

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АЛГОРИТМ ОТНОСИТЕЛЬНОЙ ОРИЕНТАЦИИ БЛИЗКОЛЕТЯЩИХ НАНОСПУТНИКОВ ПРИ ГРУППОВОМ ПОЛЁТЕ НА ОСНОВЕ ДАЛЬНОМЕРНОГО РАДИОНАВИГАЦИОННОГО МЕТОДА
1, 2
Самарский университет, Самара, Россия, e-mail: a. *****@***com
Аннотация
Ключевые слова: наноспутник, групповой полёт, относительная ориентация
В работе исследуется возможность обеспечения определения относительной ориентации двух близколетящих наноспутников с помощью специализированной системы, использующей многочастотное приёмопередающее устройство. Решение поставленной задачи позволит управлять движением наноспутников относительно центра масс при их групповом полёте. Для определения взаимной ориентации был разработан алгоритм, основанный на методе дальномерной радионавигации. В работе формируется задача определения относительной ориентации и приводится анализ частного случая движения наноспутников в плоскости одной орбиты. Исследуется влияние погрешности измерения дальности и расстояния от центра масс до фазовых центров антенн наноспутника на решение задачи относительной ориентации. Получено аналитическое выражение для угла поворота связанной системы координат одного наноспутника относительно связанной системы координат другого в случае движения в одной плоскости. Оценена априорная погрешность данного подхода и сформулированы рекомендации по его практическому использованию.
Введение
В настоящее время многие отечественные и зарубежные, инновационные компании и университеты активно занимаются разработкой и созданием малоразмерных космических аппаратов и наноспутников (НС) стандарта CubeSat. Так в 2017 году анонсирован запуск 600 НС [1]. Популярность таких аппаратов возросла благодаря тому, что их создание не требует значительных финансовых затрат, однако позволяет провести лётные испытания элементов бортовых систем и новых технических решений в условиях космического пространства прежде, чем применять их в дорогостоящих космических миссиях.
Запуск нескольких НС, совместно выполняющих целевую задачу, значительно расширяет область их применения. Существует довольно большое количество проектов, когда главная особенность НС – их малые размеры – не позволяют разместить на борту одного аппарата весь спектр необходимой аппаратуры. Выходом из такой ситуации является создание группировки из нескольких близколетящих НС, совместно решающих поставленную задачу. Проекты, предполагающие вывод больших группировок НС, вплотную приблизились к возможности их практической реализации.
В большинстве задач необходимо обеспечение заданной полётной конфигурации группы НС, что предъявляет повышенные требования к точному определению не только относительного положения, но и определение относительной взаимной угловой ориентации НС. К таким проектам можно отнести: проект создания орбитальной фазированной антенной решетки, узлами которой являются НС; проект группировки близко летящих НС для исследования ионосферы Земли; проект орбитальной стыковки двух и более НС.
Существует ряд условий, необходимых для создания подобного рода группировок НС: обеспечение межспутниковой связи, что позволяет упростить решение задачи относительной ориентации НС и обеспечивает увеличение количества сеансов связи между Землей и группировкой НС; наличие активной системы управления, необходимой для поддержания заданной полётной конфигурации группировки НС в процессе движения по околоземной орбите.
В существующих работах определение относительной ориентации космических аппаратов базируется на обработке видеоизображений, получаемых при съёмке одного аппарата с помощью видеокамеры, установленной на другом аппарате [2], либо на косвенных измерениях по вычисленным расстояниям на основе данных спутниковых радионавигационных систем ГЛОНАСС/GPS [3,4]. В данной работе предлагается автономный способ определения углов взаимной ориентации по измерениям дальностей между фазовыми центрами антенн, расположенных на обоих НС и излучающих сигнал на определённой частоте. По измеренным дальностям алгоритм относительной ориентации НС, находит взаимное угловое положение двух НС.
Формулировка задачи определения относительной ориентации
Для обеспечения заданной полётной конфигурации группировок НС, необходимо определить относительные ориентацию и навигацию. Относительная навигация определяется с помощью известных математических моделей, обработки видеоизображения и с использованием спутниковых навигационных систем. В данной работе решение задачи относительной навигации не рассматривается и считается известным. В задачах определения относительной ориентации, основанных на дальномерных методах радионавигации, важную роль играет точное измерение дальности между фазовыми центрами антенн, расположенных на НС. В связи с относительно малым расстоянием между НС, задержки в приёме прямого и переотраженного сигналов могут быть малы, как следствие многочастотное приёмопередающее устройство должно обладать высокой разрешающей способностью по времени прихода сигнала, а также высокой точностью измерения дальности.
При использовании дальномерного метода определение местоположения объекта строится на измерении дальностей до опорных точек (фазовых центров антенн) с заранее известными координатами. Для определения местоположения объекта в пространстве таких опорных точек должно быть не менее шести, а в зоне видимости не менее трёх [5]. В существующих системах, использующих дальномерные методы, запросный сигнал, как правило, излучается поочерёдно на каждую опорную точку. Использование нескольких частот позволит передавать запрос на все опорные точки одновременно. Это позволит определять ориентацию объекта относительно опорных точек за один цикл измерений.
Рассмотрим два близколетящих НС, которые имеют в составе бортовой аппаратуры многочастотные приёмопередающие устройства, имеющие возможность измерять временную задержку ответа на запросы друг друга на соответствующей частоте. По измерениям временной задержки рассчитывается расстояние между фазовыми центрами антенн, работающих на одной частоте. Для решения задачи относительной ориентации примем следующие допущения:
- поскольку все измерения системы относительной ориентации связываются с положением ведущего НС группировки, будем считать, что ведущий НС стабилизирован по трём осям – оси орбитальной системы координат совпадают с осями ССК ведущего НС;
- НС движутся в плоскости одной орбиты и находятся на расстоянии, при котором поворот орбитальной системы координат составляет не более 0,1°, что позволяет считать орбитальную систему координат неизменной для обоих НС, на высоте 500 км данное расстояние соответствует 12 км;
- НС является прозрачным телом, поэтому для решения задачи относительной ориентации достаточно трёх опорных точек;
- опорные точки для каждого из частотных каналов расположены так, что их фазовые центры находятся на каждой из осей связанной системы координат (ССК) в точках, удалённых от центра ССК на расстояние l.
Расположение опорных точек при принятых допущениях показано на рисунке 1

