
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
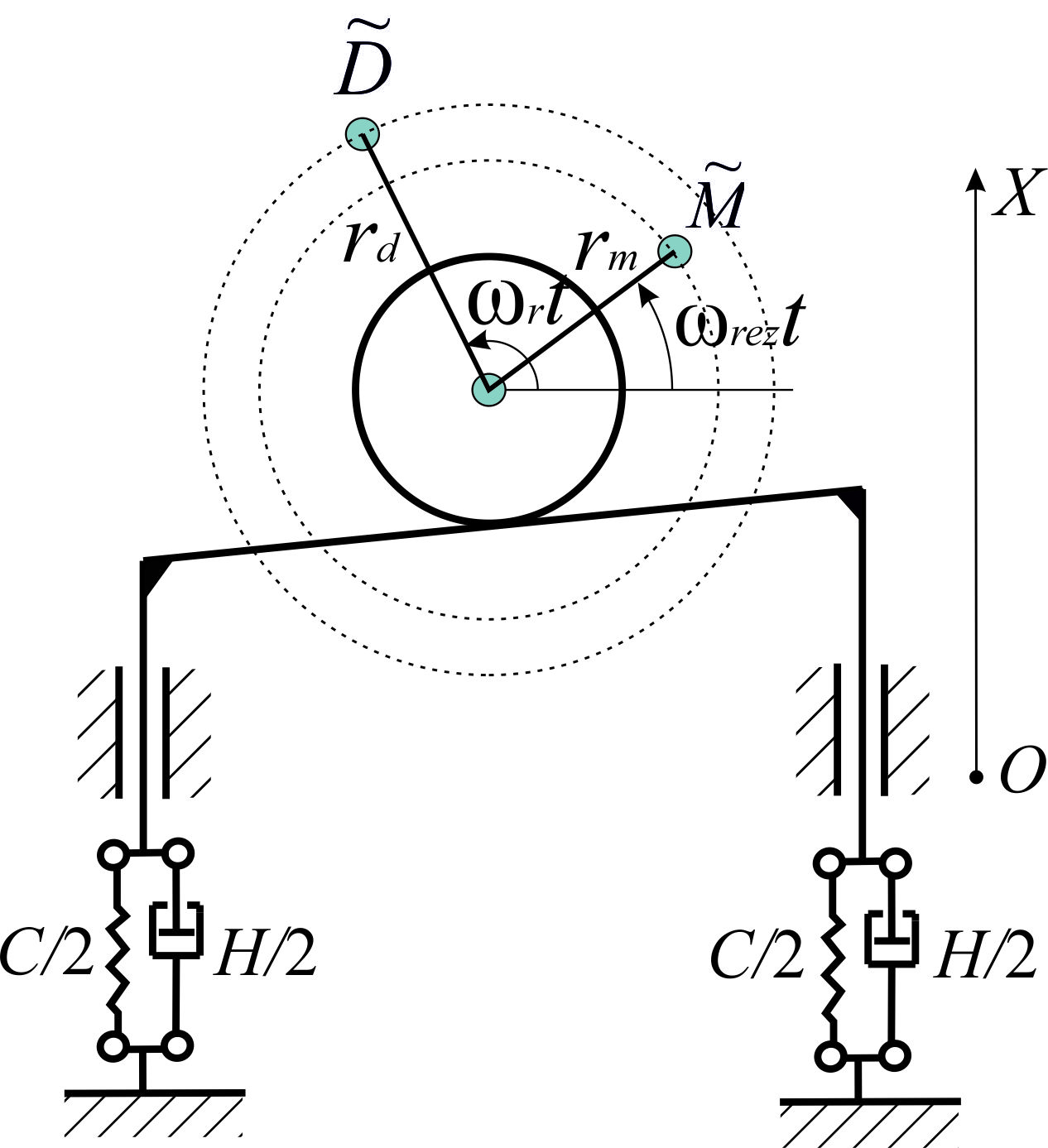
В модернизированной машине (рис. 1, б) используется двухчастотный виброовозбудитель. Он состоит из неуравновешенной массы ![]() на корпусе автобалансира и корректирующих грузов суммарной массой
на корпусе автобалансира и корректирующих грузов суммарной массой ![]() . Коэффициент жесткости опоры обозначим как
. Коэффициент жесткости опоры обозначим как ![]() . Коэффициент вязкости опоры обозначим как
. Коэффициент вязкости опоры обозначим как ![]() .
