

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Воспользовавшись выражением (78) с учетом зависимости (80), получим
![]()
Тогда
![]()
На рис. 64, а, б и в показаны эпюры скоростей проскальзывания элементов пневматической шины Дvn, построенные с помощью выражения (84).
При построении эпюр величины Дvn отложены по вертикали, причем их положительные значения направлены вниз, а отрицательные — вверх от поверхности контакта пневматической шины.
При и = 1 (рис. 64, а) все элементы пневматической шины, за исключением находящегося в центральной опорной точке О, проскальзывают в сторону, противоположную направлению поступательного движения оси колеса, т. е. буксуют. Степень их буксования определяется значением Дvn — возрастает по мере удаления от вертикали, проходящей через центр колеса, достигая максимального значения в точках пит.
При и > 1 (рис. 64, б) все без исключения элементы пневматической шины проскальзывают в сторону, противоположную направлению поступательного движения оси колеса, т. е. буксуют.
Наконец, когда качение колеса сопровождается юзом, то в зависимости от значения и < 1 (рис. 64, в) проскальзывание элементов пневматической шины может носить двоякий характер.
При и незначительно меньше единицы элементы пневматической шины, находящиеся в центральной части области контакта, проскальзывают в направлении, совпадающем с направлением поступательного движения оси колеса. Что касается элементов пневматической шины, расположенных на периферийной части, то они будут проскальзывать в противоположную сторону, т. е. буксовать.
Если же и значительно меньше единицы, то эпюра Дvn будет только отрицательной, поскольку все элементы пневматической шины будут скользить в одном направлении, совпадающем с направлением поступательного движения оси колеса.
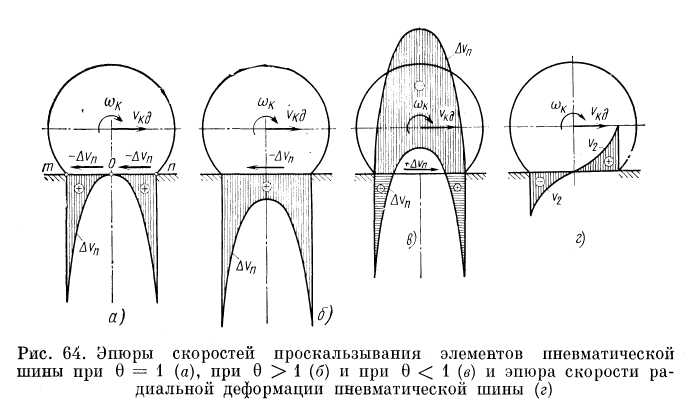
На рис. 64, г показана эпюра скорости радиальной деформации, построенная по формуле (79). Как видно, в зоне загрузки пневматической шины эпюра является положительной и характеризует скорости сжатия пневматической шины v2, которые отложены вверх от поверхности качения. В зоне разгрузки эпюра имеет отрицательные значения и определяет скорости восстановления формы шины до недеформированной. Следует отметить, что эпюра скорости v2 не зависит от режима работы колеса.
На рис. 65, а показана схема сил и моментов, действующих на колесный движитель с пневматической шиной при работе на режиме «ведущего колеса». Принято, что поверхность качения горизонтальна, а движение равномерное.
На схеме использованы следующие обозначения:
Gк — вертикальная нагрузка на ось колеса с учетом его собственного веса;
Fк — горизонтальная реакция на ось колесного движителя (сила сопротивления движению);
Мк — крутящий момент, подводимый к колесному движителю;
R и Т — вертикальная и горизонтальная реакции поверхности качения — составляющие равнодействующей реактивных сил, действующих на пневматическую шину со стороны поверхности качения;
rс — силовой радиус колесного движителя;
а — коэффициент трения качения.