Рисунок 1 – Расположение опорных точек при стабилизированном полёте ведущего НС
Решение задачи относительной ориентации будем искать в ССК ведущего НС группировки. Тогда координаты фазовых центров антенн ведущего НС в ССК принимают следующий вид:

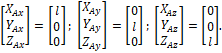 (1)
(1)
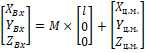
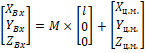
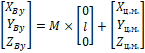
Запишем уравнения координат фазовых центров антенн ведомого НС в ССК ведущего НС, которые принимают вид:
 ;
; 
 ;
; 
 ; (2)
; (2)
где M – матрица перехода из ССК ведущего НС группировки в ССК ведомого НС, которая имеет вид:
![]()
![]() (3)
(3)
где ![]()
![]() – углы относительной ориентации, представленные на рисунке 2 (углы поворота ССК ведомого НС относительно ССК ведущего НС, которые являются решением задачи относительной ориентации).
– углы относительной ориентации, представленные на рисунке 2 (углы поворота ССК ведомого НС относительно ССК ведущего НС, которые являются решением задачи относительной ориентации).

Рисунок 2 – Углы относительной ориентации
Запишем уравнения измерений дальностей между фазовыми центрами антенн, расположенных на НС, в ССК координат ведущего НС:

