


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ»
Кафедра машин и технологии обработки металлов давлением
ПРОМЫШЛЕННЫЙ РОБОТ МП-9С
Методические указания к проведению лабораторной работы по дисциплине
"Автоматизация, робототехника и ГПС кузнечно-штамповочного производства"
для студентов специальности
"Машины и технология обработки металлов давлением"
(120400)
Новокузнецк
2003
УДК 621.38(62)
П
Рецензент:
Кандидат технических наук,
Доцент кафедры МОМЗ ГОУ ВПО «СибГИУ»
П Промышленный робот МП-9С: Метод. указ./Сост.: : ГОУ ВПО «СибГИУ». – Новокузнецк, 2003. – 17с., ил.
Изложено назначение, устройство и порядок эксплуатации промышленного робота МП-9С.
Цель работы: изучение конструкции робота, овладение навыками эксплуатации и обслуживания.
Работа предназначена для студентов специальности «Машины и технология обработки металлов давлением» (120400).
Содержание
Краткое описание манипуляционной системы робота МП-9С 4
Порядок выполнения работы 10
Отчёт о работе 12
Контрольные вопросы 12
Техника безопасности 12
Список литературы 13
Краткое описание манипуляционной системы робота МП-9С
Пневматический робот МП-9С предназначен для автоматизации технологических процессов в промышленности, преимущественно для обслуживания штамповочных прессов. Робот, оснащённый захватным устройством пневматического или механического типа, способен осуществлять захват, перенос и позиционирование детали в заданной точке рабочей зоны.
Техническая характеристика
Грузоподъёмность - 0,2 кг
Число степеней подвижности - 3
Рабочая система координат - цилиндрическая
Максимальная величина перемещения
- механизма выдвижения - 180 мм
- механизма подъёма - 30 мм
- механизма подъёма - 120 град.
Тип привода - пневматический
Рабочее давление воздуха - 0,4-0,5 МПа
Тип системы управления - цикловая
Позиционирование - по механическим упорам
Число точек позиционирования по каждой
степени подвижности - 2
Точность позиционирования - +/- 0,05 мм
Масса - 40 кг
Общий вид манипулятора изображён на рисунке 1.
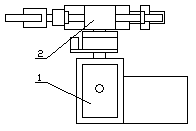
Рисунок 1. Общий вид манипулятора робота МП-9С.
Механизмы подъёма и поворота смонтированы в корпусе манипулятора 1.Кроме того, в корпусе размещена пневмоаппаратура, выполнены пневмо и электропроводка.
Механизм выдвижения руки смонтирован в отдельном корпусе 2.
Механизм подъёма (рисунок 2) состоит из корпуса 3, штока 2, крышек 1, 5, 6. Рабочие полости цилиндра уплотняются манжетами 8 и прокладками. Шток цилиндра выполнен неподвижным, а корпус цилиндра - подвижным. Внутри штока на подшипниках 7 установлен вал 2 механизма поворота. Заданная величина хода вертикального перемещения достигается регулировкой механических упоров, которые установлены на неподвижной направляющей в корпусе манипулятора. При подаче сжатого воздуха в полости цилиндра, корпус цилиндра 3 перемещается.
Механизм поворота (рисунок 3) имеет корпус цилиндра 6, в котором перемещается шток 3. Средняя часть штока выполнена в виде рейки, зубья которой входят в зацепление с валом поворота 2 (рисунок 2), установленным в штоке механизма подъема. Шток 3 уплотняется манжетами 2, 5, а полость цилиндра прокладками 1. При подаче воздуха в полости пневмоцилиндра шток-рейка 3 перемещается и сообщает вращательное движение валу 2 (рисунок 2). В верхней части вал имеет фланец для крепления руки робота. Фланец снабжен упорами, которые обеспечивают заданный угол поворота. Регулировка угла поворота выполняется перемещением подвижных упоров, закрепленных на корпусе робота. На корпусе также закреплен демпфер.
Механизм выдвижения руки робота (рисунок 4) содержит следующие основные детали: корпус 5, шток с поршнем 6, направляющую 8, регулируемые упоры 3 и 7, демпфер 4. Пневмоцилиндр выполнен в виде гильзы 1, установленной в корпусе 5. В гильзе перемещается шток с поршнем 6. Шток уплотняется манжетой 2, установленной в крышке. Направляющая 8 служит для предотвращения проворота штока. При подаче воздуха в соответствующую полость цилиндра шток 6 с направляющей 8 и упорами 3 и 7 перемещается до касания штока демпфера 4 и его срабатывания. Перемещение руки регулируется соответствующей установкой упоров 3 и 7.
Механизм захватного устройства (ЗУ) в качестве двигателя имеет линейный пневмоцилиндр одностороннего действия. При подаче воздуха в полость ци-
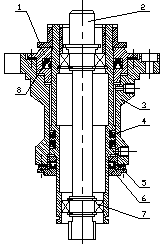
Рисунок 2. - Механизм подъема.

