


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Предложенное суммирование взвешенной квадратичной точки дает точные результаты. Однако при применении многоступенчатой схемы области изображения иногда содержат другие шероховатости, такие как волосы, брови, очки и другие части лица. Следовательно, оценка глазных центров может быть неправильной, поэтому применяется простая постобработка изображения, которая исключает проблемы, возникающие в присутствии посторонних предметов на видеоизображении
Применяется пороговое значение для целевой функции, на основе максимального значения и удаляются все оставшиеся значения, которые связаны с одним из изображением границы. Затем определяется максимум оставшихся значений и используется его положение в качестве оценки центра(Рисунок 11). Для каждого пикселя, мы вычисляем произведение квадратов между точками вектора смещения и вектором градиента изображения. Максимум соответствует положению, где большинство градиентов пересекаются.
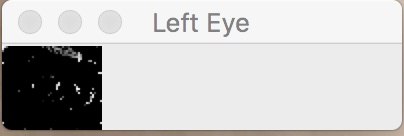
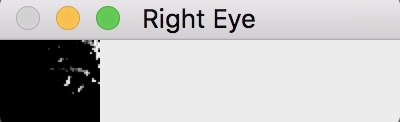
Рисунок 9, 10 Сглаживание изображения
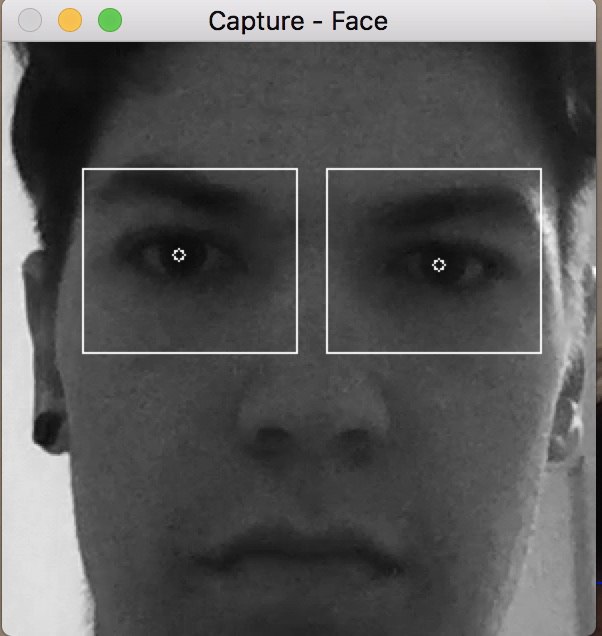
Рисунок 11. Определенеи ценра зрачка, с помощью мксимального пересечения градиентов.
По сравнению с остальными алгоритмами, градиентный алгоритм показывает низкие вычислительные сложности и неизменность к вращению и линейным изменениям освещённости. А также представляется наиболее устойчивым к компьютерному шуму и дает высокие показатели точности и скорости работы.
2.2.3 Интегральная функция CDF распределения
Кумулятивная функция распределения представляет собой алгоритм, где центр радужки определяется адаптивным подходом. Этот метод основан на контрасте роговицы и зрачка глаза [2]. После нахождения областей интереса, содержащих глаза изображение фильтруется и выравнивается на основе CDF распределения (Рисунок 12).
Функция CDF распределения представляет собой следующий алгоритм:
1. На первом этапе изображение в интересующей нас области выравнивается с помощью CDF фильтрации этого региона. Мы находим CDF интегрируя гистограмму каждой области интереса с помощью следующей формулы:
P(w)–гистограмма, представляющая вероятность появления серого уровня (w).
2. Результат первой части содержит несколько различных областей, а не радужную оболочку. Соответственно, удаляются ненужные артефакты и выбираются пиксели с минимальной интенсивностью цвета.
3. Высчитывается средняя интенсивность пикселей на изображении размером 10*10, а также средняя яркость области вокруг пикселей с минимальным светом. Потенциальный кандидат на радужку имеет область с интенсивностью пикселей, меньше чем пороговое значение. В качестве геометрического центра точек выбирается центр зрачка.

