


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.865.8:531.8
аЛГОРИТМИЗАЦИЯ МЕТОДА ОПРЕДЕЛЕНИЯ РАБОЧЕЙ ЗОНЫ МАНИПУЛЯТОРА
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
,
Омский государственный технический университет, г. Омск, Россия
Аннотация: Представлен алгоритм нахождения рабочей зоны манипулятора параллельной структуры на основе решения обратной задачи кинематики. Особенностью решения обратной задачи в данной статье является применение так называемых виртуальных поворотов. Алгоритм обеспечивает определение массива сечений в трех координатных плоскостях с последующим их объединением в единую рабочую зону манипулятора. Для нахождения критических точек положения схвата, соответствующих предельным значениям длин штанг, использовался метод перебора значений координат центра схвата.
Ключевые слова: манипуляторы параллельной структуры, рабочая зона, виртуальные повороты, критические точки.
Введение
Промышленные роботы играют важную роль в производственном процессе, выполняя как основные, так и вспомогательные технологические операции. В последнее время все большее распространение в связи с рядом их преимуществ получают промышленные роботы, манипуляторы которых имеют так называемую параллельную структуру.
Для более рационального расположения манипулятора относительно технологического оборудования необходимо знать конфигурацию его рабочей зоны.
Постановка задачи
Способов определения рабочей зоны манипуляторов параллельной структуры к настоящему времени разработано сравнительно мало, поэтому важность разработки такого метода достаточно высока. В статье [1] рассматривается построение рабочей зоны на основе решения обратной задачи о положениях и определения углов приводных звеньев. В работе [2] представлен вариант расчета рабочей зоны манипулятора с применением системы MATLAB. Каждый из этих методов ориентирован на определенную конструкцию манипулятора параллельной структуры. В работе [3] предложен универсальный метод решения обратной задачи, применимый для манипуляторов параллельной структуры с любым количеством штанг. В методе используются так называемые виртуальные повороты. В статье [4] на основе материалов работы [3] описан метод определения рабочей зоны таких манипуляторов.
Вычислительные эксперименты [4] показали высокую трудоемкость определения рабочей зоны манипуляторов в отсутствии элементов автоматизации ее решения. В связи с этим в данной статье на примере трипода предлагается алгоритм, автоматизирующий построение рабочей зоны манипуляторов параллельной структуры.
Теория
Манипулятор параллельной структуры (в данном случае трипод) представляет собой две платформы – неподвижная платформа-основание A и подвижная платформа B с закрепленным на ней схватом (рисунок 1). Подвижность платформы B обеспечивается тремя штангами A1B1, A2B2, A3B3 со встроенными для изменения их длин механизмами. Штанги с

Рисунок 1 – Обобщенная схема манипулятора с тремя штангами (трипод)
платформами соединены сферическими шарнирами (в точках Ai и Bi; i = 1, 2, 3), которые позволяют манипулятору менять положение платформы B относительно основания A.
Построение рабочей зоны манипулятора сводится, по сути, к нахождению численными методами предельно допустимых положений подвижной платформы B, определяемых минимальными и максимальными значениями длин соответствующих штанг. Именно, исходя из этого тезиса, и разработан предлагаемый алгоритм автоматизированного построения рабочей зоны манипулятора.
Головной алгоритм программы построения рабочей зоны манипулятора состоит их пяти укрупненных блоков (рисунок 2). Первый (операторы 1 и 2) и пятый (оператор 7) блоки являются служебными (сервисными) и не требуют пояснений.
Основными блоками являются блоки 4, 5 и 6, определяющие в цикле предельные положения подвижной платформы соответственно в плоскостях XY, XZ и YZ. В каждом из блоков предусмотрено обращение к алгоритмам подпрограмм: «Расчетный блок. Размеры штанг», «Поиск максимальных критических точек» и «Поиск минимальных критических точек».
В алгоритме «Расчетный блок. Размеры штанг» (рисунок 3) на основе метода виртуальных поворотов [3] при дискретно задаваемых программой положениях подвижной платформы (положениях схвата) рассчитываются длины штанг.
Алгоритмы «Поиск максимальных критических точек» (рисунок 4) и «Поиск минимальных критических точек» обеспечивают соответственно поиск предельных положений платформы при максимально и минимально допустимых длинах штанг. (Блок-схема алгоритма «Поиск минимальных критических точек» здесь не приводится, так как она совпадает с блок-схемой алгоритма «Поиск минимальных критических точек» за исключением знаков неравенств).