Рисунок 3. - Механизм поворота
линдра (рисунок 5) поршень перемещается, при этом клиновыми поверхностями действует на рычаги ЗУ, сжимая его. При снятии давления воздуха поршень возвращается назад под действием возвратной пружины. При этом рычаги ЗУ разжимаются под действием пружины рычагов.
Привод робота (рисунок 6) имеет функциональные блоки:
- блок подготовки сжатого воздуха; блок распределения сжатого воздуха: система передачи сжатого воздуха между устройствами привода.
Из магистрали сжатый воздух через входной штуцер 1 и запорный вентиль 2 попадает в блок подготовки, имеющий в составе влагоотделитель 3, регулятор давления 4, манометр 5 и маслораспылиВо влагоотделителе из воздуха удаляется влага. Регулятор давления понижает давление воздуха до требуемой величины и поддерживает его неизменным при колебаниях давления в магистральном трубопроводе.
Маслораспылитель обеспечивает распыление в потоке сжатого воздуха масла, необходимого для смазки трущихся элементов исполнительных двигателей и распределителей. Контроль давления сжатого воздуха, поступающего к устройствам робота, выполняется визуально по манометру 5.
Блок подготовки воздуха выполняется автономно и входит в комплект манипулятора.
В блоке распределения сжатого воздуха робота МП-9С применены распределители клапанного типа с электроуправлением, нормальнозакрытые, с помощью которых по заданной программе можно выполнять открытие и закрытие доступа сжатого воздуха в полости исполнительных двигателей. На каждую степень подвижности в роботе установлены по два автономных клапана - для повышения надёжности.

Рисунок 4. – Механизм выдвижения руки

Рис. 5. Кинематическая схема захватного устройства.
Каждая степень подвижности имеет линейный исполнительный двигатель в виде цилиндра одно - или двустороннего действия, конструкция которого обеспечивает заданные перемещения, скорости и усилия. Регулировка скорости выходного звена двигателя, а следовательно и степени подвижности, осуществляется путём изменения расхода сжато го воздуха на выходе двигателя с помощью регулировки проходного сечения пневматического дросселя, встроенного в каждый электроклапан.
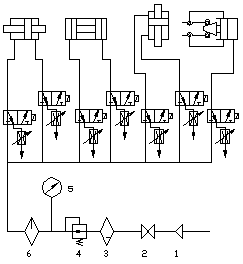
Рисунок 6. - Схема пневмопривода робота.
Последовательность и число срабатываний степеней подвижности робота определяется программой, заложенной в систему программного управления (СПУ) ЭЦПУ-6030. Сигнал о срабатывании степени подвижности поступает на СПУ от электромагнитных контактов (КЭМ), закреплённых неподвижно на корпусе механизма соответствующей степени подвижности. Замыкание контактов происходит при приближении к ним постоянных магнитов, установленных на подвижных частях механизма степени подвижности.
Торможение при подходе к конечному положению механизмов выдвижения и поворота осуществляется гидравлическими демпферами, механизма подъёма - за счёт дросселирования сжатого воздуха на входе и выходе из цилиндра.
Схема демпфера представлена на рисунке 7. Поршни 1 и 3 жёстко соединены штоком 2. Выходное звено степени подвижности при подходе к заданному положению нажимает упором на шток 2 демпфера. Поршни 1 и 3 вместе со штоком 2 перемещаются вправо, при этом рабочая жид кость из полости А вытесняется через зазор Б в полость В. При перетекании жидкости через зазор Б, который представляет собой местное сужение потока, происходит потеря энергии. Чем больше вязкость жидкости и меньше зазор Б, тем большее усилие требуется для перемещения штока 3 и тем значительнее демпфирование.
В качестве рабочей жидкости используется минеральное масло. Зазор Б регулируется перемещением дросселирующей иглы 4.
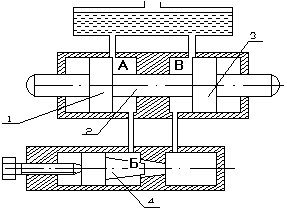
Рисунок 7. - Схема демпфирующего устройства.
Порядок выполнения работы
1. Изучить принцип работы и конструкцию приводов, используя описание и реальную конструкцию. При изучении конструкции необходимо снять кожух и боковые крышки манипулятора. Определить места установки основных узлов манипулятора. Обратить внимание на конструкцию дросселей и способ их регулировки, расположение демпферов механизмов подъёма и выдвижения руки.
2. Подготовить робот к работе:
- проверить наличие масла в емкостях амортизаторов механизмов поворота и выдвижения руки. Добавить масло в случае необходимости;
- проверить наличие смазки для направляющей руки в маслёнке;
- проверить смазку трущихся поверхностей механизмов манипулятора;
- проверить, закрыт ли запорный вентиль 2 (рисунок 6);
- проверить готовность блока подготовки воздуха, т. е. наличие необходимого количества масла в маслораспылителе, отсутствие влаги во влагоотделителе;
- включить электропитание, нажав кнопку СЕТЬ на СПУ. На пульте загорается лампочка СЕТЬ.
