
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где ![]() – каталожное значение тока статора электродвигателя при ПВ=100%, А;
– каталожное значение тока статора электродвигателя при ПВ=100%, А;![]() – коэффициент, который зависит от способа охлаждения электродвигателя.
– коэффициент, который зависит от способа охлаждения электродвигателя.
Для электродвигателей с самовентиляцией
![]() (4.19)
(4.19)
где ![]() – коэффициенты, учитывающие ухудшение теплоотдачи двигателя:
– коэффициенты, учитывающие ухудшение теплоотдачи двигателя:
 (4.20)
(4.20)
где ![]() ,
, ![]() – коэффициенты, учитывающие уменьшение теплоотдачи электродвигателя при стоянке,
– коэффициенты, учитывающие уменьшение теплоотдачи электродвигателя при стоянке, ![]() – коэффициент использования паспортной скорости.
– коэффициент использования паспортной скорости.
Поскольку условие
![]() (1)
(1)
выполняется, то, предварительно выбранный электродвигатель принимается к установке.
5 Выбор пусковых резисторов электродвигателя
Внешнее сопротивление, которое через контактные кольца подключается е цепи ротора электродвигателя
![]() (5.1)
(5.1)
где ![]() – коэффициент, определяемый назначением механической характеристики;
– коэффициент, определяемый назначением механической характеристики; ![]() - условный порядковый номер пусковой механической характеристики;
- условный порядковый номер пусковой механической характеристики; ![]() – активное сопротивление фазы ротора, Ом;
– активное сопротивление фазы ротора, Ом; ![]() – скольжение электродвигателя в номинальном режиме;
– скольжение электродвигателя в номинальном режиме; ![]() – номинальный момент электродвигателя;
– номинальный момент электродвигателя; ![]() – начальный пусковой момент электродвигателя на регулировочной или пусковой механической характеристике, Нм.
– начальный пусковой момент электродвигателя на регулировочной или пусковой механической характеристике, Нм.
Для регулировочных механических характеристик коэффициент ![]() =1, для пусковых характеристик
=1, для пусковых характеристик
 , (5.2)
, (5.2)
где ![]() Нм – момент переключения.
Нм – момент переключения.
Активное сопротивление фазы ротора электродвигателя принимается в соответствии с паспортными данными ![]() Ом.
Ом.
Значение ![]() принимается в соответствии с функциональным назначением механических характеристик: для пуска
принимается в соответствии с функциональным назначением механических характеристик: для пуска ![]() Нм.
Нм.
Число пусковых механических характеристик
 (5.3)
(5.3)
где ![]() – скольжение электродвигателя в установившемся режиме на конечной механической характеристике. Если двигатель управляется магнитным контроллером типа КС или тиристорной панелью ДЭТП-3, то принимаем
– скольжение электродвигателя в установившемся режиме на конечной механической характеристике. Если двигатель управляется магнитным контроллером типа КС или тиристорной панелью ДЭТП-3, то принимаем ![]() , так как в роторной цепи асинхронного электродвигателя остается не выведенная часть сопротивления.
, так как в роторной цепи асинхронного электродвигателя остается не выведенная часть сопротивления.
Вычисляем действительное значение ![]() по формуле:
по формуле:
 . (5.4)
. (5.4)
Из расчета действительного значения ![]() по формуле (5.4) видно, что оно хорошо согласуется с её принятым значением.
по формуле (5.4) видно, что оно хорошо согласуется с её принятым значением.
Данные расчета коэффициентов ![]() и сопротивлений
и сопротивлений ![]() по формулам (5.2) и (5.1) сведем в таблицу 5.1.
по формулам (5.2) и (5.1) сведем в таблицу 5.1.
Таблица 5.1
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 1 | 0,819 | 0,672 | 0,550 | 0,451 | 0,370 | 0,303 | 0,248 |
| 0,815 | 0,668 | 0,548 | 0,448 | 0,368 | 0.302 | 0,247 | 0,202 |
Сопротивление секции внешнего резистора для каждой ступени пуска
![]()
(5.5)
где ![]() – условный порядковый номер ступени пуска;
– условный порядковый номер ступени пуска; ![]() – сопротивление в цепи ротора на двух соседних механических характеристиках:
– сопротивление в цепи ротора на двух соседних механических характеристиках:
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом.
Ом.
6. Разработка схемы электропривода
Для механизма подъема крана за основу возьмем одну из модификаций электропривода переменного тока с магнитным контроллером типа КС с некоторыми изменениями. Защиту электродвигателя и его схемы управления от короткого замыкания будем обеспечивать с помощью автоматического выключателя с максимально-токовым расцепителем вместо максимально-токовых реле. Для защиты электродвигателя от перегрузки будем использовать тепловые реле в двух фазах обмотки статора. Не выведенные пусковые резисторы задействуем для смягчения механических характеристик в тормозных режимах.
На рис.6,1 приведена схема силовой части электропривода механизма подъема, а на рис.6.2 схема управления ним.
Схема магнитного контроллера КС предусматривает реостатное регулирование скорости асинхронного электродвигателя при подъеме груза, а также работу в режиме силового и тормозного спуска.