Результаты экспериментов
В соответствии с разработанным алгоритмом составлена в среде MATLAB вычислительная программа, позволяющая представить результаты расчетов в виде разрезов (каркасов) в соответствующих плоскостях и визуализировать рабочую зону манипулятора (рисунок 5).
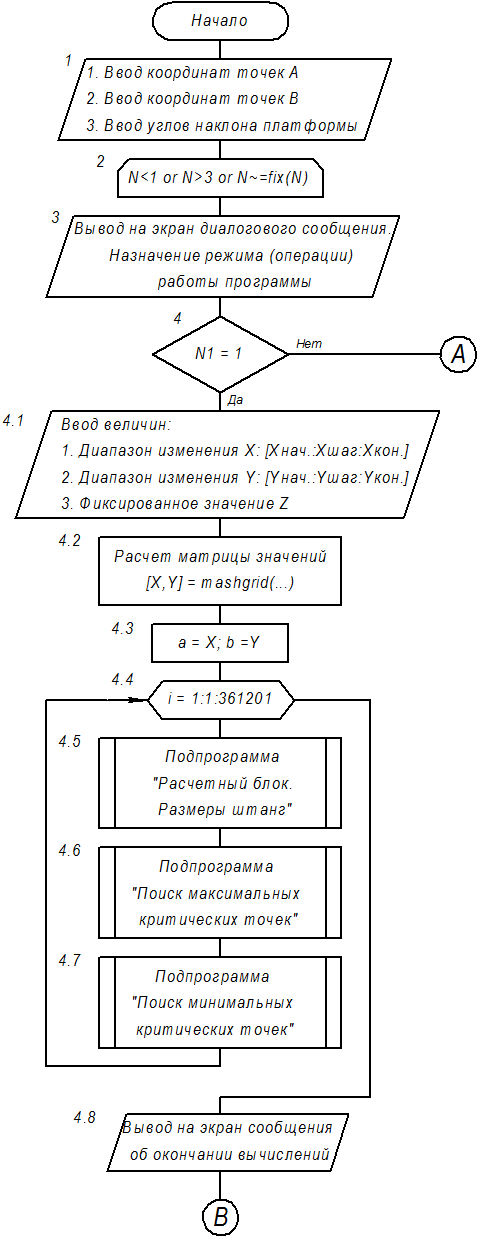
Рисунок 2 – Блок-схема головного алгоритма (начало)
Для проведения численного эксперимента рассмотрим трипод, опоры штанг которого на основании А и на платформе В образуют равносторонние треугольники со сторонами, равными соответственно 69.28 и 34.64 относительных единиц. Минимальные и максимальные длины выдвижения штанг приняты равными соответственно 100 и 150 единиц. Рабочую зону манипулятора параллельной структуры определим при углах наклона
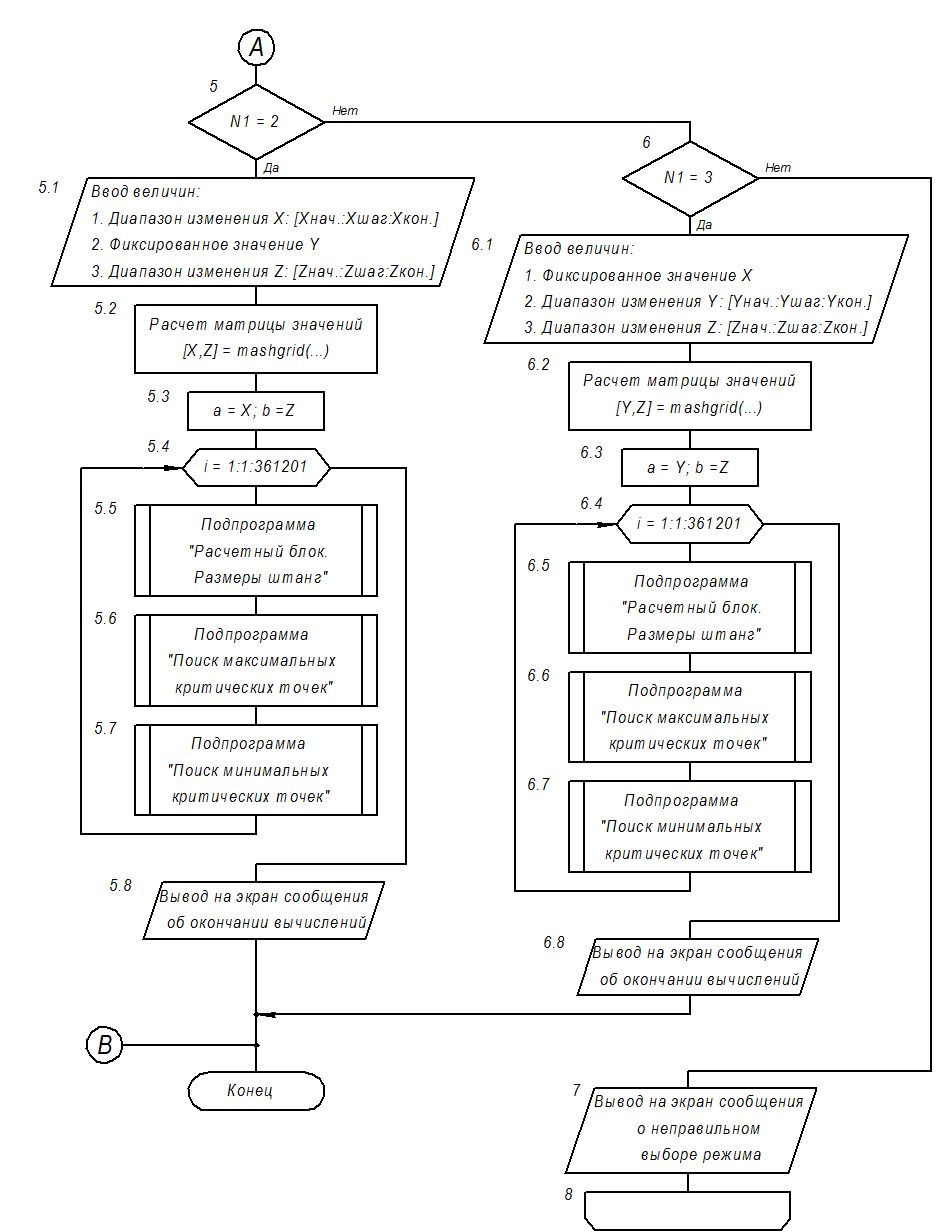
Рисунок 2 – Блок-схема головного алгоритма (окончание)
