

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где ![]() – комплексный коэффициент усиления объекта,
– комплексный коэффициент усиления объекта,
![]() – комплексный коэффициент усиления регулятора.
– комплексный коэффициент усиления регулятора.
Суть метода заключается в том, что в регуляторе выключают интегральную и дифференциальную составляющие, т. е. С0 = 0 и С2 = 0. Меняя настройку П-регулятора, выводим систему на границу устойчивости, т. е. добиваемся, чтобы в замкнутой системе совершались незатухающие колебания.
Далее находим передаточную функцию объекта регулирования и представляем ее в показательной форме. И для нахождения критической частоты ![]() и критической настройки
и критической настройки ![]() нужно решить систему уравнений:
нужно решить систему уравнений:
 (5)
(5)
где ![]() - АЧХ объекта регулирования и регулятора,
- АЧХ объекта регулирования и регулятора,
![]() - ФЧХ объекта регулирования и регулятора соответственно.
- ФЧХ объекта регулирования и регулятора соответственно.
Для П-регулятора передаточная функция будет иметь вид: ![]() или в показательной форме
или в показательной форме ![]() , т. е.
, т. е. ![]() , а
, а ![]() .
.
Тогда, для П-регулятора, система уравнений (5) примет вид:
 (6)
(6)
И зная, что ![]() (7) и
(7) и ![]() (8), найдем из второго уравнения системы (6) критическую частоту
(8), найдем из второго уравнения системы (6) критическую частоту ![]() и подставив ее в 1-е уравнение системы найдем критическую настройку
и подставив ее в 1-е уравнение системы найдем критическую настройку ![]()
![]() .
.
Мы нашли критическую настройку, при которой одноконтурная система, будет находиться на границе устойчивости, т. е. в ней будут происходить незатухающие колебания. Далее, для определения параметров регуляторов, используются эмпирические формулы. Для ПИ-регулятора оптимальные настройки принимают следующие значения:
![]() (9),
(9), ![]() (10)
(10)
![]()
![]() ,
, ![]()
![]()
Переходный процесс в одноконтурной системе (рис.1) при данных настройках регулятора имеет следующий вид (рис. 2):
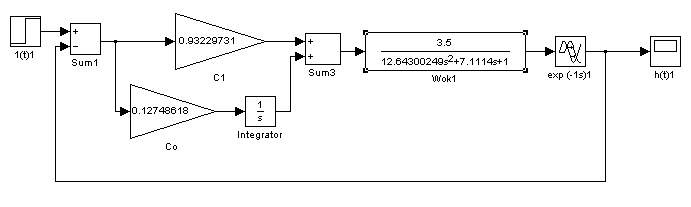
Рис.1. Одноконтурная система с ПИ-регулятором при подаче на вход 1(t).
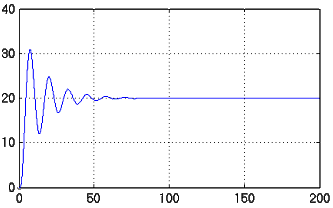
Рис. 2. Переходной процесс в одноконтурной системе при подаче на вход 1(t).
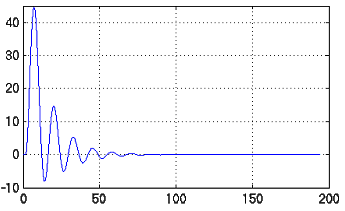
Рис. 3. Переходной процесс в одноконтурной системе при подаче на вход возмущения.
3.4.3 Исследование одноконтурной системы на устойчивость
Для исследования системы на устойчивость воспользуемся критерием Найквиста.
Найдем передаточную функцию разомкнутой системы. Она будет равна произведению передаточных функций регулятора и объекта управления:
![]() (11)
(11)
Т. к. в передаточной функции присутствует одно интегрирующее звено, то данная система – астатическая с астатизмом первого порядка ![]() . Сделаем замену
. Сделаем замену ![]() . Поскольку при
. Поскольку при ![]() , т. е. годограф претерпевает разрыв, поэтому чтобы воспользоваться критерием Найквиста введем вспомогательный годограф, который образует замкнутый контур, т. е. интегрирующее звено заменим апериодическим:
, т. е. годограф претерпевает разрыв, поэтому чтобы воспользоваться критерием Найквиста введем вспомогательный годограф, который образует замкнутый контур, т. е. интегрирующее звено заменим апериодическим:
![]() (12)
(12)
При ![]() годограф будет растягиваться и точка на действительной оси
годограф будет растягиваться и точка на действительной оси ![]() . В результате годографы совпадут за исключением точки
. В результате годографы совпадут за исключением точки ![]() . В соответствии с этим сформулируем критерий Найквиста для астатических систем: для определения устойчивости замкнутой системы годограф разомкнутой системы с астатизмом любого порядка добавляют дугой бесконечно большого радиуса до действительной положительной полуоси, а далее применяют первую или вторую формулировку критерия Найквиста, в зависимости от того устойчива или не устойчива разомкнутая система.
