
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Алгоритмы поиска шумоподобных меандровых сигналов по задержке
1, 1 (научный руководитель)
1Институт инженерной физики и радиоэлектроники СФУ
660074, Красноярск,
E-mail: *****@***ru
На текущий момент BOC-модуляция (binary offset carrie rmodulated signals) является неотъемлемой частью навигационных сигналов глобальных навигационных спутниковых систем GPS, Galileo. Также BOC-модуляция нашла своё применение в сигналах ГЛОНАСС с кодовым разделением в частотном диапазоне L1 и L2 [1].
BOC-модуляция формируется при наложении меандра на дальномерный код навигационного сигнала, что в свою очередь расширяет спектр сигнала относительно несущей частоты [2].
![]()
где ![]()
![]() - дальномерный кодс частотой следования символов
- дальномерный кодс частотой следования символов ![]()
![]() ,
,![]()
![]() - расширяющий меандр,
- расширяющий меандр, ![]()
![]() - частота меандра, кратная
- частота меандра, кратная ![]()
![]() .Для обозначения BOC-модуляции используется запись
.Для обозначения BOC-модуляции используется запись ![]()
![]() , где
, где ![]()
![]() и
и ![]()
![]() – два индекса, отвечающие отношениям
– два индекса, отвечающие отношениям ![]()
![]() =
= ![]()
![]() ,
, ![]()
![]() =
= ![]()
![]() .
.
В зарубежной литературе широко обсуждаются различные структуры корреляторов необходимые для реализации процедуры поиска навигационных сигналов с BOC-модуляцией.
Так одним их первых подходов к реализации процедуры поиска BOC-сигналов стал "bump-jumping алгоритм"принцип работы которого заключался в одновременной оценке всех пиков АКФ BOC-сигнала[3, 4]. Так для реализации поиска сигналов смодуляцией BOC(1, 1)необходимо 3 коррелятора (рис. 1), причем первый коррелятор следит за левым пиком (ЛК), второй коррелятор за центральным пиком (ЦК), третий коррелятор за правым пиком (ПК) АКФ, при этом раскрыв позадержке между корреляторами равен ![]()
![]() (
(![]()
![]() ).
).
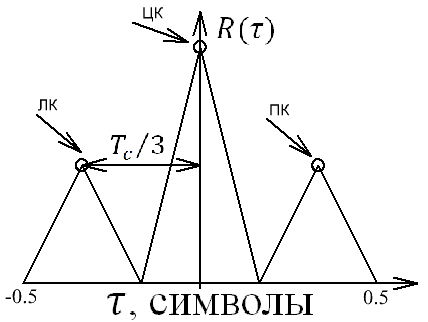
рис. 1 пояснение к bump-jumping"алгоритмам
"Bump-jump" алгоритмы в зарубежной литературе считаются ресурсозатратными, так как увеличение частоты меандра (порядка BOC-модуляции) относительно частоты дальномерного кода приводит к увеличению числа пиков АКФ и следовательно к количеству корреляторов необходимых для решения задачи поиска. Например для поиска сигналов с модуляцией BOC(2, 1) необходимо 7 корреляторов, для сигналов BOC(3, 1) -11 корреляторов и т. д.
На рис. 2 представлена блок-схема корреляторов, применяемых для реализации "Bump-jump" алгоритма во время процедуры поиска BOC-сигналовcмодуляциейBOC(1, 1). В данной схеме ![]()
![]() входной сигнал,
входной сигнал, 
 несущая частота и задержка опорного сигнала,
несущая частота и задержка опорного сигнала, ![]()
![]() опорный сигнал. Все сигналы на рис. 2 представлены в комплексной форме.
опорный сигнал. Все сигналы на рис. 2 представлены в комплексной форме.
