
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Подчеркнём, что при данном режиме работы имеет место «односторонняя блокировка» амортизатора.
Аналогичная ситуация имеет место на фазе сжатия, когда характеристика занимает последовательно положения 4, 5,6.
Таким образом, в данном режиме, только в зонах AB и CD интенсивного демпфирования адаптивного амортизатора, осуществляется регулирование диссипативных характеристик амортизатора. Причем это регулирование осуществляется автоматически, за счет конструктивных особенностей цилиндропоршневого узла.
Следует подчеркнуть, что отмеченные выше крайние, предельные положения A и D поршня, описываемые отрезками 3 и 6 рабочих характеристик, соответствуют второму варианту организации процесса управления диссипативными характеристиками амортизатора, а именно
блокировочному режиму работы амортизатора, при которомамортизатор превращается в единое жёсткое звено.
Этот режим, как отмечено выше, возникает автоматически при условии,
когда поршень занимает крайние положения A или D (Рис.1). Вместе с тем блокировочный режим, помимо варианта описанного выше, может также реализовываться в любой момент времени и при любом положении поршня путем установления соответствующего значения величины управляющего тока ![]()
![]()
Следующим, третьим вариантом организации оперативного управления диссипативными характеристиками амортизатора является
3. режим ручного управления.
Этот режим - режим принудительного управления характеристиками амортизатора со стороны водителя ТС - в первую очередь характеризуется тем, что, в отличие от (1),
![]()
![]() = varia. (2)
= varia. (2)
Причем, реализация условия (2) осуществляется «вручную», непосредственно водителем ТС.
Диапазон регулирования рабочих характеристик амортизатора на фазе отбоя представляет собой совокупность бесконечно-непрерывного семейства кривых 1…3 и отрезка 4 (Рис.3), непрерывно заполняющих весь первый квадрант координатной плоскости Q0![]()
![]() .
.
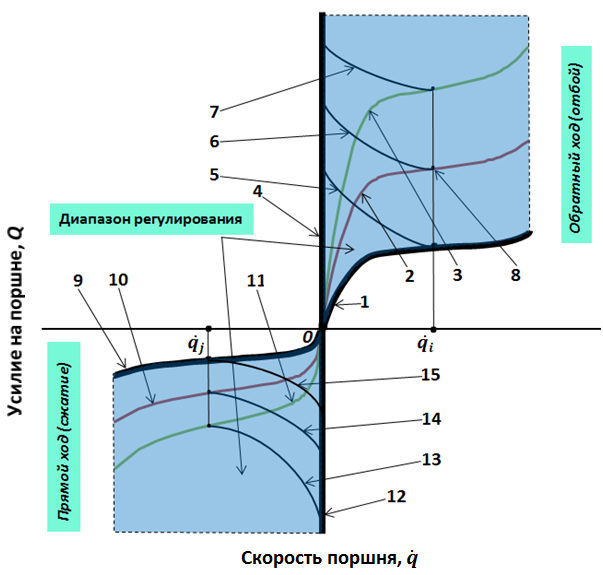
Рис.3 Рабочие характеристики амортизатора при изменении управляющего воздействия ![]()
![]()
И это действительно так, поскольку, во-первых, за счёт выбора конструктивных параметров цилиндропоршневого узла и электрогидравлического
клапана адаптивного амортизатора степень его демпфирования можно сделать весьма незначительной. Другими словами, кривую 1 на Рис.3 можно «неограниченно приблизить» к оси абсцисс, вплоть до её слияния с осью абсцисс. Во - вторых, за счет выбора, согласно (2), величины управляющего тока в электрогидравлическом клапане амортизатора, степень демпфирования амортизатора можно неограниченно увеличивать, вплоть до реализации блокировочного режима, при котором характеристика амортизатора совместится с лучом 4.
Таким образом, можно сделать вывод, что предлагаемые конструктивные схемы адаптивных амортизаторов позволяют реализовать «бесконечный» диапазон регулирования диссипативных характеристик, т. е. реализуют «гипердиапазон» регулирования диссипативных характеристик.
Следует иметь в виду, что в рассматриваемом режиме, в зоне BC (Рис.1), изменение характеристик амортизатора осуществляется только за счет функционирования электрогидравлического клапана. Вместе с тем, в зонах AB и CD на формирование характеристик начинают оказывать существенное влияние и конструктивные параметры цилиндропоршневого узла. Данное обстоятельство проявляется тем значительнее, чем ближе поршень приближается к крайним положениям A и D. И, наконец, в крайних положениях A и D амортизатор имеет в качестве рабочей характеристики отрезок 4 или 12, соответственно, (Рис.3).
Помимо отмеченных особенностей, данному режиму свойственно ещё одно, весьма полезное в практическом отношении, качество: способность реализовать в любом положении поршня и в любой момент времени блокировочный режим. Предположим, что амортизатор «работает» согласно характеристике 2 (Рис.3). Пусть при некотором значении ![]()
![]() =
= ![]()
![]() , скорости поршня, т. е. в некоторой точке 8, мы решили его заблокировать, т. е. фактически превратить его в единое жёсткое звено. Водитель подаёт на блок управления соответствующий сигнал - выбирает заданную величину управляющего тока
, скорости поршня, т. е. в некоторой точке 8, мы решили его заблокировать, т. е. фактически превратить его в единое жёсткое звено. Водитель подаёт на блок управления соответствующий сигнал - выбирает заданную величину управляющего тока ![]()
![]() в электрогидравлическом клапане. При этом амортизатор автоматически «переходит» в точке 8 с характеристики 2 на кривую 6 и, далее, в момент остановки поршня – на отрезок 4.
