

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АЛГОРИТМ ПЕРЕОРИЕНТАЦИИ НАНОСПУТНИКА ФОРМАТА CUBESAT
1, 2,
Самарский национальный исследовательский университетимени академика ,
Самара, Россия, e-mail: *****@***ru
Аннотация
Ключевые слова: наноспутник, переориентация, обратная задача динамики,
программная траектория, алгоритм
В настоящее время, среди наноспутников наиболее популярными являются наноспутники формата CubeSat. Наноспутники формата CubeSat могут применяться для различных целей, например, проведение экспериментов по изучению геофизических полей, для дистанционного зондирования Земли с невысоким/средним разрешением и т. д.Важную роль при решении целевых задач на орбите выполняет система управления ориентацией. Она позволяет переориентировать наноспутник из произвольного начального положения в требуемое конечное за заданный промежуток времени. В работе представлен алгоритм переориентации наноспутника формата CubeSat, основанный на принципе решения обратных задач динамики с учетом действия аэродинамического и гравитационного моментов, в качестве программной траектории выбран многочлен пятой степени. Приведено сравнение величин модуля управляющего момента для различной длительности процесса разворота, рассмотрено влияние погрешности определения ориентации на точность процесса переориентации, а также влияние не учета факторов движения (не учет аэродинамического момента) на точность процесса переориентации при высотах орбиты, характерных для типовых миссий наноспутников (300-450 км).
Введение
Во всем мире среди космических аппаратов, функционирующих в настоящее время, значительный интерес вызывают малые и сверхмалые космические аппараты (КА). Это связано, как с возможностью снизить стоимость КА при сохранении эффективности выполнения миссии за счет уменьшения массо-инерционных характеристик аппаратного состава КА, так и с перспективами применения орбитальных группировок таких аппаратов, выводимых на орбиту одним носителем. С учетом современного уровня аэрокосмических технологий, особое внимание со стороны научно-технического сообщества уделяется аппаратам с массой от 1 до 10 кг –наноспутникам. Они могут применяться для различных целей, например, для исследования воздействия радиации на элементную базу, тестирование новых приборов в условиях космического пространства, дистанционное зондирование Земли с невысоким/средним разрешением, мониторинга геофизических полей и т. д.
Для большинства из перечисленных задачтребуется решить задачу переориентации наноспутника. Задача переориентации решается системой управления ориентацией, которая позволяет переориентировать наноспутник из произвольного начального положения в требуемое конечное положение за заданный промежуток времени. Усложнение экспериментов проводимых с использованием наноспутников приводит к необходимости разработки алгоритмов переориентации для обеспечения требуемого углового положения.
В работе представлен алгоритм переориентации наноспутника формата CubeSat [1], основанный на принципе решения обратных задачи динамики [2], обоснован выбор программной траектории для осуществления поворота наноспутника, приведены и проанализированы результаты математического моделирования процесса переориентации.
Математическая постановка задачи переориентации наноспутника
Взаимное расположение орбитальной и связанной системы координат можно описать кватернионом [3]:
![]() ,
,
компоненты которого должны удовлетворять условию нормировки:
![]() . (1)
. (1)
Для описания движения относительно центра масс используются динамические и кинематические уравнения [3]:
| (2) |
| (3) |
где ![]() – абсолютная угловая скорость,
– абсолютная угловая скорость, ![]() – вектор кинетического момента,
– вектор кинетического момента, ![]() – тензор инерции,
– тензор инерции, ![]() – главный момент внешних сил,
– главный момент внешних сил, ![]() – вектор управляющего момента;
– вектор управляющего момента;![]() – орбитальная угловая скорость.
– орбитальная угловая скорость.
При орбитальном полёте наноспутника на заданной орбите основное влияние на него оказывают гравитационныйи аэродинамическийвозмущающие моменты[4]. Следует учитывать, что для высот орбиты, характерных для типовых миссий наноспутников, (300-450 км), влияние аэродинамического момента значительнее, чем гравитационного [5].
Алгоритм переориентации наноспутника
Начальное и конечное состояния системы и значения управлений в них для любой кинематической траектории определяют на концах отрезка ![]() значения функции
значения функции ![]() и их первых и вторых производных [6]:
и их первых и вторых производных [6]:
![]() ,
,
![]() .
.
При![]() аналогично находим, что
аналогично находим, что
![]() ,
,
![]() .
.
Так как имеются 6 граничных условий, то для реализации кинематической траектории должен быть использован многочлен не ниже пятой степени [6]:
|
Кинематическая траектория удовлетворяет условию нормировки (1) и имеет вид [6]:
|
где ![]() .
