
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() ,(20)
,(20)
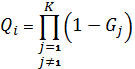
Эта зависимость показана на рисунке 10. Видим, что максимальная производительность равна ![]()
![]() пакетов на интервал, которая возникает при
пакетов на интервал, которая возникает при ![]()
![]() . Если
. Если ![]()
![]() , производительность S уменьшается. Вышеприведенное исследование показывает, что несинхронизированный или “чистый” метод доступа имеет относительно малую производительность и не эффективен.
, производительность S уменьшается. Вышеприведенное исследование показывает, что несинхронизированный или “чистый” метод доступа имеет относительно малую производительность и не эффективен.
Рисунок 10? Производительность в системе ALOHA
Тактированная ALOHA. Чтобы определить производительность в тактированной системе ALOHA, положим Gi - вероятность того, что i-й пользователь будет передавать пакет в некотором интервале. Если нет статистической зависимости между передачей пакетов пользователя в текущеминтервале и передачей пакета пользователя в предыдущий по времени интервал и все Kпользователей работают независимо, общий (нормализованный) трафик равен:

 ,(21)
,(21)
Обратим внимание, что в этом случае G может быть больше единицы.
Теперь, пусть ![]()
![]() , является вероятностью того, что пакет, переданный во временном интервале, принимается без столкновения. Тогда нормированная производительность канала равна:
, является вероятностью того, что пакет, переданный во временном интервале, принимается без столкновения. Тогда нормированная производительность канала равна:

 ,(22)
,(22)
Вероятность того, что пакет от i-го пользователя не будет иметь столкновения с другим пакетом, равна:
 ,(23)
,(23)
Следовательно:
![]()
![]() , (24)
, (24)
Простое выражение для производительности получается при рассмотренииK идентичных пользователей. Тогда:
![]()
![]() , (25)
, (25)
Далее, если предположим ![]() , мы получим производительность:
, мы получим производительность:
![]()
![]() ,(26)
,(26)
Этот результат также изображен на рисунке 10. Видим, что S достигает максимум производительности ![]()
![]() пакетов на интервал при G=1, что в два раза больше производительности“чистой” системы ALOHA.
пакетов на интервал при G=1, что в два раза больше производительности“чистой” системы ALOHA.
1.8 CSMA/CD
Суть данного метода заключается в том, что все пользователи прислушиваются к передачам по каналу. При обнаружении свободного канала, пользователь, желающий передавать пакет, занимает его. Могут возникнуть столкновения, если два или больше пользователей обнаруживают, что канал не занят и начинают передачу. Когда пользователи, которые передают одновременно, обнаруживают столкновение, они посылают специальный сигнал, называемый сигналом столкновения (jam), который служит для указания всем пользователям о столкновении, и прекращают свои передачи. И обнаружение несущей, и прекращения передач, когда возникает столкновение, ведут к минимизации времени занятия канала и, следовательно, дают большую производительность.
Для детальной разработки эффективности CSMA/CD рассмотрим локальную сеть в свободном пространстве, имеющую шинную (bus) структуру, показанную на рисунке 11.
Рассмотрим двух пользователей U1 и U2 с максимальным разделением, т. е. на двух концах трассы, и пусть ?d определяет время задержки сигнала при его распространении по длине трассы. Тогда, время (максимальное), требуемое для обнаружения незанятого канала равно ?d. Предположим, что U1 передает пакет длительностью Tp.
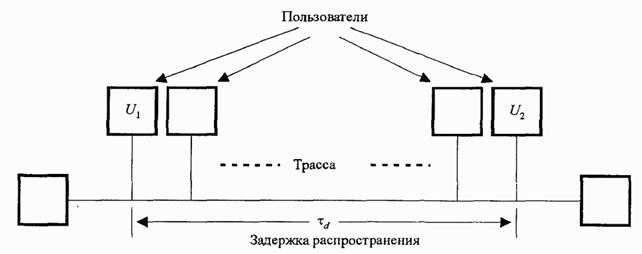
Рисунок 11 ? Локальная сеть в свободном пространстве с шинной архитектурой
Пользователь U2 может захватить канал на ?d позже, используя обнаружение несущей, и начинать передачу. Однако пользователь U1 не знает об этой передаче до момента ?d после начала передачи U2. Таким образом, мы можем определить интервал времени 2?d как временной интервал (максимальный) для обнаружения столкновения. Если мы предположим, что время, требуемое для передачи сигнала столкновения, пренебрежимо мало, то протокол CSMA/CD даст высокую производительность, когда 
 .
