

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
М. П. БОГДАНОВ, А. А. ТАРАСЕНКО
Научный руководитель – Е. Г. ИЗАРОВА, к. п.н., и. о. зав. кафедры ЭиА
Национальный исследовательский ядерный университет «МИФИ»
Озёрский технологический институт – филиал НИЯУ МИФИ
ПОГРЕШНОСТИ АНАЛОГО-ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ И СПОСОБЫ ИХ КОМПЕНСАЦИИ
Рассмотрены погрешности аналого-цифровых преобразователей и способы их уменьшения. Отдельно рассмотрен способ уменьшения погрешности, возникающей при самокалибровке аналого-цифрового преобразователя.
Идеальный аналого-цифровой преобразователь (АЦП) может быть описан только теоретически, физически реализовать его невозможно. Передаточная функция идеального АЦП – это прямая, проходящая через начало координат под углом 45 градусов. Погрешность совершенного АЦП обусловлена только квантованием и не превышает половины величины младшего разряда. Реальный АЦП характеризуется прежде всего абсолютной погрешностью.
Абсолютная погрешность – общая некомпенсированная погрешность, которая включает погрешность квантования, погрешность смещения, погрешность коэффициента передачи и нелинейность.
Погрешность смещения – отклонение фактической передаточной функции АЦП от передаточной функции идеального АЦП при нулевом входном напряжении. Передаточные погрешности изменяют наклон фактической передаточной функции относительно идеального наклона. Эта погрешность компенсируется путём масштабирования выходных значений. Только после компенсации погрешности смещения и передаточной погрешности можно судить о величине нелинейности.
При использовании внутреннего усилительного каскада с большим усилением незначительные отклонения, вызванные особенностями производства АЦП, умножаются. Некомпенсированная погрешность может достигать 20 младших разрядов и выше, поэтому требуется использовать калибровочный алгоритм, снижающий погрешность до 1-2 младших разрядов [2].
Пусть Тс – период калибровки, а Тк – длительность цикла калибровки (см. Рисунок 1). Безразмерная величина, равная отношению Тс к Тк – есть скважность калибровки. Когда калибровка более частая, уменьшается смещение нуля и передаточная погрешность. С другой стороны, в течение времени калибровки Тк значения на входе АЦП не фиксируются. Появляется погрешность, обусловленная ростом числа пропущенных отсчётов. Если частота дискретизации 10 кГц, а время Тк составляет 1,2 мс, потеря составит 12 отсчетов за время калибровки.
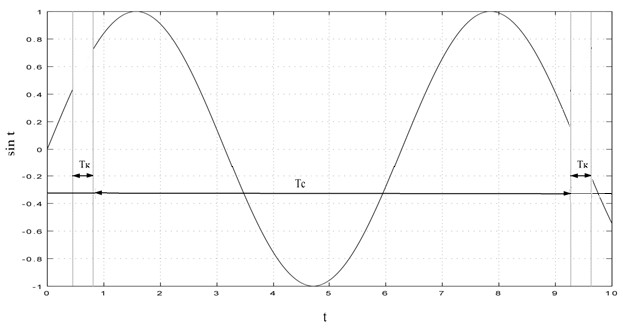
Рисунок 1 – Появление пропущенных отсчётов
Для восстановления пропущенных отсчётов применяют различные методы интерполяции. Для приближения гладких функций подходит полиномиальная интерполяция. В узлах интерполяции значение интерполирующей функции совпадает со значениями рассматриваемой функции. Составляется система уравнений, решением которой являются коэффициенты интерполяционного полинома [1, 3].
Рассмотренная ситуация демонстрирует общую стратегию снижения погрешностей: перевод погрешности, не компенсируемой при обработке результатов, в другой вид, подлежащий исключению математической обработкой. Так от погрешности смещения и передаточной погрешности перешли к погрешности от самокалибровки. А эта погрешность может быть уменьшена до некоторого наперёд заданного значения путём интерполяции.
Список литературы
Королёва пропущенных значений сигнала во время калибровки измерительных систем //Омский научный вестник №1(127), 2014 , Телец ЦАП и АЦП: функционирование, параметры, применение //М.: Энергоатомиздат, 1990 Яковлев сведения по обработке результатов физических измерений//Екатеринбург: Издательство Уральского универститета, 2004