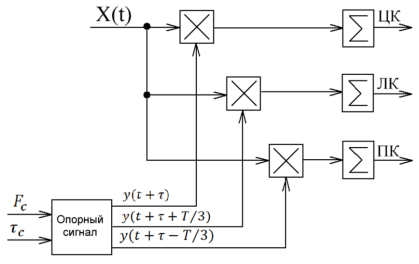
рис. 2 блок-схема корреляторов для реализации "Bump-jump" алгоритма
Следующим этапом развития структуры корреляторов для поиска BOC-сигналов стало семействоBPSK-likeалгоритмов, а так же семейство SubCarrier Phase Cancellation алгоритмов (SCPC)[ 4, 5].
Идея BPSK-likeалгоритмов заключается в обработке BOC-сигнала как суммы двух BPSK-сигналов (binaryphaseshiftkeyingsignals) сдвинутых относительно центральной частоты принимаемого сигнала на частоту равной частоте меандра ![]()
![]() (рис. 3).
(рис. 3).
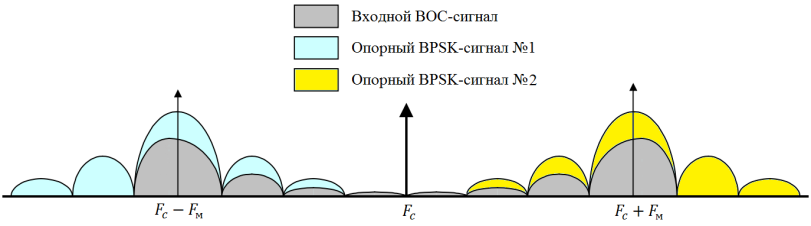
рис. 3 Пояснение к работе BPSK-likeалгоритма
BPSK-like алгоритмы позволяют привести АКФ BOC-сигналов к виду АКФ BPSK-сигналов (рис. 4), тем самым исключить многопиковую неоднозначность АКФ BOC-сигналов.
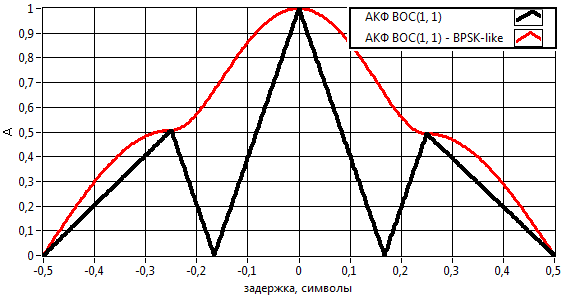
рис. 4. Квадрат модуля АКФ BOC-сигнала при применении BPSK-like алгоритма.
Расчет модуля АКФ в BPSK-like алгоритме во время процедуры поиска происходит следующим образом:


![]()
![]()
где ![]()
![]() дальномерный код опорного сигнала.
дальномерный код опорного сигнала.
Для BPSK-like алгоритмов количество корреляторов необходимых для процедуры поиска BOC-сигналов не зависит от порядка BOC-модуляции принимаемых сигналов. Блок-схема корреляторов BPSK-like алгоритмов представлена на рис. 5.
рис. 5 блок-схема корреляторов BPSK-likeалгоритмов
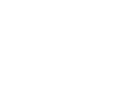
В отличие от BPSK-like алгоритмов SCPC алгоритмы основаны на том, что поиск дальномерного кода и фазы меандра(поднесущей) разделены [4]. Входной сигнал в корреляторе умножается на опорный дальномерный код и на две копии поднесущих, сдвинутые относительно друг друга (рис. 6) и играющие роль синфазной и квадратурной опорных поднесущих, которые можно записать в виде:
![]()
![]() ,
, ![]()
![]()
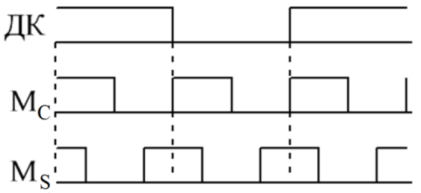
рис. 6. Пояснение к SCPC алгоритму, где ![]()
![]() и
и ![]()
![]() поднесущие, а
поднесущие, а ![]()
![]() дальномерный код
дальномерный код
SCPC алгоритмы также как BPSK-like алгоритмы позволяют устранить многопиковую неоднозначность АКФ BOC-сигналов что и видно на рис. 8.