.
 а
а
 б
б
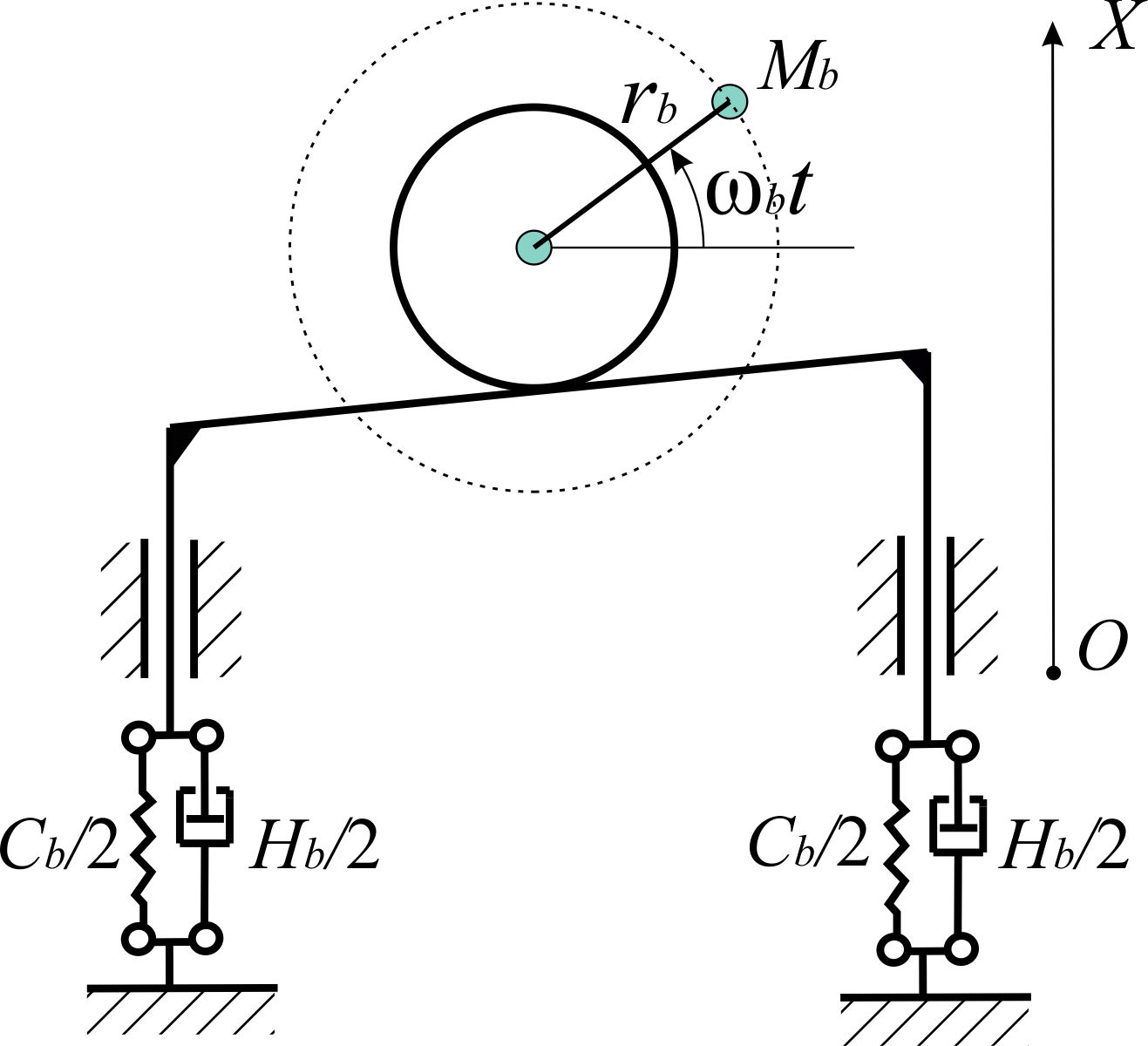
Рис. 1. Схема машины:
а – базовой; б – модернизованной.