. В соответствии с этим сформулируем критерий Найквиста для астатических систем: для определения устойчивости замкнутой системы годограф разомкнутой системы с астатизмом любого порядка добавляют дугой бесконечно большого радиуса до действительной положительной полуоси, а далее применяют первую или вторую формулировку критерия Найквиста, в зависимости от того устойчива или не устойчива разомкнутая система.
Корни характеристического уравнения разомкнутой системы отрицательны, значит разомкнутая система устойчива. Т. е. воспользуемся первой формулировкой критерия Найквиста, которая гласит: если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф разомкнутой системы не обхватывал точку с координатой (-1 ; j0).
Годограф разомкнутой системы (рис.4) не обхватывает точку (-1 ; j0), значит замкнутая система устойчива. Запас устойчивости по амплитуде ![]() .
.
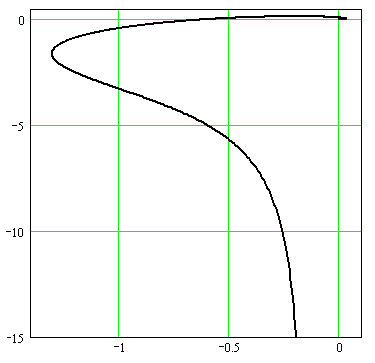
Рис.4. Годограф разомкнутой системы.
3.4.4 Расчет комбинированной АСР
При анализе сушильного барабана песка как объекта управления было выявлено наиболее сильно влияющее на режим его работы внешнее возмущение, которое можно измерить. Это – изменение температуры и влажности песка, поступающего на сушку. В этом случае целесообразно построение комбинированной АСР. Такая система позволяет максимально ослабить влияние контролируемого возмущения на регулируемую величину с помощью компенсатора, оставляя на долю регулятора с обратной связью отработку величины задания не полностью скомпенсированного измеряемого возмущения, а также тех возмущений, действующих на объект, которые измерить не удаётся.
Регулятор температуры будет получать ее текущее значение, учитывать текущее значение возмущения и воздействовать на регулирующий затвор на линии подачи газа с целью изменения его расхода. В качестве закона регулирования выбираем ПИ-закон, обеспечивающий астатическое регулирование достаточно высокого качества. Сигнал с устройства компенсации возмущения будем подавать на вход регулятора.
3.4.4.1 Определение рабочей частоты
Основой расчета комбинированных систем регулирования является принцип инвариантности. Который можно сформулировать следующим образом: отклонение выходной координаты ТОУ y(t) под действием возмущения x(t) должно быть тождественно равны нулю:
![]() (13)
(13)
Переходя к изображениям по Лапласу y(р) и x(р) сигналов y(t) и x(t),
условие (13) при y0(t)=0 можно преобразовать к виду:
![]() (14)
(14)
Равенство (144.6) используется для вывода передаточной функции компенсатора Rk(p) при заданных характеристиках объекта по каналам возмущения WОВ(p) и регулирования WОУ(p).
Преобразованные структурные схемы комбинированной АСР при подаче компенсирующего воздействия на вход объекта и при подаче компенсирующего воздействия на вход регулятора представляют последовательное соединение разомкнутой системы и замкнутого контура, передаточные функции которых равны:
![]() (4.7)
(4.7) ![]() (15)
(15)
![]() (16)
(16)
Передаточная функция комбинированной АСР:
![]() или
или ![]()
Так как ![]() , то условие инвариантности перепишем в виде:
, то условие инвариантности перепишем в виде:
![]() (17)
(17)
Комбинированную АСР можно рассматривать, как двухступенчатый фильтр для сигнала возмущения, состоящий из разомкнутой системы и замкнутого контура. Характерной особенностью замкнутой системы регулирования является наличие пика на АЧХ на рабочей частоте ![]() , в окрестности которого она обладает наихудшими фильтрующими свойствами. Поэтому условие приближенной инвариантности обеспечивается для частот
, в окрестности которого она обладает наихудшими фильтрующими свойствами. Поэтому условие приближенной инвариантности обеспечивается для частот ![]() и
и ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
