
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.3. в любых дорожных условиях и в любой момент времени амортизатор практически может автоматически реализовать функционирование системы подрессоривания транспортного средства по любой, предварительно сформированной программе оптимального управления – это обеспечивается наличием «сверхширокого» диапазона (гипердиапазона) регулирования рабочих (диссипативных) характеристик, не имеющего в настоящее время аналогов в практике мирового машиностроения;
2. высокоэффективно решить задачу управляемости, устойчивости, стабилизации движения транспортного средства, стабилизации положения корпуса транспортного средства при движении на поворотах, по плохой дороге, при действии кратковременных и долговременных импульсных нагрузок, при разгоне и торможении транспортного средства; это обеспечивается за счет того, что
2.1. в зоне повышенных деформаций упругого элемента подвески транспортного средства жёсткость упругого элемента уже не менее чем в четыре раза выше, чем жёсткость штатных упругих элементов;
2.2. в зоне высоких деформаций упругого элемента подвески транспортного средства жёсткость упругого элемента уже не менее чем в двадцать раз выше, чем жёсткость штатных упругих элементов; заметим, что совокупностью свойств 1.2., 2.1. и 2.2., при введении дополнительного ограничении наибольших допускаемых напряжений величиной 800 Мпа, в настоящее время, во всём мире, практически не обладает ни один упругий элемент механического типа;
2.3. в любых дорожных условиях и в любой момент времени амортизатор практически может автоматически реализовать функционирование системы подрессоривания транспортного средства по любой, предварительно сформированной программе оптимального управления – это обеспечивается наличием «сверхширокого» диапазона (гипердиапазона) регулирования рабочих (диссипативных) характеристик, не имеющего в настоящее время аналогов в практике мирового машиностроения;
2.4. в любых дорожных условиях и в любой момент времени амортизатор практически может автоматически реализовать блокировочный режим, при котором он превращается в единое жёсткое звено; это свойство особенно ценно при движении с большой скоростью на поворотах, а также при резком разгоне или резком торможении - когда наиболее актуально решение задачи стабилизации положения кузова транспортного средства;
3. высокоэффективно решить задачу повышения средних скоростей
движения транспортного средства при движении по дорожному покрытию пониженного качества, на поворотах, при одновременном выполнении
условий ограничения уровня динамических нагрузок на перевозимый груз, пассажиров, экипаж, узлы и звенья транспортного средства, обеспечения заданных показателей плавности хода и стабилизации движения транспортного средства; это обеспечивается за счет того, что
3.1. в любых дорожных условиях и в любой момент времени амортизатор практически может автоматически реализовать функционирование системы подрессоривания транспортного средства по любой, предварительно сформированной программе оптимального управления – это обеспечивается наличием «сверхширокого» диапазона (гипердиапазона) регулирования рабочих (диссипативных) характеристик, не имеющего в настоящее время аналогов в практике мирового машиностроения;
4. при использовании режима автоматического управления адаптивной системой подрессоривания транспортных средств наиболее эффективным и экономичным способом реализовать адаптивную систему стабилизации движения транспортного средства, стабилизации положения его корпуса, оптимизации показателей управляемости, устойчивости и комфортабельности движения транспортного средства, непосредственно этим способствуя повышению быстроходности транспортного средства;
5. исключить «пробои подвески» транспортного средства;
6. исключить необходимость использования буферов отбоя и сжатия.
Обобщая вышеизложенное и, основываясь на имеющемся у нас опыте работ в области разработки адаптивных подвесок транспортных средств, достигнутом уровне нашей научной компетенции и нашего научного потенциала в данной области, мы можем с полной уверенностью заявить, что, в случае использования предлагаемых нами конструкций адаптивной системы подрессоривания, транспортное средство будет снабжено подвеской, которая по технико-экономическим показателям на многие годы качественно превзойдет известные мировые аналоги, «оставив далеко позади основных мировых конкурентов».
III. рабочие характеристики разработанных узлов адаптивной CИСТЕМЫ ПОДРЕССОРИВАНИЯ
Блокируемый адаптивный амортизатор с гипердипазоном («сверхшироким» дипазоном) регулирования диссипативных характеристик
Если характеризовать конструкцию разработанного нами семейства адаптивных амортизаторов, то можно сделать вывод, что в структурном отношении амортизатор включает два взаимосвязанных между собой основных узла:
собственно амортизатор, т. е. цилиндропоршневой узел и электрогидравлический клапан.Эти два узла по-разному влияют на формирование четырех основных вариантов оперативного управления рабочими (диссипативными) характеристиками амортизатора.