в электрогидравлическом клапане. При этом амортизатор автоматически «переходит» в точке 8 с характеристики 2 на кривую 6 и, далее, в момент остановки поршня – на отрезок 4.
Аналогичное утверждение имеет место и для фазы «сжатия».
Здесь необходимо отметить, что в отличие от случая, рассмотренного при анализе автономного режима работы амортизатора, при управлении величиной управляющего тока ![]()
![]() достигается реализация «двухсторонней блокировки», когда движения поршня блокируются одновременно во всех направлениях.
достигается реализация «двухсторонней блокировки», когда движения поршня блокируются одновременно во всех направлениях.
Последним, четвертым вариантом организации оперативного управления диссипативными характеристиками амортизатора является
4. режим автоматического управления.
Этот режим удовлетворяет условию (2). Однако управляющее воздействие уже осуществляется в автоматическом режиме в соответствии с установленной программой. Рабочие характеристики и функциональные возможности амортизатора соответствуют предыдущему режиму.
2. Упругий элемент с нелинейной характеристикой и автоматической оптимизацией локализации рабочих зон.
Напомним основные отличительные особенности разработанных нами упругих элементов.
1. Рабочая характеристика - зависимость усилия на упругом элементе от его деформации - существенно нелинейная.
2. В каждой точке рабочей характеристики работает (деформируется) та зона упругого элемента, в которой напряжения не превосходят предварительно заданной величины. Остальные участки упругого элемента последовательно исключаются из последующей работы.
3. Форму отдельных участков рабочей характеристики можно предварительно формировать, согласно заданным критериям.
Во всех разработанных нами конструкциях упругих элементов максимальные напряжения в упругом элементе не превосходят 800 МПа.
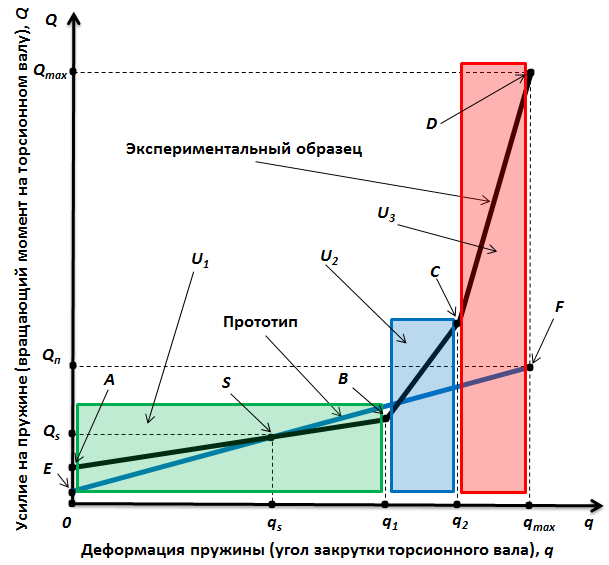
В приведенных ниже данных, для оценки эффективности разработанных нами конструкций параллельно приводятся соответствующие характеристики существующих реальных прототипов – традиционно используемых в настоящее время упругих элементов с линейными рабочими характеристиками, которые работают в аналогичных условиях и имеют аналогичные базовые габариты. Для количественной же оценки технических преимуществ наших конструкций упругих элементов введем в рассмотрение общепринятые оценочные параметры:
с = ![]()
![]() , (3)
, (3)
kd = Qmax/Qs , (4)
Rd =![]()
![]() - QsЧ(qmax – qs). (5)
- QsЧ(qmax – qs). (5)
Здесь: Q - усилие на упругом элементе; q - деформация упругого элемента; Qmax - максимальное усилие на упругом элементе; qmax - максимальная деформация упругого элемента; Qs - статическая нагрузка на упругом элементе; qs - статическая деформация упругого элемента; с - жесткость рассматриваемого участка (точки) упругого элемента; kd - коэффициент динамичности; Rd - динамическая емкость упругого элемента подвески.
Помимо общепринятых параметров (3)…(5) введем дополнительно в рассмотрение следующие, относительные величины:
Kc = c1/cp, (6)
KQ = Qmax,1/Qmax, p, (7)
KR = Rd,1/Rdp. (8)
Здесь: c1 - жесткость рассматриваемого участка (точки) экспериментального образца упругого элемента; cp - жесткость рассматриваемого участка (точки) упругого элемента прототипа; Qmax,1 - максимальное усилие на экспериментальном образце упругого элемента; Qmax, p - максимальное усилие на упругом элементе прототипа; Rd,1 - динамическая емкость экспериментального образца упругого элемента подвески; Rdp - динамическая емкость упругого элемента подвески прототипа.
Нами разработаны две принципиально отличающиеся друг от друга конструктивные схемы упругих элементов с нелинейной характеристикой и автоматической оптимизацией локализации рабочих зон, рабочие характеристики которых приведены на Рис.4 и Рис.5.
На Рис.4 представлены рабочая линейная характеристика прототипа - серийно выпускающихся упругих элементов (прямая ЕF) и рабочая характеристика экспериментального образца - кривая АBCD, разработанного
нами упругого элемента с нелинейной характеристикой и автоматической оптимизацией локализации рабочих зон. Данный упругий элемент разработан для

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
