещения объекта управления в усилитель вводятся сигналы концевых датчиков К1.1, К 1.2. Если объект управления занимает одно из крайних положений, сигнал соответствующего концевого датчика поступает на управляющий вход мультиплексора MX. В результате этого вход ШИМ подключается к источнику сигнала через нелинейный элемент, пропускающий только отрицательный или только положительный сигнал, т. е. сигнал того знака, при котором возможен выход манипулятора из крайнего положения. Индикация данных переключения осуществляется зажиганием светодиода "ЗАЩИТА". Если данный светодиод горит не мигая, следует сделать вывод, что объект управления находится в одном из крайних положений. Для индикации управляющего воздействия, подаваемого на электродвигатель, используются светодиоды с обозначением "+" и "-". Если управляющее воздействие не подается, горят оба светодиода. Это свидетельствует об исправности цепей питания электродвигателя. При подаче положительного или отрицательного воздействия остается зажженным светодиод с соответствующим обозначением.
ЛАБОРАТОРНАЯ РАБОТА
Экспериментальное определение параметров динамических характеристик линейных звеньев систем автоматического
Управления
Цель работы: экспериментальное исследование динамических характеристик моделей линейных звеньев систем автоматического управления (САУ) и определение их параметров по переходным и частотным характеристикам.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
При создание систем автоматического управления технологическими процессами или промышленными объектами необходимо иметь математическое описание объекта управления, управляющего устройства и других элементов, входящих в систему, которые в дальнейшем будут называться звеньями САУ. Математическое описание или математическая модель звена представляет собой совокупность дифференциальных и алгебраических уравнений связи между входными и выходными сигналами. Алгебраические уравнения описывают установившиеся состояния, когда все производные входных и выходных сигналов равны нулю, и называются уравнениями статики. Дифференциальные уравнения характеризуют поведение системы во времени при изменении входных воздействий и называются уравнениями динамики. Для получения динамических характеристик применяют аналитические и экспериментальные методы. Аналитические методы основаны на законах физики, химии, электротехники и др. Часто оказывается эффективным сочетание аналитических методов с экспериментальными. При этом аналитическим путем находят структуру управлений связи, а числовые значения коэффициентов уравнений определяют экспериментально.
Все экспериментальные методы базируются на предположении о сосредоточенности параметров звена (системы), стационарности во времени его динамических свойств и линейности их при малых изменениях входных воздействий. Совокупность рассмотренных допущений позволяет описать динамические свойства отдельного звена или системы математическими выражениями следующего вида:
1) дифференциальным уравнением

где ![]() – входное воздействие;
– входное воздействие;
![]()
![]()
![]() – выходной сигнал (управляемая переменная);
– выходной сигнал (управляемая переменная);
![]()
![]() – постоянные коэффициенты, определяемые физическими параметрами звена (системы); для физически реализуемых систем
– постоянные коэффициенты, определяемые физическими параметрами звена (системы); для физически реализуемых систем ![]()
![]()
2) передаточной функцией
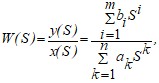
где ![]()
![]() – оператор Лапласа;
– оператор Лапласа;
![]()
![]() – изображения y(t), x(t), соответственно;
– изображения y(t), x(t), соответственно;
3) комплексной передаточной функцией ![]()
![]() или амплитудно-фазовой характеристикой (АФХ)
или амплитудно-фазовой характеристикой (АФХ)
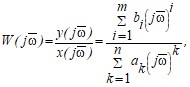
где ![]() и
и ![]()
![]() – преобразования Фурье сигналов y(t) и x(t) соответственно.
– преобразования Фурье сигналов y(t) и x(t) соответственно.
Между перечисленными динамическими характеристиками линейного звена (системы) существует однозначная связь.
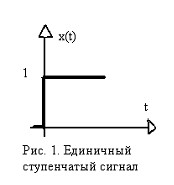
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПО ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКЕ
Переходной характеристикой h(t) называется реакция звена (системы) на единичное ступенчатое воздействие x(t)=y(t) при нулевых начальных условиях.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