Рисунок 12. Шаги CDF алгоритма
2.2.4 Функции GPF проецирования.
Алгоритм функции GPF проецирования в большей степени основан на математических функциях и может быть использован для обнаружения границы различных областей изображения [13].
Множество вертикальных критических точек, таких как {x1..x(n)}, вертикально делят изображение в различных регионах (Рисунок 13). Аналогичным образом определяются горизонтальные критические точки. После получения значений (x1, x2, y1, y2) мы можем определить положение центральной точки глаз с помощью формулы:
![]()
![]()
![]()
![]()
На изображении (Рисунок 14) иллюстрируется процесс поиска (x, y) координат, которые отображает границы век и уголков глаз. На рисунке темная кривая показывает проекцию функции, в то время как серая кривая показывает первую производную от функции.
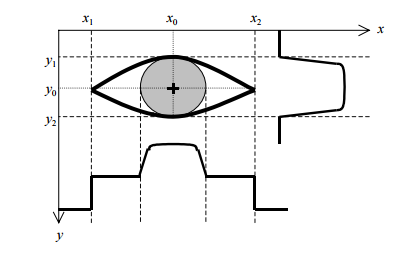
Рисунок 13. Модель глаза
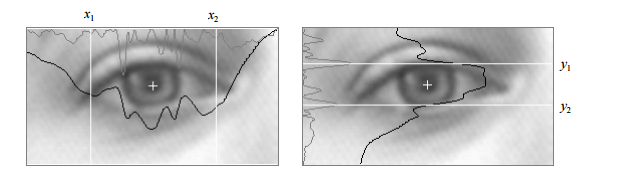
Рисунок 14. Процесс поиска (x, y) координат, которые отображают границы век и уголков глаз
GPF алгоритм является наиболее устойчивым к компьютерному шуму, таким образом мы отсекаем произвольные вариации результатов, вызванные случайным пиксельным искажением, а также видео-шумом.
2.2.5 Edges-Analysis
Данный метод использует пиксели ребра для информации о размещении глаза в изображении человеческого лица [6]. Входной кадр обрабатывается алгоритмом обнаружения грани, разработанным для цифровых изображений, до применения фильтра гаусовского размытия для удаления нежелательного шума.
Верхнее пороговое значение определяет минимальный градиент, необходимый для классификации пикселя в качестве компонента ребра. На границах, между верхним и нижним пороговым значением, находятся пиксели градиентов, которые имеют по меньшей мере один краевой пиксель в качестве соседа. Пороговое значение защищает от расщепления ребра в регионе с низким уровнем контрастности.
Изображение нормализуется в пределах области, представляющей интерес. Затем алгоритм поочередно ищет вертикальные и горизонтальные линии, пересеченные с обнаруженными границами. Если расстояние между двумя вертикальными линиями с максимальным числом пересечений оказывается больше, чем пороговое значение, то положение зрачка выбирается в середине двух найденных линий (Рисунок 15). В противном случае, вторая вертикальная линия отклоняется и тест будет проверяться дальше в поисках следующей линии по количеству пересечений.
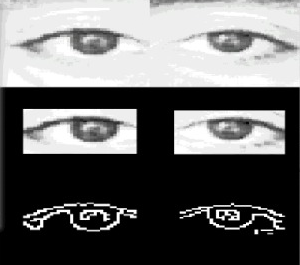
Рисунок 15. Шаги алгоритма Edge Analysis.
2.3. Оценка стабильности рассмотренных алгоритмов
Временная стабильность | Вероятность погрешности | |
Преобразование Хаафа | 92.3 % | 0,09 % |
Градиент | 97.6 % | 0,04 % |
CDF распределение | 96.04 % | 0,07 % |
GPF проецирование | 97.1 % | 0,07 % |
Edges-Analysis | 97.2 % | 0,13 % |
Таблица 1. В данной таблице представлена оценка врменной стабильности и вероятность погрешности пяти различных алгоритмов [4].
3. Автоматизированное определение направления взгляда по видеоизображению
3.1 Процедура калибровки
Перед началом работы eye-tracker систем проводится процедура калибровки, которая необходима для выявления параметров, определяемых характерными анатомическими особенностями конкретного испытуемого.
Существуют две основные проблемы калибровочного процесса:
- Длительная продолжительность времени для калибровки оборудования в пользовательском сеансе
- Дискомфорт испытуемых, которые не привыкли долгое время смотреть в одну точку.
Типичная процедура калибровки проходит следующим образом, пользователю показывается набор визуальных целей (Рисунок 16), на которых испытуемый должен заострить внимание, в то время как производятся соответствующие измерения. От их соответствия, вычисляется функция калибровки.
Точное сопоставление координат изображения с координатами экрана компьютера в реальном времени необходимо для эффективного управления устройством [3]. Отображение между координатами экрана и измерениями движения глаз проводится с использованием следующего уравнения:
(sx; sy) – координаты экрана; (x, y) – координаты зрачка; (a0, a1, b0, b1) – коэффициенты.
Стандартный набор линейной калибровки состоит из 5-20 калибровочных точек, равномерно распределенных по экрану. Каждая точка должна фиксировать взгляд, для сбора набора данных. Чем больше записей получено во время анализа, функция получается более надежной.
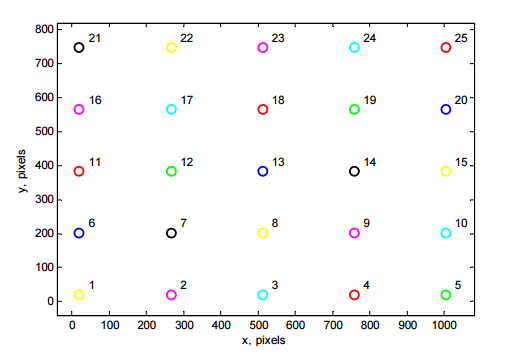
Рисунок 16. Калибровочные точки на экране
Однако, хорошее расположение калибровочных точек дает возможность уменьшить их количество, тем самым сокращая процесс калибровки, не уменьшая уровень точности [14].
Рисунок 17. Точки калибровки на экране

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
