
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 534.134
А. В. ЛУКИН, И. А. ПОПОВ, Д. Ю. СКУБОВ
Санкт-Петербургский политехнический университет Петра Великого, Институт прикладной математики и механики, кафедра «Механика и процессы управления»
нелинейная динамика и устойчивость элементов микросистемной техники
В работе исследуются аналитические и численные методы решения нелинейных задач статики и динамики упругих элементов нано - и микросистемной техники. Для базовых чувствительных и исполнительных элементов микросистемной техники (мембран, пластин) определяются формы равновесия, их устойчивость и бифуркации во внешнем электростатическом поле; строятся диаграммы ветвления в зависимости от характерных физических параметров; рассматриваются связанные динамические задачи в переменных электрических полях.
Введение
Широкое применение нано - и микросистемной техники (НМСТ) в современном приборостроении связано с высокой чувствительностью данных систем к нано - и микро-масштабным изменениям физических (давление, ускорение, температура, длина волны, интенсивность магнитного поля, напряжение), химических и биологических параметров (состав и концентрация вещества, скорость реакции) [3]. Причиной этому является определяющее влияние совместного действия физических полей различной природы (механического, температурного, электромагнитного) на состояние элементов НМСТ. В связи с масштабным фактором, внутренняя связанность, междисциплинарность задачи анализа динамики и прочности элементов НМСТ приводит к необходимости исследования существенно нелинейных эффектов, вызванных совместным действием указанных физических полей.
Предлагаемый доклад посвящен разработке и исследованию аналитических и численных методов решения нелинейных задач статики и динамики упругих элементов НМСТ – мембран и пластин, действующих в электрических полях различных конфигураций. Рассматриваемые методы и математические постановки могут быть использованы при проектировании микромеханических акселерометров и гироскопов [7], микродатчиков давления [19], микронасосов [16], ультразвуковых преобразователей [13], радиочастотных переключателей [14,17], элементов оптических и телекоммуникационных систем(линзы, диафрагмы, оптические переключатели, микрозеркала и дифракционные решетки) [16], систем автономного энергоснабжения [8], а также биомедицинских приборов (биосенсоры, детекторы массы прилипающей частицы, системы направленного транспорта лекарственных веществ в организме) [9,20].
Статическая устойчивость упругих элементов НМСТ
Модель микроэлектромеханического осциллятора с одной степенью свободы. Рассмотрим модель микроэлектромеханического осциллятора, состоящую из массы на пружине с демпфером, прикрепленной к подвижной обкладке плоскопараллельного конденсатора. С учетом известного выражения для пондеромоторной силы, действующей на подвижную пластину конденсатора, уравнение движения примет вид
| (1) |
где ![]()
![]() – расстояние между неподвижной обкладкой и точкой крепления осциллятора,
– расстояние между неподвижной обкладкой и точкой крепления осциллятора, ![]()
![]() – масса подвижной пластины,
– масса подвижной пластины, ![]()
![]() – коэффициент диссипации,
– коэффициент диссипации, ![]()
![]() – жесткость пружины,
– жесткость пружины, ![]()
![]() – длина недеформированной пружины,
– длина недеформированной пружины, ![]()
![]() – относительная диэлектрическая проницаемость среды в пространстве между обкладками,
– относительная диэлектрическая проницаемость среды в пространстве между обкладками, ![]()
![]() – диэлектрическая проницаемость вакуума,
– диэлектрическая проницаемость вакуума, ![]()
![]() – площадь обкладки,
– площадь обкладки, ![]()
![]() – разность потенциалов между обкладками. Перейдя к безразмерным величинам
– разность потенциалов между обкладками. Перейдя к безразмерным величинам ![]()
![]() , преобразуем уравнение (1) к виду
, преобразуем уравнение (1) к виду
| (2) |
где ![]()
![]() – безразмерный параметр, определяющий соотношение между пондеромоторной и упругой силами, действующими на систему.
– безразмерный параметр, определяющий соотношение между пондеромоторной и упругой силами, действующими на систему.