схвата: X0^ZC = Y0^ZC = X0^YC = 90° (здесь: X0, Y0 и YC ZC – соответственно координатные оси систем координат основания и схвата). Полученная для данного манипулятора рабочая зона представлена на рисунке 5. Аналогичным способом можно найти и рабочие зоны для любого другого угла наклона платформы B относительно неподвижной платформы A.
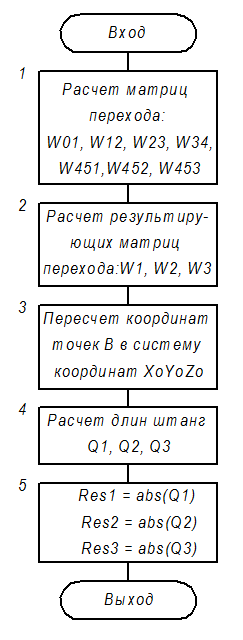
Рисунок 3 – Блок-схема алгоритма «Расчетный блок. Размеры штанг»
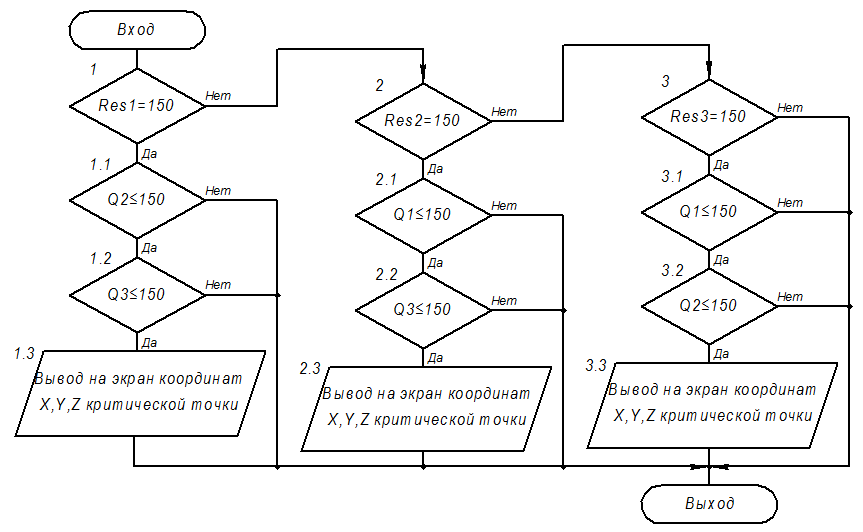
Рисунок 4 – Блок-схема алгоритма «Поиск максимальных критических точек»
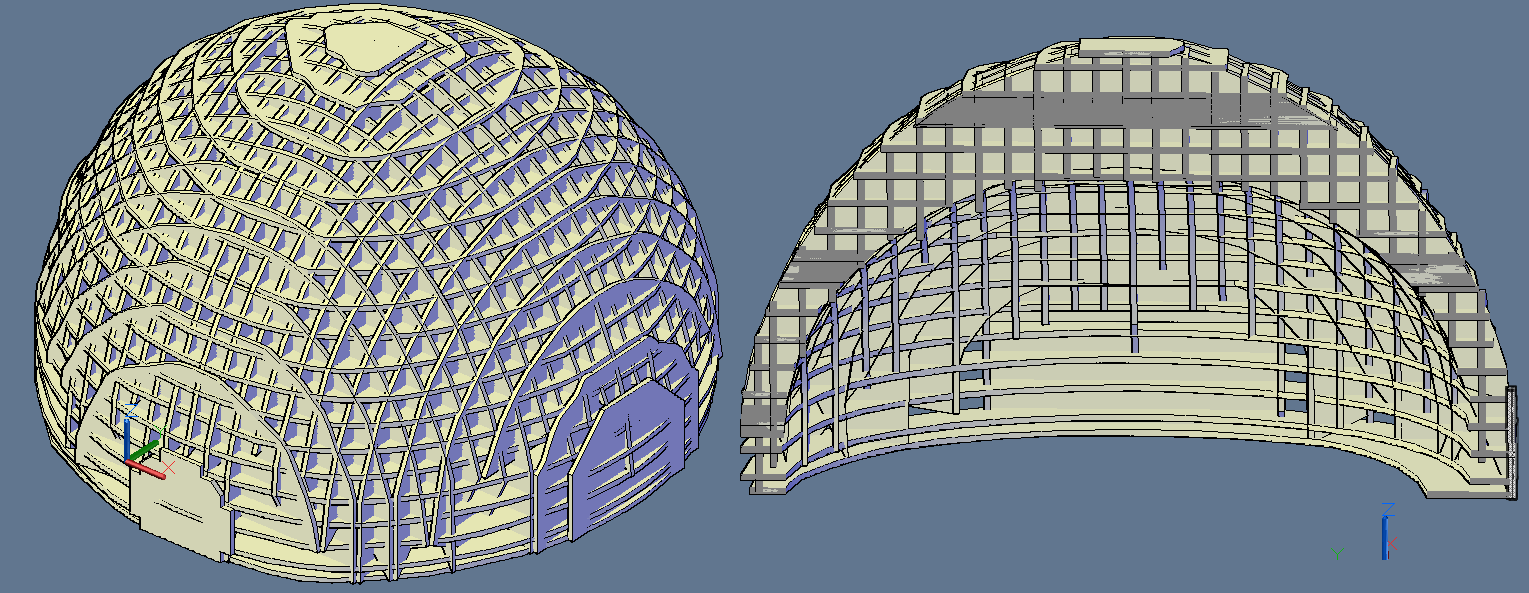
Рисунок 5 – Рабочая зона манипулятора (вид сверху и в разрезе)
Обсуждение результатов
Предложенный алгоритм, как показали численные эксперименты, позволяет достаточно точно выстраивать рабочую зону манипулятора параллельной структуры. Для большей точности шаг изменения координат можно задать более мелким, однако следует иметь в виду, что это приведет к увеличению количество критических точек в разы.
Выводы и заключение
Разработанный алгоритм и созданная на его основе вычислительная программа применимы для построения рабочей зоны манипуляторов платформенного типа с любым числом приводных штанг.
Библиографический список
1. Построение рабочей зоны шестистепенного манипулятора параллельной структуры на базе кривошипно-шатунного механизма / Интернет-журнал «НАУКОВЕДЕНИЕ» Том 8, №3 http://naukovedenie. ru/PDF/142TVN316.pdf (доступ свободный), 2016.
2. , Рабочая зона манипулятора параллельной структуры с тремя степенями свободы / Интернет-журнал «Технология текстильной промышленности» №3 (339) http://ttp. /wp-content/uploads/2015/10/339_23.pdf (доступ свободный), 2012.
3. , Метод виртуальных поворотов в решении обратной задачи кинематики манипуляторов платформенного типа (статья)/Омский научный вестник. - №2 (140). - Серия Приборы, машины и технологии. - 2015.- С.41 -44.
4. , Метод определения рабочей зоны автоматического манипулятора параллельной структуры / Россия молодая: передовые технологии – в промышленность. Омск – Изд-во ОмГТУ. – 2017. – с. 226 – 231.