рис. 8. Квадрат модуля АКФ сигнала с модуляцией BOC(1, 1) в SCPC алгоритме
По аппаратным затратам SCPC алгоритмы незначительно выигрывает у BPSK-like алгоритмов, так как для реализации SCPC алгоритмов требуется в два раза меньше генераторов синуса/косинуса.
Блок-схема корреляторов SCPC алгоритма представлена на рис 7.
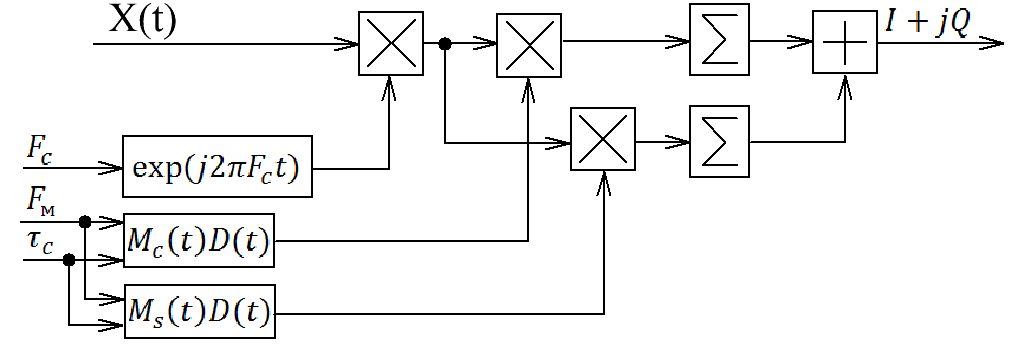
рис. 7 блок-схема корреляторов SCPCалгоритма
Для обеспечения приемлемых условий обнаружения BOC-сигналов во время поиска при допущении двукратного уменьшения мощности квадрата огибающей, шаг поиска для "Bump-jump" алгоритмов равен ![]()
![]() , для SCPC и BPSK-like алгоритмов
, для SCPC и BPSK-like алгоритмов ![]()
![]() . Соответственно время поиска сигналов по задержке у SCPC и BPSK-like алгоритмов на треть меньше чем у "Bump-jump" алгоритмов, что существенно сокращает общее время поиска BOC-сигналов. Более перспективным среди рассмотренных алгоритмов является SCPC алгоритмы так как для их реализации необходимо меньше аппаратных затрат чем для BPSK-like алгоритмов.
. Соответственно время поиска сигналов по задержке у SCPC и BPSK-like алгоритмов на треть меньше чем у "Bump-jump" алгоритмов, что существенно сокращает общее время поиска BOC-сигналов. Более перспективным среди рассмотренных алгоритмов является SCPC алгоритмы так как для их реализации необходимо меньше аппаратных затрат чем для BPSK-like алгоритмов.
Список литературы
1. Концепция развития навигационных сигналов глобальной навигационной системы ГЛОНАСС. М., 2009.
2. Новый класс меандровых шумоподобных радиосигналов для радионавигационных систем - М.: издательство МАИ. Вестник Московского авиационного института №7, 2009 г., т. 16.
3.VincentHeiries, Daniel Roviras, Lionel Riesand Vincent Calmettes. Analysis of NonAmbiguous BOC Signal Acquisition Perfomance. Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004) September 24, 2004.
4.Salim Attia, Khaled Rouabah, Djamel Chikouche and Mustapha Flissi. Side peak cancellation method for sine-BOC(m, n)-modulated GNSS signals. EURASIP Journal on Wireless Communications and Networking 2014.