В случае системы с двумя неподвижными электродами, когда подвижная обкладка конденсатора симметрично расположена на расстоянии ![]()
![]() от них, уравнение движения записывается в виде
от них, уравнение движения записывается в виде
| (3) |
где ![]()
![]() .
.
Анализ статической устойчивости систем (2), (3) состоит в определении числа и типа положений равновесия ![]()
![]() в зависимости от значений физического параметра
в зависимости от значений физического параметра ![]()
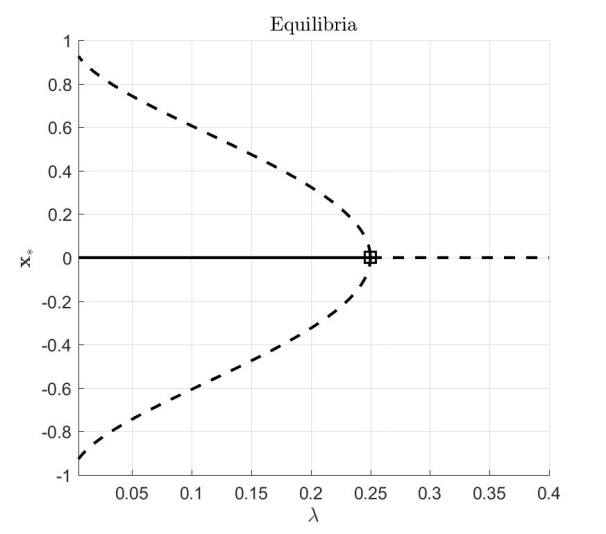
![]() . На рисунке 1 показаны вычисленные диаграммы ветвления положений равновесия. Сплошной линией на обозначены устойчивые решения, пунктирной – неустойчивые.
. На рисунке 1 показаны вычисленные диаграммы ветвления положений равновесия. Сплошной линией на обозначены устойчивые решения, пунктирной – неустойчивые.
|
|
а) система с одним электродом | б) система с двумя электродами |
Рисунок 1 – Диаграммы ветвления положений равновесия |

Как видно из рисунка 1,а, в системе с одним электродом при достижении ![]()
![]() некоторого критического значения
некоторого критического значения ![]()
![]() происходит бифуркация – слияние устойчивого (особая точка типа «центр») и неустойчивого (седло) положений равновесия с их последующим исчезновением. Бифуркационное значение
происходит бифуркация – слияние устойчивого (особая точка типа «центр») и неустойчивого (седло) положений равновесия с их последующим исчезновением. Бифуркационное значение ![]()
![]() находится из условия сложного экстремума – обращения в нуль первой и второй производных потенциальной функции
находится из условия сложного экстремума – обращения в нуль первой и второй производных потенциальной функции ![]()
![]() системы (1). В англоязычной литературе указанная бифуркация часто называется «static pull-in instability» в силу характерности именно для базовых элементов микроэлектромеханических систем, где она физически соответствует «схлопыванию» подвижного упругого элемента с неподвижным электродом [18].
системы (1). В англоязычной литературе указанная бифуркация часто называется «static pull-in instability» в силу характерности именно для базовых элементов микроэлектромеханических систем, где она физически соответствует «схлопыванию» подвижного упругого элемента с неподвижным электродом [18].
Согласно рисунку 1,б, в системе с двумя электродами при малых ![]()
![]() существуют три положения равновесия в геометрически допустимом интервале
существуют три положения равновесия в геометрически допустимом интервале ![]()
![]() : устойчивое нулевое (нейтральное) и два неустойчивых, симметричных относительно нуля с большими амплитудами (
: устойчивое нулевое (нейтральное) и два неустойчивых, симметричных относительно нуля с большими амплитудами (![]()
![]() ). При увеличении
). При увеличении ![]()
![]() боковые положения равновесия смещаются к нулю, и при некотором критическом значении
боковые положения равновесия смещаются к нулю, и при некотором критическом значении ![]()
![]() сливаются с нейтральным равновесием. При дальнейшем росте
сливаются с нейтральным равновесием. При дальнейшем росте ![]()
![]() в системе сохраняется единственное неустойчивое нулевое положение равновесия.
в системе сохраняется единственное неустойчивое нулевое положение равновесия.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
