

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В третьем разделе рассматриваются вопросы моделирования движения лесовозного автопоезда, носящего неравномерный характер вследствие чередования элементов продольного профиля и плана дороги, ограничений скорости движения, изменения тягового усилия с изменением скорости, изменения величин сопротивления качению и сопротивления от воздушной среды с изменением скорости и других факторов. Дифференциальное уравнение движения лесовозного автопоезда, как известно, можно представить в следующем виде:
![]() , (1)
, (1)
где ![]() – основное сопротивление движению, Н/Н; i – продольный уклон, Н/Н; G – вес автопоезда, Н;
– основное сопротивление движению, Н/Н; i – продольный уклон, Н/Н; G – вес автопоезда, Н; ![]() – постоянная для определенного типа подвижного тягового состава величина, определяемая экспериментально, Н·м/Н;
– постоянная для определенного типа подвижного тягового состава величина, определяемая экспериментально, Н·м/Н; ![]() – радиус горизонтальной кривой, м;
– радиус горизонтальной кривой, м; ![]() – коэффициент учета инерции вращающихся масс; k – приведенный коэффициент сопротивления воздушной среды, Н·с2/м2;
– коэффициент учета инерции вращающихся масс; k – приведенный коэффициент сопротивления воздушной среды, Н·с2/м2; ![]() – лобовая площадь автопоезда, м2;
– лобовая площадь автопоезда, м2; ![]() – коэффициент, учитывающий дополнительное сопротивление воздушной среды от прицепов; S – пройденный путь от начала вертикальной кривой, м;
– коэффициент, учитывающий дополнительное сопротивление воздушной среды от прицепов; S – пройденный путь от начала вертикальной кривой, м; ![]() – радиус вертикальной кривой, м.
– радиус вертикальной кривой, м.
Доказано, что с достаточной точностью аппроксимация тяговой характеристики автомобиля с механической трансмиссией во всем диапазоне оборотов двигателя достигается зависимостями ![]() .
.
Определены зависимости указанных видов для основных типов лесовозных автопоездов. Основное сопротивление движению ![]() возрастает с изменением скорости движения
возрастает с изменением скорости движения ![]() Обозначив
Обозначив ![]() ,
, ![]() ,
, ![]() ;
; ![]() .
.
![]() . (2)
. (2)
![]() . (3)
. (3)
В зависимостях (2-3) знаки в верхней строке принимаются при аппроксимации кривой тяговой характеристики в диапазоне скоростей от минимально допустимой до соответствующей максимальному крутящему моменту, знаки в нижней строке – в диапазоне скоростей от соответствующей максимальному крутящему моменту до максимальной мощности. В формулах (2-3) для выпуклых вертикальных кривых радиус принимается со знаком «+», для вогнутых – со знаком «-». При расчете скорости движения на прямолинейных в профиле участках дороги расчетные зависимости упрощаются, так как при ![]() в расчетных зависимостях упраздняются члены, включающие радиус горизонтальной кривой.
в расчетных зависимостях упраздняются члены, включающие радиус горизонтальной кривой.
Для определения времени и скорости движения при тех же предпосылках, при которых выведена формула (1), получены следующие зависимости:
При А и В, имеющих различные знаки
![]() , (4)
, (4)
![]() ,
, ![]() . (5)
. (5)
При А и В, имеющих одинаковые знаки
![]() , (6)
, (6)
![]() ,
, ![]() . (7)
. (7)
На участках вертикальных кривых в связи с непрерывным изменением уклона изменяется суммарное сопротивление движению, при этом на выпуклых вертикальных кривых сопротивление непрерывно уменьшается, а на вогнутых возрастает. В связи с этим на выпуклых вертикальных кривых скорость движения снизившись до определенной величины, может начать возрастать, а на вогнутой, возрастая, достигнув максимального значения, может начать снижаться.
Для условий движения на вертикальной выпуклой кривой расстояние до точки экстремума скорости
![]() . (8)
. (8)
В зависимости (8) ![]() .
.
Для определения скорости движения на любом расстоянии от точки экстремума используется зависимость
![]() . (9)
. (9)
В работе доказано, что значения ![]() , определяемые по формуле (3) или берущиеся из таблиц
, определяемые по формуле (3) или берущиеся из таблиц ![]() с достаточной для практических расчетов точностью аппроксимируется зависимостью
с достаточной для практических расчетов точностью аппроксимируется зависимостью
![]() . (10)
. (10)
С использованием зависимости (10) можно определить расстояние ![]() , пройденное автопоездом от точки экстремума до достижения автопоездом заданной скорости
, пройденное автопоездом от точки экстремума до достижения автопоездом заданной скорости ![]() без использования таблиц. Для этого по формуле (9) определяется величина
без использования таблиц. Для этого по формуле (9) определяется величина ![]() . Искомое расстояние определяется по формуле
. Искомое расстояние определяется по формуле ![]() .