Предварительно отметим, что, в отличие от общеизвестных схем, в предлагаемых конструкциях адаптивных вариаторов его рабочая характеристика имеет следующую структуру:
![]()
здесь: ![]()
![]() - усилие на поршне амортизатора; я
- усилие на поршне амортизатора; я ![]()
![]() - оператор дифференцирования по переменной (времени) t;
- оператор дифференцирования по переменной (времени) t; ![]()
![]() – «управляющая матрица» амортизатора - матрица-столбец размера 2Ч1;
– «управляющая матрица» амортизатора - матрица-столбец размера 2Ч1; ![]()
![]() - величина управляющего тока в электрогидравлическом клапане амортизатора (первый управляющий параметр амортизатора);
- величина управляющего тока в электрогидравлическом клапане амортизатора (первый управляющий параметр амортизатора); ![]()
![]() – координата, определяющая положение поршня 1 (Рис.1) – расстояние поршня от его центрального, среднего положения в рабочем цилиндре 3 (второй управляющий параметр амортизатора).
– координата, определяющая положение поршня 1 (Рис.1) – расстояние поршня от его центрального, среднего положения в рабочем цилиндре 3 (второй управляющий параметр амортизатора).
Основным, определяющим компонентом управляющего воздействия на адаптивный амортизатор является, конечно же, величина управляющего тока ![]()
![]() Именно варьированием, главным образом, величиной
Именно варьированием, главным образом, величиной ![]()
![]() достигается реализация всего «бесконечного» - сверхширокого диапазона (гипердиапазона) регулирования диссипативных характеристик адаптивного амортизатора.
достигается реализация всего «бесконечного» - сверхширокого диапазона (гипердиапазона) регулирования диссипативных характеристик адаптивного амортизатора.
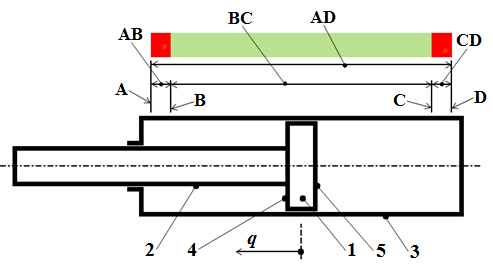
Рис.1 Схема амортизатора телескопического типа
На Рис.1 электрогидравлический клапан условно не показан.
В зависимости от вида функции ![]()
![]()
![]()
![]() (t) и от способа её формирования могут иметь место следующие, четыре варианта организации процесса оперативного управления диссипативными характеристиками амортизатора:
(t) и от способа её формирования могут иметь место следующие, четыре варианта организации процесса оперативного управления диссипативными характеристиками амортизатора:
автономный режим работы – управляющее воздействие
неизменно, т. е.
![]()
![]() = const. (1)
= const. (1)
Данный режим – наиболее простой конструктивный вариант управления характеристиками амортизатора. Он реализуется за счет естественного внутреннего автоматизма. В данном режиме, в достаточно широком диапазоне положений поршня, ограниченном зоной BC (Рис.1), и составляющем, примерно, 93-95% от общего максимального хода поршня, соответствующего общей рабочей зоне AD, рабочая характеристика амортизатора неизменна и состоит из одной кривой: кривой 1 на фазе отбоя, или кривой 4 на фазе сжатия (рис.2).
Однако после пересечения поршнем граничных положений ![]()
![]() , т. е. после пересечения правой грани 5 (Рис.1) поршня 1 положения C или левой грани 4 положения B, и по мере его дальнейшего движения в пределах области
, т. е. после пересечения правой грани 5 (Рис.1) поршня 1 положения C или левой грани 4 положения B, и по мере его дальнейшего движения в пределах области
соответствующей зонам CD и AB (зонам интенсивного демпфирования), вплоть до приближения поршня к крайним положениям D и A, степень демпфирования амортизатора, т. е. усилие Q на поршне 1 (Рис.1) и, следовательно, на штоке 2, начинает автоматически, прогрессивно увеличиваться.
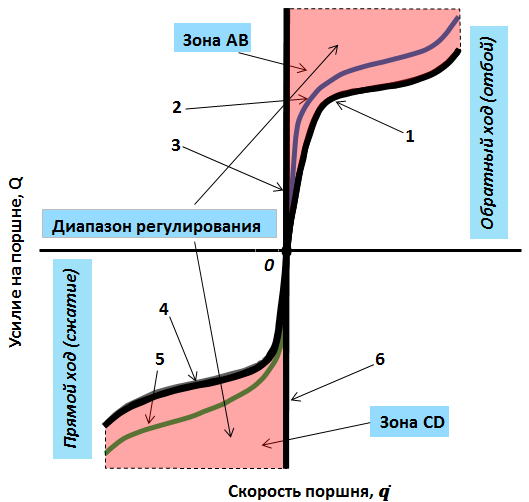
Рис.2 Рабочие характеристики амортизатора при неизменном управляющем воздействии
При этом соответствующая кривая характеристики начинает постепенно приближаться к оси ординат, занимая последовательно положения 1, 2 (Рис.2) и т. д. Наконец, в пределе, когда поршень окажется в крайнем левом положении, при котором левая грань 4 займет положение A(Рис.1), характеристика автоматически совместится с верхним лучом 3 оси ординат. В этом положении автоматически возникает режим «самоблокирования», при котором амортизатор превращается в единое жёсткое звено и дальнейшее движение поршня 1 левее положения A оказывается невозможным.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