.
Из уравнений (2) и (3) было выведено аналитическое уравнение управляющего момента:
|

Результаты математического моделирования
Рассмотрен случай пространственного разворота из произвольного начального положения ![]() ,
, ![]() ,
, ![]() в требуемое конечное положение
в требуемое конечное положение ![]() ,
, ![]() ,
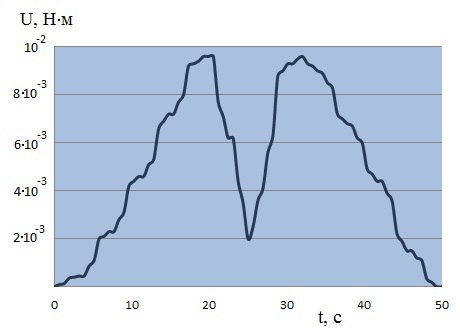
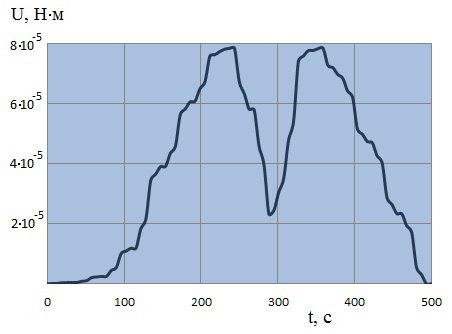
, ![]() . Был проведен анализ влияния времени разворота на мод и 5000 секунд (рисунок 1 а-в).
. Был проведен анализ влияния времени разворота на мод и 5000 секунд (рисунок 1 а-в).
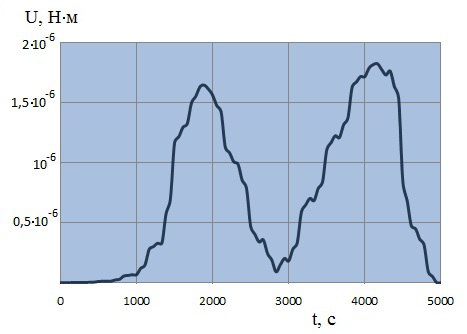
![]()
Как видно из рисунка 1, мод и 5000 секунд не превышают ![]() ,
, ![]() ,
, ![]() соответственно.
соответственно.
Погрешность управления ориентацией также зависит от погрешности определения начальных условий движения относительно центра масс. На рисунке 2 показана зависимость погрешности управления (по пространственному углу атаки) от погрешностей начальных данных.
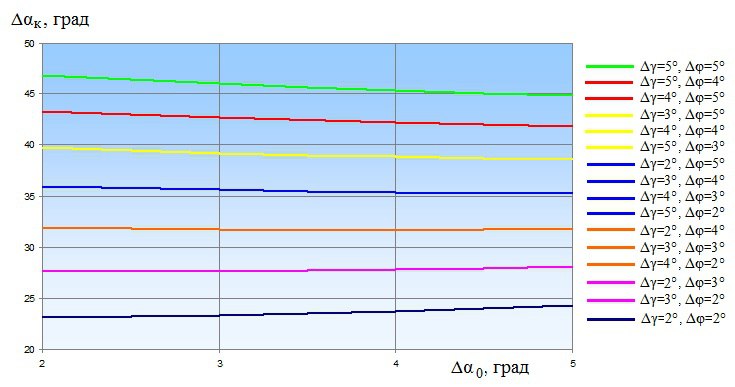
Рисунок 2 – Зависимость ошибки по углу атаки при пространственном развороте от погрешности системы определения ориентации
Как видно из рисунка 2, представленный алгоритм переориентации наноспутника накладывает жёсткие требования на точность определения ориентации наноспутника..
При построении управления на длительном времени, надо учитывать внешние моменты, действующие на наноспутник. Если не учитывать внешние моменты, действующие на наноспутник, то наноспутник выйдет в требуемое конечное положение с ошибкой.
Рассмотрим управление, построенное без учета аэродинамического момента. При численном моделировании движения относительно центра масс аэродинамический момент учитывается. Был рассмотрен пространственный случай разворота из произвольного начального положения ![]() ,
, ![]() ,
, ![]() , в требуемое конечное положение
, в требуемое конечное положение ![]() ,
, ![]() ,
, ![]() при действии управляющего момента без учета аэродинамического момента (рисунок 3).
