

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Так расстояние до объектов, попавших в сектор с углом ?2, будет определяться с погрешностью меньшей или равной 10%, если ?2 =500.При этом расстояние DE (см. рис 3.3) равно примерно 1м. Таким образом, можно сказать, что расстояние более 1м определяется радаромс геометрической погрешностью не более 10%.
Аппаратурное уменьшение геометрической погрешности возможно при увеличение числа акустических головок радара, что неизбежно приведет к удорожанию устройства.
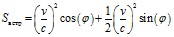
Другим фактором, вызывающим появление ошибки при определении расстояния акустическим методом являются ветровые воздействия. В общем случае на скорость звука оказывают влияние как продольная, так и поперечная составляющие ветра. Для ветра, вектор скорости которого составляет угол ? к акустической оси преобразователя, общее увеличение времени пробега волн составит согласно [1]
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
