


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АЛГОРИТМ РАБОТЫ СИСТЕМЫ УПРАВЛЕНИЯ АВТОБАЛАНСИРУЮЩИМ УСТРОЙСТВОМ АКТИВНОГО ТИПА
магистрант группы АиУм-15-3 (КарГТУ)
Научный руководитель: д. т.н., профессор
Карагандинский Государственный Технический Университет
Республика Казахстан, /3, кв 47,+7-777-575-9760, *****@***ru
Нефть занимает ведущее место в мировом топливно-энергетическом балансе. Самым дешевым и экологически безопасным способом транспортировки нефти являются нефтепроводы. Для перекачки нефти используют магистральные насосные агрегаты. Магистральные насосные агрегаты имеют ряд недостатков, одним из которых является несбалансированность ротора. Это влечет за собой повышенную вибрацию, вследствие которой увеличивается интенсивность износа деталей, уменьшается срок службы насоса.
Предлагается использовать автобалансирующее устройство (АБУ) активного типа, которое, уменьшая влияние дисбаланса рабочего колеса, увеличивает срок службы насоса.
Анализ существующих видов активных АБУ, проведенный [1], показал, что в различных странах имеются неодинаковые подходы к разработке конструкций балансиров, отсутствует единая методология построения устройств. Для охвата всей совокупности конструктивных решений была разработана матрица возможных вариантов АБУ, различающихся по типу привода, элементам системы управления и траектории движения центра масс исполнительного органа перемещения балансировочных грузов. Выделено семь видов приводов балансирующих устройств, тринадцать видов систем автоматического управления, использующих различные комбинации механических, пневматических, магнитных и других элементов и семь видов сочетаний траекторий перемещения центра масс корректирующих грузов (по радиусу, хорде, дуге окружности или кривой).
Выделено активное АБУ с направленным перемещением балансиров. Данный тип конструкции АБУ обладает необходимым быстродействием, способен работать с измерительной системой, показывающей только наличие вибраций опор и изменение их амплитуды и не требующей измерения фаз дисбалансов. При этом измерительная система является простой и надежной за счет меньшего количества элементов и выполняемых функций. В качестве чувствительного элемента (датчика) измерительной системы используются механические или жидкостные элементы со свободным перемещением малых масс, что позволяет упростить конструкцию АБУ.
Рассмотрена конструкция автобалансирующего устройства активного типа, использующее механические балансиры. [2]
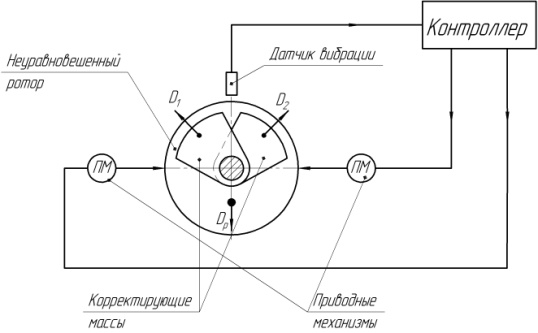
Рис. 1. Принципиальная схема автобалансирующего устройства активного типа
Главным конструктивным элементом данной балансирующей системы является балансирующее колесо (балансир), которое имеет втулки с пазами установки балансирующих масс, подшипника, обоймы для вилки.
Система управления таким устройством состоит их датчика вибрации, контроллера и двух приводных механизмов для каждого балансира индивидуально.
Алгоритм работы системы управления автобалансирующим устройством активного типа конструкции [2] можно представить в виде пяти функциональных блоков (Рис. 2. Алгоритм управления автобалансирующим устройством):
Измерение дисбаланса ротора, установка балансиров на начальный уровень; Измерение остаточного дисбаланса; Дисбаланс в допуске да(4)/нет(5); Окончание процесса балансировки; Вычисление необходимого угла поворота балансиров, его запоминание, поворот балансиров.Рис. 2. Алгоритм управления автобалансирующим устройством.
Для реализации первого пункта необходимо использовать датчики вибрации, измеряющие вибрацию в трех плоскостях для измерения вертикальной, поперечной и осевой вибраций.
После установки балансиров на начальный уровень, устройство переходит ко второму этапу – измерение остаточного дисбаланса. Измеряются вибрации с учетом балансиров, установленный на «нулевой уровень», т. е. угол между ними составляет 180°.
Далее контроллер сравнивает значение вибрации с допустимым нормативным значением на рабочем месте машиниста насосной. Если значение вибрации находится в пределах допустимого, то устройство, оставляет балансиры повернутыми на начальный угол.
Если значение вибрации больше нормы, то устройство реагирует переходом к этапу 5. Контроллер производит расчет необходимых углов поворота балансиров относительно дисбаланса рабочего колеса и относительно друг друга. Выбирается оптимальный угол поворота и приводные механизмы поворачивают на необходимый угол. Далее система переходит к этапу 2, где измеряется новый уровень вибрации, полученный в результате поворота балансиров. На этапе 3 устройство сравнивает полученные значения вибрации с допустимыми и, в зависимости от результата сравнения, переходит к этапу 4 или к этапу 5.
Мониторинг значений вибрации происходит в течение всей работы насосного агрегата, и если в ходе работы изменится дисбаланс колеса, то система автоматически выполнит балансировку по этапам 2, 3, 4, 5.
Таким образом, используя активные автобалансирующие устройства можно достичь увеличения срока эксплуатации подшипников, опорных узлов насосного агрегата, рабочего колеса, снижается вредное влияние вибрации на человека. Автобалансирующее устройство имеет преимущества по сравнению с зарубежными аналогами, т. к. обладает простой и надежной системой управления и конструкцией, что позволяет выполнить импортозамещение.
ЛИТЕРАТУРА
Автобалансирующие устройства ручных шлифовальных машин: Дис. канд. технич. наук. Томск, 1996. — 170 с. Автоматическое балансирующее устройство: Свидетельство на полезную модель. 22689 Российская Федерация, МПК F 16F 15/14. , , E. H. Пашков, . № 000/20; заявл. 30.07.01; опубл. 20.04.02, Бюл. № 18. 5 с.