при действии управляющего момента без учета аэродинамического момента (рисунок 3).
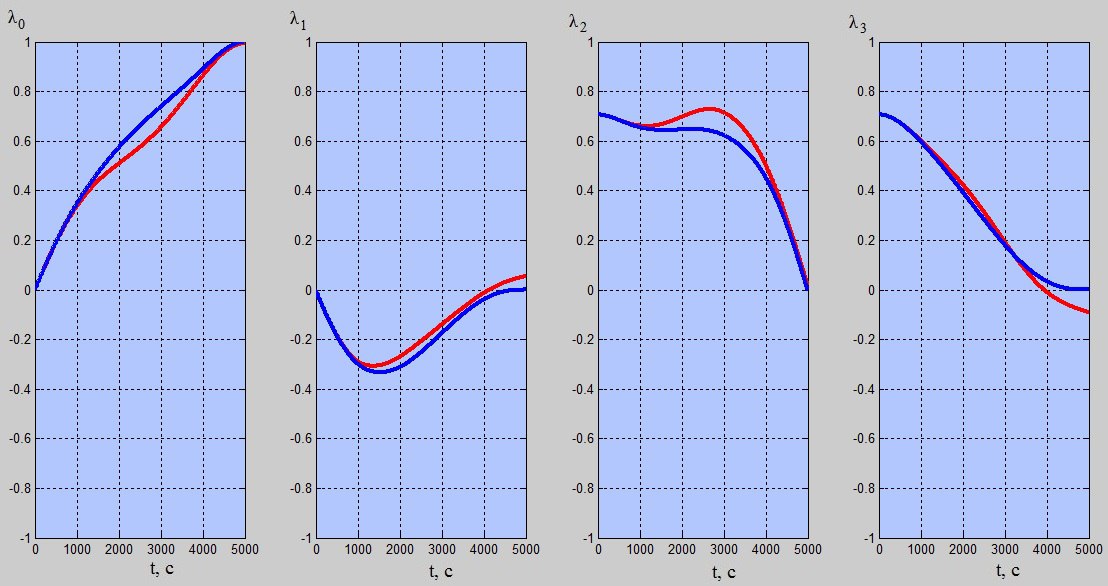
Рисунок 3 – Разворот из одного горизонтального положения в другое горизонтальное положение без учета аэродинамического момента при реализации управления
Как видно из графиков на рисунке 3 аэродинамический момент на высотах, характерных для типовых миссий наноспутников, оказывает значительное влияние на движение относительно центра масс.
Заключение
В результате работы разработан алгоритм переориентации с учетом действия аэродинамического и гравитационного моментов на основе принципа решения обратной задачи динамики. Проведено исследование алгоритма с помощью математического моделирования. Осуществлено сравнение величин модуля управляющего момента для различной длительности процесса разворота, рассмотрено влияние погрешности определения ориентации на точность процесса переориентации, а также влияние не учета факторов движения на точность процесса разворота.
В перспективе полученный алгоритм будет использоваться для переориентации наноспутников семейства SamSat, разрабатываемых в Самарском университете.
Литература
Shakhmatov, E., Belokonov, I., Timbai, I., Ustiugov, E., Nikitin, A., Shafran, S., SSAU Project of the Nanosatellite SamSat-QB50 for Monitoring the Earth's Thermosphere Parameters, Procedia Engineering, 2015, vol. 104, pp. 139-146. Крутько, задачи динамики управляемых систем: Линейные модели. М.: Наука, 1987. 304 с. Бранец, В. Н., Шмыглевский, кватернионов в задачах ориентации твердого тела. М.: Наука, 1973. 320 c. Белецкий, искусственного спутника относительно центра масс. М.: Наука, 1965. 416 с. Belokonov, I. V., Kramlikh, A. V., Timbai, I. A., Low-orbital Transformable Nanosatellite: Research of the Dynamics and Possibilities of Navigational and Communication Problems Solving for Passive Aerodynamic Stabilization, Proceedings of 2th IAA Conference on Dynamics and Control of Space System, Roma, Italy, 2014, IAA-AAS-DyCoSS2-14-04-10. Ermoshina, O. V., Krishchenko, A. P., Synthesis of Programmed Controls of Spacecraft Orientation by the Method of Inverse Problem of Dynamics, Journal of Computer and Systems Sciences International, 2000, no. 39(2), pp. 313-320.1Кандидат технических наук, доцент, доцент межвузовской кафедры космических исследованийСамарского университета.
2Аспирант межвузовской кафедры космических исследований Самарского университета.
