
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
-Взаимодействие с аппаратурой спутниковой навигации (АСН).
Группа задач обеспечения взаимодействия с НКУ:
-Организация информационно-командной связи с НКУ;
-Ввод и обработка командно-программной информации;
-Ввод и обработка разовых (релейных) команд;
-Сбор предварительная (оценка полноты и достоверности получаемых данных) обработка и передача телеметрической информации.
Специфической особенностью малых массово-габаритных космических аппаратов является использование единой бортовой вычислительной системы для реализации функциональности БКУ, включая СОС, навигационный комплекс и обеспечение взаимодействия с НКУ. Как следствие с одной стороны архитектура бортового программного обеспечения существенным образом усложняется, однако информационное взаимодействие имеет единую, прозрачную организацию. При выборе ОСРВ и последующей разработке ПО необходимо обратить особое внимание и на возможность последующей доработки и расширения функциональности базового кода. Использование модульной структуры ПО позволяет существенно упростить решение задачи наращивания функциональности базовой платформы, безболезненное включение новых задач и комплексов за счет унифицированной, хорошо отлаженной инфраструктуры управления и информационного взаимодействия. Поэтому модульность ОСРВ будет рассматриваться одной из наиболее принципиальной характеристики рассматриваемых ОСРВ.
КА “Канопус-В” разработан как аппарат дистанционного зондирования Земли, поэтому одним из наиболее важных критериев оценки качества функционирования системы ориентации и стабилизации являются точность наведения на объект съёмки и качество стабилизации целевой аппаратуры в процессе получения изображения. Для обеспечения точного наведения на цель съемки необходимо иметь на борту комплекс задач навигационно-баллистического обеспечения, способный эффективно прогнозировать положение центра масс КА в пространстве, а также уточнять навигационные параметры по данным от аппаратуры спутниковой навигации, а также обрабатывать данные, получаемые от системы астронавигации для определения ориентации связанных осей КА выбранной системы координат.
Для обеспечения выполнения целевой задачи по получению фотографических изображений Земной поверхности для КА «Канопус-В» была выбрана солнечно-синхронная орбита[32]. Данная орбита обеспечивает приблизительно одинаковую освещенность поверхности Земли над которой пролетает ИСЗ[11]. Космический аппарат, находящийся на солнечно-синхронной орбите большую часть своего активного существования находится в автономном полете, вне зоны радиовидимости наземных командно-измерительных пунктов, и должен исполнять заложенные на борт в сеансах связи программы съемок и управления бортовой аппаратурой.
При разработке ПО особое внимание было уделено решению задачи взаимодействия с НКУ. Данное взаимодействие является единственным способом наблюдения и управления.
Аппаратные средства малых КА, бортовые шины передачи данных, радиолинии.
Современные КА в зависимости от их целевого назначения имеют разнообразный набор аппаратных средств. Тем не менее, основной состав систем, обеспечивающих жизнедеятельность КА, остается общим. К нему относятся[11]:
-система энергоснабжения;
-командная радиолиния;
-исполнительные органы (двигатели-маховики, реактивные двигатели, магнитные катушки, гравитационные штанги и т. п.) системы ориентации;
-чувствительные органы системы ориентации (солнечные датчики, звездные датчики, датчики угловой скорости, инфракрасная вертикаль и т. п.);
-система обеспечения температурного режима.
В качестве целевой аппаратуры может выступать телевизионная или фотокамера, радио-ретранслятор, научная аппаратура для фундаментальных исследований и т. д. Характером установленной на КА целевой аппаратуры и особенностями ее эксплуатации определяются основные характеристики всего КА. К таковым относятся:
-необходимая точность работы системы ориентации;
-требуемые режимы ориентации;
-набор разовых команд управления и семантика командно-программной информации;
-энерговооруженность;
-состав комплекса бортовых обслуживающих систем.
Представляющий наибольший прикладной интерес с точки зрения реализации результатов данной НИР КА «Канопус-В» относится к классу малых массогабаритных КА дистанционного зондирования Земли. Для выполнения данной целевой задачи КА требуется осуществлять очень точное поддержание заданной ориентации для недопущения искажения получаемых снимков подстилающей поверхности. Для обеспечения выполнения этих требований на этапе штатной работы для определения и поддержания ориентации КА используется система астронавигации совместно с малоинерционными двигателями маховиками, позволяющими осуществлять поддержание точной стабилизации КА с минимальными возмущениями[32].
Шины передачи данных.Взаимодействие периферийных устройств КА с БВС осуществляется по цифровым или аналоговым шинам передачи данных. К шинам передачи данных использующихся в космической технике, предъявляются жесткие требования:
-высокая пропускная способность;
-магистральный принцип обмена;
-высокая достоверность передачи информации;
-высокая помехозащищенность и гальваническая развязка;
-минимизация связей (сложности топологии) и, соответственно, массы;
-резервирование;
-высокая степень отработанности, в том числе летные испытания экспериментальных образцов вне бортового комплекса управления;
-серийность элементной базы;
-стандартизация (в том числе международная) интерфейса ввода-вывода.