При работе автобалансира в качестве вибровозбудителя его корректирующие грузы практически собираются вместе. Поэтому будем рассматривать их как единое целое. Корректирующие грузы вращаются с наинизшей частотой собственных колебаний короба машины ![]() . Их положение определяется радиусом
. Их положение определяется радиусом ![]() и углом
и углом ![]() . Неуравновешенная масса
. Неуравновешенная масса ![]() вращается с частотой вращения ротора
вращается с частотой вращения ротора ![]() . Ее положение определяется радиусом
. Ее положение определяется радиусом ![]() и углом
и углом ![]() .
.
Считаем, что массы вибровозбудителей существенно не влияют на общую массу ![]() короба базовой или модернизированной машин.
короба базовой или модернизированной машин.
Параметры, характеризующие динамику базовой и модернизированной машин, приведены в табл. 1.
Таблица 1 – Параметры машины
Параметр \ машина | базовая | модернизованная |
Коэффициент жесткости опоры |
|
|
Коэффициент вязкости опоры |
|
|
Масса дебаланса |
| – |
Общая масса короба машины |
|
|
Круговая частота вращения дебаланса / корректирующих грузов |
|
|
Круговая частота вращения неуравновешенной массы | – |
|
Радиус вращения дебаланса |
| – |
Радиус вращения неуравновешенной массы | – |
|
Расстояние от продольной оси ротора до центра масс корректирующего груза | – |
|
Неуравновешенная масса | – |
|
Суммарная масса корректирующих грузов | – |
|
2. Дифференциальное уравнение движения модернизованной машины в размерном и безразмерном виде.
С использованием теоремы о движении центра масс механической системы можно получить такое дифференциальное уравнение поступательного движения короба (без учета сил тяжести):
![]()
![]() , (1)
, (1)
где точки над координатой X обозначают производные по времени, а остальные обозначения расшифрованы в таблице 1.
Таким образом, на динамику модернизированной машины влияют девять размерных параметров
![]() .
.
Введем новые параметры (приведенные к радиусу r массы корректирующих грузов и дебаланса на корпусе автобалансира)
![]() . (2)
. (2)
Тогда уравнение (1) примет вид
![]()
![]() . (3)
. (3)
Для дальнейшего упрощения вида дифференциального уравнения движения приведем его к безразмерному виду. Введем характерные масштабы: ![]() – для расстояния;
– для расстояния; ![]() – для времени. Введем новые безразмерные переменные:
– для времени. Введем новые безразмерные переменные: ![]() – расстояние;
– расстояние; ![]() – время. Тогда
– время. Тогда
![]() ,
, ![]() ,
, ![]() ,
, ![]() , (4)
, (4)
где штрих за величиной означает производную по безразмерному времени.
Подставляя (4) в (3), после умножения на ![]() , получим
, получим
![]()
![]() . (5)
. (5)
Выберем характерные масштабы с целью максимального упрощения вида дифференциального уравнения движения. Пусть
![]() ,
, ![]()
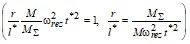 . (6)
. (6)
Тогда уравнение (5) примет вид
![]()
![]() . (7)
. (7)
В вибровозбудителе, образованном корректирующими грузами, последние застревают на резонансной частоте колебаний короба. Поэтому при небольших силах вязкого сопротивления в опорах
![]() . (8)
. (8)
Подставляя (8) в (7) окончательно получаем такое дифференциальное уравнение движения машины в безразмерном виде
![]() , (9)
, (9)
где введены такие безразмерные параметры
![]() ,
, ![]() ,
, ![]() . (10)
. (10)
Таким образом на динамику машины влияют три существенно разных безразмерных параметра:
![]() – характеризует силы сопротивления в опорах;
– характеризует силы сопротивления в опорах;
![]() – отношение возбуждаемых вибровозбудителем частот;
– отношение возбуждаемых вибровозбудителем частот;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