Уравнение равновесия колесного движителя можно записать следующим образом:
![]()
Разделив это уравнение на rс и имея в виду, что Gк = R, получим
![]()
Отношение ![]() характеризует окружную силу колесного движителя.
характеризует окружную силу колесного движителя.
Горизонтальная составляющая равнодействующей реактивных сил Т представляет собой силу тяги, которая передается от оси колесного движителя к раме машины для земляных работ. Отношение ![]() характеризует приведенный коэффициент сопротивления качению колесного движителя, или сокращенно коэффициент сопротивления качению. Тогда представленное выше выражение может быть переписано следующим образом:
характеризует приведенный коэффициент сопротивления качению колесного движителя, или сокращенно коэффициент сопротивления качению. Тогда представленное выше выражение может быть переписано следующим образом:
![]()
Произведение fGк — фиктивная сила сопротивления качению, которую обозначим Pf. Следовательно, окончательно будем иметь
![]()
Таким образом, в тех случаях, когда рассматриваются силы, действующие на колесный движитель, можно вводить фиктивную силу сопротивления качению Рf = fR — fGк.
Максимальное значение силы тяги Тц, которую может развить колесный движитель, определяется условием сцепления пневматической шины с поверхностью качения
![]()
где
ц — коэффициент сцепления пневматической шины колесного движителя с поверхностью качения.
На рис. 65, б показана схема сил и моментов, действующих на колесный движитель при работе на режиме «свободного колеса». На ось колесного движителя в данном случае действует только одна сила — вертикальная нагрузка Gк. В связи с этим равнодействующая реактивных сил, действующих на пневматическую шину со стороны поверхности качения, будет направлена вертикально. Обозначим ее как и раньше через R. Тогда уравнение равновесия колесного движителя будет
![]()
Разделим это уравнение на гс и, принимая во внимание, что Gк = R, получим
![]()
Обозначая, как и в предыдущем случае, ![]() и
и ![]() , будем иметь
, будем иметь
![]()
или
![]()
где, как и прежде,
![]()
Следовательно, окружная сила колесного движителя, работающего на режиме «свободного колеса», равна силе сопротивления качению. Схема сил, действующих на ведомое колесо с пневматической шиной при качении по горизонтальной поверхности с равномерной действительной скоростью поступательного движения оси колеса, приведена на рис. 65, в.
Качение колеса происходит под действием толкающей силы Р'к, приложенной к его оси и направленной параллельно поверхности качения. Горизонтальная составляющая равнодействующей реактивных сил у ведомого колеса направлена в сторону, противоположную направлению поступательного движения его оси.
Составляющая Т равнодействующей реактивных сил является силой трения, обуславливающей возможность качения ведомого колеса.
Условие равновесия ведомого колеса определяется равенством
![]()
или
![]()
так как
![]()
Таким образом, сила Р'к совместно с горизонтальной составляющей Т, равнодействующей реактивных сил, образует пару сил, момент которой при равномерном поступательном движении оси колеса уравновешивается моментом сопротивления качению. Следовательно, сила Р'к по абсолютному значению равна фиктивной силе сопротивления качению Pf. Тогда, разделив приведенное выше уравнение на rс и имея в виду, что R = Gк, окончательно получим
![]()
§ 31. СОПРОТИВЛЕНИЕ КАЧЕНИЮ КОЛЕСА С ПНЕВМАТИЧЕСКОЙ ШИНОЙ
В качестве примера рассмотрим расчет сопротивления качению ведущего колеса, когда деформируется как шина, так и поверхность качения — грунт.
Преобладающим видом деформации грунта колесом является вертикальное сжатие. Поэтому в первую очередь необходимо принять закон, характеризующий зависимость между нормальными контактными напряжениями а и полной деформацией грунта х.
В типичных грунтовых условиях работы машины для земляных работ, когда у ≤ 2,5 кГ/см2, закон деформации сжатия грунта для случая деформирования грунта колесом с пневматической шиной может быть представлен следующим образом:
в зоне загрузки (рис. 66, участок пО)
![]()
где
С1 — коэффициент полной деформации грунта;
х — полная деформация грунта; в зоне разгрузки (участок тО)
![]()
где
С2 — коэффициент упругой деформации грунта;
х — упругая деформация грунта.
Основой оценки механических свойств пневматических шин при исследовании процесса взаимодействия является закон деформации шины, определяющий зависимость нормальных контактных напряжений а от радиальной деформации шины у.
Пусть радиальная деформация пневматической шины у не превышает своего критического значения, тогда законы деформации будут:
Расчетная схема взаимодействия пневматической шины колесного движителя с грунтом, полученная на основании анализа опытных данных, показана на рис.66.


|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