.
По общепринятой методике ограничения скорости по условиям видимости рассчитываются без учета влияния вертикальных кривых на показатели движения лесовозного автопоезда, которое может быть очень значительно, а также условно принимается, что торможение производится только колесными тормозами, тогда как снижение скорости производится, как правило, совместным торможением двигателем или моторным тормозом и колесными тормозами.
Исходя из зависимости (1) при ![]() , получаем
, получаем
![]() , (11)
, (11)
где ![]() – расстояние видимости, м;
– расстояние видимости, м; ![]() – расстояние от места остановки автопоезда до препятствия на дороге, м.
– расстояние от места остановки автопоезда до препятствия на дороге, м.
![]() , (12)
, (12)
где ![]() – коэффициент сцепления;
– коэффициент сцепления; ![]() – коэффициент, учитывающий неполноту и несвоевременность торможения.
– коэффициент, учитывающий неполноту и несвоевременность торможения.
Выведены и приведены в работе также расчетные зависимости для определения расстояния на прямолинейных в профиле участках и на участках вертикальных кривых до точки, начиная с которой автопоезд должен начинать торможение двигателем или моторным тормозом с тем, чтобы не превысить допускаемую скорость в начале следующего участка.
Для автомобилей с гидромеханической трансмиссией получены расчетные зависимости для определения показателей движения при условии аппроксимации кривых тяговых характеристик гиперболическими зависимостями первой и второй степени. Для облегчения и ускорения вычислений с использованием сложных зависимостей разработан табличный метод расчета; в работе приведены соответствующие таблицы.
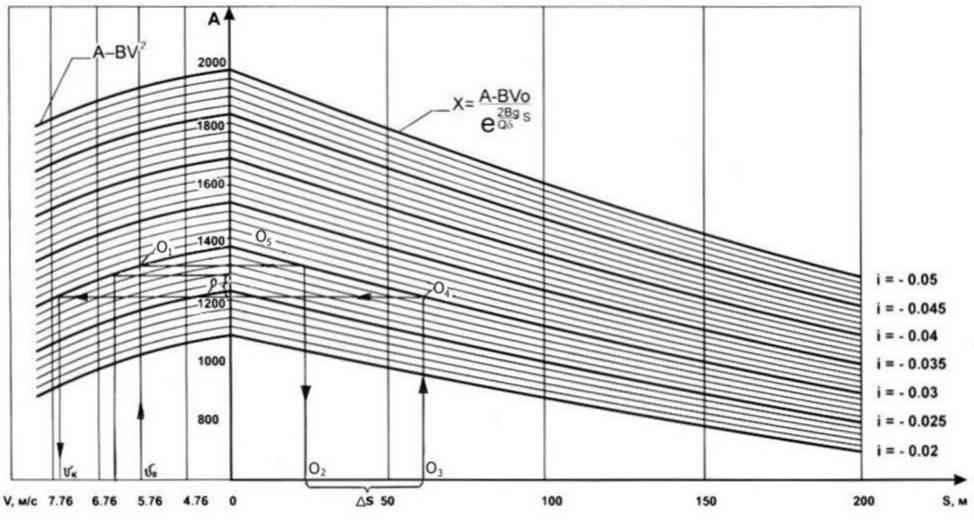
Для ускорения расчетов по определению показателей движения лесовозных автопоездов разработан номографический способ расчетов.
Для построения номограммы (рис. 1) используется уравнение (1) в виде:
![]() . (13)
. (13)
Для прямолинейных в профиле участков (при ![]() ) с использованием номограмм можно определить скорость
) с использованием номограмм можно определить скорость ![]() в конце участка длиной S, исходя из начальной скорости
в конце участка длиной S, исходя из начальной скорости ![]() , или расстояние, которое пройдет автопоезд при изменении скорости от
, или расстояние, которое пройдет автопоезд при изменении скорости от ![]() до
до ![]() . При определении показателей движения на вертикальных кривых решаются те же задачи, но для определения
. При определении показателей движения на вертикальных кривых решаются те же задачи, но для определения ![]() используется дополнительная номограмма
используется дополнительная номограмма ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