- проверить настройку КЭМов по каждой степени подвижности, для чего вручную выполнить прямой и обратный ходы. При надёжном срабатывании контактов на пульте управления должно засветиться табло о выполнении команды;
- открыть запорный вентиль 2;
- установить с помощью редукционного клапана давление питания пневмосистемы сжатым воздухом 0,4 МПа (4 кг/см 52 0), контроль за величиной давления производить по манометру 5;
- поставить кнопочный переключатель режимов в положение РУЧНОЙ;
- в режиме РУЧНОЙ проверить работу манипулятора по каждой степени подвижности, произведя 5-6 повторений на каждом движении. Каждое движение должно выполняться без сбоев и затираний;
- проверить эффективность торможения механизмов степеней подвижности манипулятора при повороте и выдвижении, не допускать резких ударов подвижных частей по упорам. При необходимости произвести регулировку дроссельной иглы демпфера.
3. В режиме РУЧНОЙ реализовать команды выдвижения, поворота и подъёма руки, сжатия и разжатия схвата. Оценить быстродействие степеней подвижности робота с помощью секундомера.
4. Определить точность позиционирования полюса схвата робота при выдвижении ЗУ:
- установить в ЗУ груз, имеющий держатель для иглы (рис.8);
- выполнить команды "Движение вперёд" и "Движение назад". С помощью иглы на координатной бумаге отметить крайнее положение центра груза;
- повторить движения прямого и обратного ходов 10-15 раз;
- определить точность позиционирования δ из соотношения
δ =0,5(А-d),
где А - максимальная зона рассеяния отметок иглой на координатной бумаге центра груза; d - диаметр иглы;
- полученный результат сравнить с техническими данными робота.
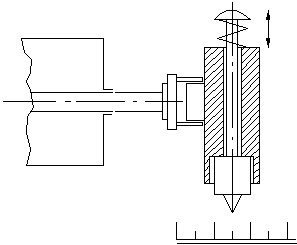
Рисунок 8. - Схема определения точности позиционирования.
Отчёт о работе
Отчёт должен содержать:
1) схему пневмопривода;
2) условия проведения и объём выполненных работ;
3) полученные результаты;
анализ результатов и выводы.Контрольные вопросы
1. Описать конструкцию механизмов манипуляционной системы робота.
2. Объяснить принцип действия и конструктивные особенности пневмопривода робота, отдельных узлов.
3. Указать способы демпфирования каждой степени подвижности.
4. Указать способы регулирования скорости каждой степени подвижности.
Техника безопасности
Лабораторная работа выполняется только с разрешения преподавателя и в его присутствии.
Перед началом работы необходимо:
- убедиться, что манипулятор, система управления и компрессор отключены от электропитания;
- проверить шины заземления и их подключение к лабораторному стенду;
- проверить, нет ли наружных повреждений кабелей электропроводки и шлангов пневмопитания;
- убрать все посторонние предметы из рабочей зоны робота и проверить её ограждение;
- занять рабочие места вне рабочей зоны робота.
Если при эксплуатации робота появились визуально регистрируемые неисправности, необходимо его немедленно отключить и сообщить об этом преподавателю или лаборанту.
После завершения работ лабораторный стенд (манипулятор, система управления, компрессор) предъявляется для проверки преподавателю или лаборанту и затем выключается. Все органы управления должны находиться в исходном положении.
Студентам запрещается:
- самостоятельно устранять неисправности;
- самостоятельно открывать корпуса устройств;
- класть посторонние предметы на рабочие места;
- включать и выключать устройства, не относящиеся к выполняемому заданию;
- оставлять без надзора включённые установки.
Список литературы
1. Промышленные роботы и их применение. - М. Машиностроение, 1983.
2. Робототехника и гибкие автоматизированные производства. В 9-ти кн. Кн. 9. Лабораторный практикум по робототехнике: Учеб. пособие для втузов /, , и др.; Под ред. .-М.: Высш. шк., 1986.-176 с.: ил.
План 2003
Составитель
Евгений Анатольевич Новиков
ПРОМЫШЛЕННЫЙ РОБОТ МП-9С
Методические указания к проведению
практических занятий по дисциплине
"Автоматизация, робототехника и ГПС кузнечно-штамповочного производства"
для студентов специальности
"Машины и технология обработки металлов давлением"
(120400)
Напечатано в полном соответствии с авторским оригиналом
Изд. лиц. № Подписано в печать
Формат бумаги 60*84 1/16. Бумага писчая. Ризограф.
Усл. печ. л. Уч.-изд. л. Тираж 25 экз. Заказ
Сибирский государственный индустриальный университет,
654007, Новокузнецк, Издательский центр СибГИУ.