 (4)
(4)
Подставив значения координат фазовых центров антенн ведущего НС (1) и уравнения координат фазовых центров антенн ведомого НС (2), а также заменим расчётные значения дальностей ![]()
![]() на значения
на значения ![]()
![]() , полученные многочастотным приёмопередающим устройством. В результате получим систему уравнений, решением которой являются углы ориентации
, полученные многочастотным приёмопередающим устройством. В результате получим систему уравнений, решением которой являются углы ориентации ![]()
![]() .
.
Решение задачи определения относительной ориентации двух НС можно разделить на несколько этапов. На первом этапе определяются дальности между фазовыми центрами антенн двух НС. Затем определяются параметры относительного движения центра масс ведомого НС относительно ведущего. После этого происходит определение относительной ориентации ведомого НС по отношению к ведущему, которое сводится к численному решению системы нелинейных уравнений (4).
Анализ частного случая плоского движения двух НС
Рассмотрим частный случай относительного движения двух НС, летящих в плоскости одной орбиты на небольшом удалении друг от друга. Для решения задачи ориентации в плоском случае движения используем два канала, работающих каждый на своей частоте. Поместим опорные точки для каждого из частотных каналов так, чтобы их фазовые центры находились на каждой из осей ССК в точках, удалённых от центра ССК на расстояние l. Уравнения определения дальностей в ССК ведущего НС в плоском случае движения примут вид:
![]()
![]() (5)
(5)
Координаты фазовых центров антенн ведомого и ведущего НС запишутся аналогично (1) и (2). А матрица перехода от ССК ведущего НС к ССК ведомого НС в плоском случае движения принимает вид:
![]()
![]() (6)
(6)
Подставив координаты фазовых центров антенн ведущего и ведомого НС, получим уравнения определения дальностей от угла относительной ориентации α (угол поворота ССК ведомого НС относительно ССК ведущего). Заменив расчётные значения дальностей ![]()
![]() на значения
на значения ![]()
![]() , полученные дальномером, получим систему уравнений, решением которой будет cos(α) и sin(α), что позволяет однозначно определить угол относительной ориентации α, что и является решением задачи относительной ориентации двух близколетящих НС в плоском случае. После преобразований (5) получим аналитическое выражение для нахождения угла относительной ориентации α:
, полученные дальномером, получим систему уравнений, решением которой будет cos(α) и sin(α), что позволяет однозначно определить угол относительной ориентации α, что и является решением задачи относительной ориентации двух близколетящих НС в плоском случае. После преобразований (5) получим аналитическое выражение для нахождения угла относительной ориентации α:
![]()
![]() (7)
(7)
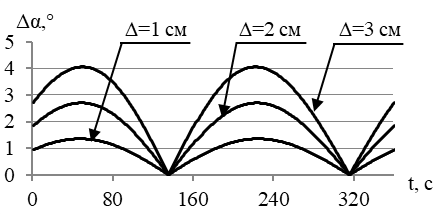
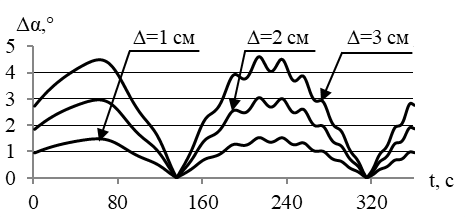
Моделирование работы алгоритма определения относительной ориентации двух НС в плоском случае движения, проводилось в двух случаях. Первый «статический» (рис. 3А и 3В), когда положение центра масс ведомого НС относительно центра масс ведущего не изменяется, изменяется только относительная ориентация. Статический случай возможен при наличии активной системы управления у ведомого НС, когда необходимо поддержание постоянного расстояния между центрами масс ведомого и ведущего НС. Второй – «динамический» (рис. 3Б и 3Г). В этом случае положение центра масс ведомого НС изменяется с относительной скоростью 1 м/с, а также изменяется относительная ориентация. В обоих случаях, угол б изменяется от 0° до 360° с шагом в 1°. Исследуется влияние расстояния от центра масс до фазовых центров антенн, при l=0,3 м (рис. 3А и 3Б) и l=0,6 м (рис. 3В и 3Г).
А) |
|
|
Г) |
 Б)
Б)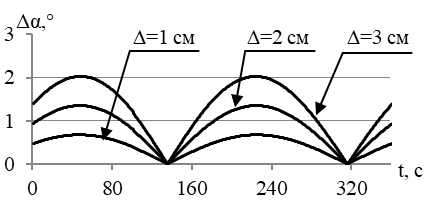 В)
В)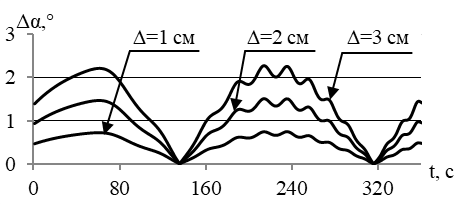
Рисунок 3 – Оценка погрешности определения угла относительной ориентации б
где Дб – погрешность определения угла относительной ориентации б; Д – ошибка измерения дальности между фазовыми центрами антенн двух НС.
Заключение
В работе исследована возможность решения задачи относительной ориентации при групповом полёте двух НС на базе многочастотного приёмопередающего устройства. Проанализирован частный случай плоского движения, для которого получено аналитическое выражение для угла относительной ориентации б. Исследовано влияние расстояния от цента масс НС до фазовых центров антенн на решение задачи относительной ориентации. По выполненному моделированию сформулированы требования для автономной системы определения относительной ориентации:
- необходимо обеспечить высокую точность измерения дальности между фазовыми центрами антенн НС, для решения задачи относительной ориентации с погрешностью не более 5°, ошибка измерения дальности должна быть не более 3 см;
- необходимо расположить фазовые центры антенн от центра масс НС на максимально возможном расстоянии, что существенно уменьшит погрешность решения задачи относительной ориентации.
Литература
База данных о наноспутниках [Электронный ресурс] статистика запущенных и анонсированных наноспутников: веб сайт 2017. URL: http://www. nanosats. eu (Дата обращения: 17.02.2017). Определение относительного движения спутников при их разделении по результатам обработки видеоизображения [Текст]/, , - Препринты ИПМ им. 2012 №57 24 с. Belokonov, I. V., Kramlikh, A. V., Soboda, S. A., Problems of navigation support of research experiments in space on an example of mission of spacecraft "FOTON - M2",14th Saint Petersburg International Conference on Integrated Navigation Systems, ICINS 2007 – Proceedings, 2007, Pages 342-343 Belokonov, I. V., Kramlikh, A. V., Small satellite attitude determination using navigational receiver and magnetometer, 60th International Astronautical Congress 2009, IAC 2009, Volume 6, 2009, Pages 4800-4807 Барабанов, О. О., Барабанова, Л. П., Математические задачи дальномерной навигации. - М.: ФИЗМАТЛИТ, 2007. - C.123.
1 Аспирант межвузовской кафедры космических исследований, лаборант-исследователь НИЧ-90.
2 Студент межвузовской кафедры космических исследований.