Одними из наиболее распространенных и, соответственно, отработанных являются шины CAN и 1553B (МКО). Основными особенностями мультиплексного канала обмена 1553B являются[17]:
-магистральный принцип построения;
-командно-ответный принцип обмена;
-число абонентов сети – 32;
-магистраль, выполненная в виде экранированной пары витой пары проводов, протяженностью до 100 метров;
- использование манчестерского кода для кодирования информации;
-стандартизация (ГОСТ Р 52070-2003, MIL-STD-1553B, STANAG 3838 AVS) форматов обмена, содержимого служебных слов и логики управления каналами;
В свою очередь шина CAN обладает следующими особенностями[28]:
-возможность работы в режиме жестко реального времени;
-простота реализации;
-арбитраж сети без потери пропускной способности;
-высокая устойчивость к помехам;
-надежный контроль ошибок передачи и приема;
-является широковещательным одноранговым последовательным интерфейсом;
-стандартизация форматов обмена ISO 11898;
-количество абонентов для версии 2.0А – 2048;
-широкий диапазон скоростей работы;
-большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков;
-при скорости передачи данных 500кб\сек протяженность магистрали 100 метров.
Стандарт CAN оптимизирован для систем, в которых должны передаваться относительно небольшие объемы информации к любому или всем узлам сети. Множественный доступ с опросом состояния шины позволяет каждому узлу получить доступ к шине с учетом приоритетов.
Система энергоснабжения
Система энергоснабжения КА выполняет функции по преобразованию солнечной энергии в электрическую, ее накопление и обеспечение ей абонентов электрической сети космического аппарата. Данная система должна включать в себя защиты от коротких замыканий, а также обеспечивать контроль заряда батареи не допуская ее перезаряда и, как следствие, выхода из строя. Систему энергоснабжения строят таким образом, чтобы была предусмотрена возможность управления ключами питания как с использованием БВС, так и напрямую, с использованием разовых команд. Это позволяет производить работы по аварийному снятию и подаче питания на выбранные устройства в обход БВС, например в случае ее выхода из строя.
БВСНа КА «Канопус-В» используется схема с ненагруженным резервированием большинства модулей авионики и нагруженным («теплым») резервирование БВС. «Теплое» резервирование БВС означает, что от момента отделения он разгонного блока ракеты-носителя на резервную БВС подано питание, но она находится в неактивном состоянии до тех пор, пока основная машина управляет КА. Это означает, что при отказе основной БВС, резервная БВС берет управление на себя и начинает производить операции по парированию сбоев, а также выборе необходимого комплекта оборудования[32].
Взаимодействие БВС с блоками авионики выполнено в цифровом формате с использованием шин МКО и CAN. Информационный обмен осуществляется на основе заранее разработанных и согласованных протоколов информационного обмена. Обе шины и МКО и CAN построены по резервированной схеме обмена. Абоненты, требующие временной детерминированности информационного взаимодействия являются абонентами шины МКО. Для устройств, не требующих жесткой привязки ко времени при передаче данных, может использоваться шина CAN, задержка по передаче данных в которой может быть регламентирована на пользовательском (прикладном) уровне архитектуры программного обеспечения.
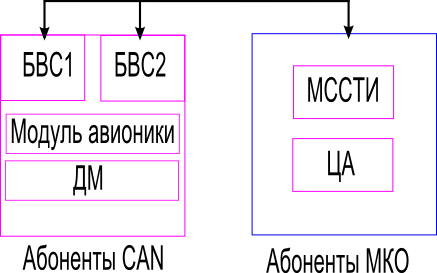
Рис.1.1 - Схема бортовой информационной сети КА
Бортовая вычислительная система КА "Канопус-В" содержит два вычислительных модуля, построенных на процессоре архитектуры SPARC, с тактовой частотой 14 мегагерц, объемом оперативной памяти 4 мегабайта и содержащей блоки энергонезависимой памяти объемом 1 мегабайт[32]. Скромные по сравнению с ПК аппаратные ресурсы накладывают жесткие ограничения на выбор операционной системы и требуют реализации наиболее эффективных и одновременно наименее ресурсоемких алгоритмов бортового ПО.
Сеть CAN содержит интерфейсные модули сопряжения (периферийные вычислители). Интерфейсные модели предназначаются для подключения по единому интерфейсу большой номенклатуры устройств. Данный интерфейсные модули могут иметь собственную логику управления присоединенными к нему устройствами, избавляя тем самым БВС от необходимости реализации специфических алгоритмов управления конкретным оборудованием. Использование периферийных вычислителей позволяет обеспечить распараллеливание и синхронизацию управляющих воздействий для реализации выбранного цикла управления (дисциплины управления оконечным оборудованием). Так, например, можно распараллелить решение асинхронной задачи сбора телеметрической информации от датчиков, подключенных к периферийным вычислителям и их синхронную, централизованную передачу в бортовую вычислительную систему для использования в задачах анализа и дальнейшей транзитной передачи в НКУ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