.
Имеется несколько возможных протоколов, которые можно использовать для повторения передач при возникновении столкновений. Один протокол называется ненастойчивый (nonpersistent) CSMA, другой называется 1-настойчивый CSMA, а обобщение последнего называется p-настойчивый CSMA.
Ненастойчивый CSMA. В этом протоколе пользователь, который имеет пакет для передачи, прослушивает канал и действует согласно следующему правилу:
a) Если канал не занят, пользователь передает пакет,
b) Если канал занят, пользователь переносит передачу пакета на более позднее время, согласно некоторому распределению задержек. На конце интервала задержки пользователь снова прослушивает канал и повторяет шаги а) и b).
1-настойчивый CSMA. Этот протокол применяется для достижения высокой производительности посредством того, что не допускает простоя канала, если несколько пользователей готовы передавать пакеты. Здесь пользователи отслеживают канал и работают согласно следующему правилу:
a) Если обнаружен незанятый канал, пользователь передает пакет с вероятностью 1;
b) Если канал занят, пользователь ждет, пока канал окажется незанятым и передает пакет с некоторой вероятностью.
Заметим, что в этом протоколе столкновение будет возникать, когда более одного пользователя имеют пакеты для передачи.
р-настойчивый CSMA. Чтобы сократить вероятность столкновений в 1-настойчивом CSMA и увеличить производительность, мы можем рандомизировать время начала передачи пакетов. В частности, отследив незанятость канала, пользователь, имеющий пакет для передачи, посылает его с вероятностью p или задерживает его на время ? с вероятностью 1-p. Вероятность p выбирается таким образом, чтобы сократить вероятность столкновений, в то время когда период незанятости между последовательными (неперекрывающимися) передачами сохраняется малым. Это выполняется путем деления оси времени на мини-интервалы длительностью ? и выбора начала передачи пакета в начале мини-интервала. В целом в p-настойчивом протоколе пользователь, имеющий пакет для передачи, поступает следующим образом:
a) Если канал свободен, пакет посылается с вероятностью p или с вероятностью (1-p) передача задерживается на ? секунд.
b) Если при t=? канал еще свободен, шаг а) повторяется. Если возникает столкновение, пользователи переносят ретрансляцию пакетов согласно некоторого выбранного до передачи распределения задержек.
c) Если при t=? канал занят, пользователи ждут, пока он окажется свободным и затем поступают согласно a) и b).
Можно также применятьтактированную версию описанного выше протокола.
Анализ производительности для протоколов ненастойчивой и p-настойчивой CSMA/CD был выполнено Клейнроком и Тобаджи (1975), основываясь на следующих предположениях:
1. Среднее время ретрансляции велико по сравнению с длительностью пакета ![]()
![]() .
.
2. Интервалы точечного процесса, определённые временем старта всех пакетов плюс времени ретрансляций, независимы и распределены экспоненциально.
Для ненастойчивого CSMA производительность равна:
![]()
![]() , (27)
, (27)
где параметр ![]()
![]() . Заметим, что когда
. Заметим, что когда ![]()
![]() ,
, ![]()
![]() . Рисунок 12 иллюстрирует зависимость производительности от предоставляемого трафика G с параметром?. Видим, что
. Рисунок 12 иллюстрирует зависимость производительности от предоставляемого трафика G с параметром?. Видим, что ![]()
![]() , когда
, когда ![]()
![]() для
для ![]()
![]() . Для
. Для ![]()
![]() величина Smax уменьшается.
величина Smax уменьшается.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