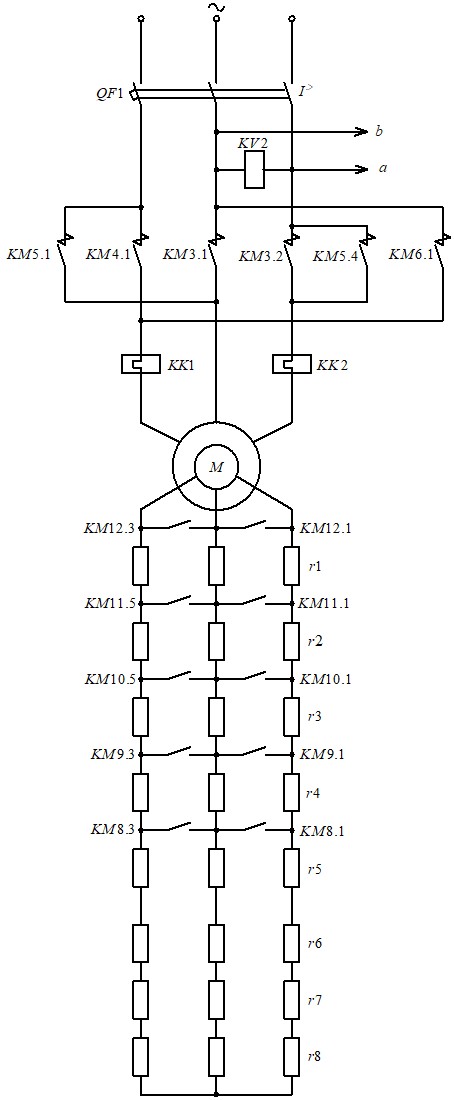
Рисунок 6.1 - Схема силовой части электропривода механизма подъема
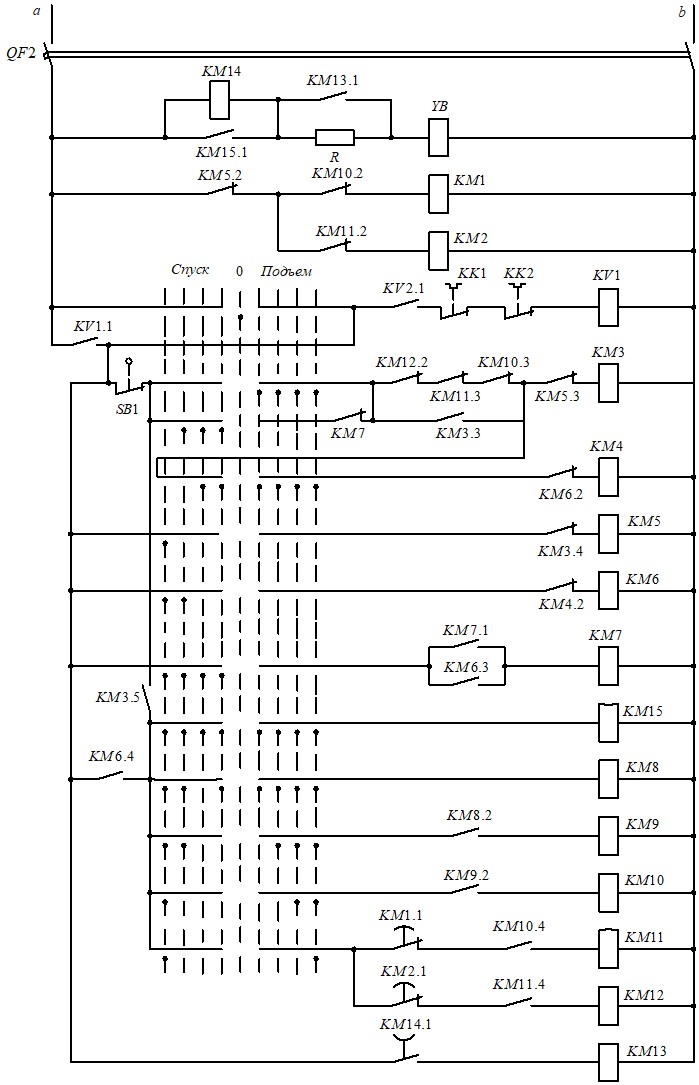
Рисунок 6.2 - Схема управления электроприводом механизма подъема
В нулевом положении рукоятки командоконтроллера контакты контакторов КМ13 и КМ15, управляющих электромагнитом тормоза YB, разомкнуты. На катушку реле KM14 через форсировочный резистор R и обмотку YB поступает напряжение, достаточное для его срабатывания. Реле KM14 своим замыкающим контактом включает контактор KМ13, который контактами КМ13.1 шунтирует резистор R и позволяет сработать тормозу YВ. Когда с помощью автоматического выключателя QF1 будет подано напряжение, сработает реле КV2. Реле КV1 получит питание, если не будет перегрузки, т. е. не сработают тепловые реле КК1 или КК2, и своим контактом КV1.1 поставит на самоблокировку КV1 и подаст питание на всю остальную схему управления.
При переводе рукоятки командоконтроллера с нулевого положения и включении реверсирующих контакторов КМ3 или КМ6 срабатывает контактор КМ15. Обмотка тормозного электромагнита YB подключается на полное напряжение сети, а катушка реле КМ14 контактом КМ15.1 замыкается накоротко. Реле КМ14 обеспечивает выдержку времени, несколько большую времени включения тормозного электромагнита YB.
После отпадания якоря реле КМ14 его замыкающий контакт КМ14.1 отключает катушку контактора КМ13, вследствие чего в цепь YB вводится сопротивление. В момент включения тормозного электромагнита к его обмотке подводится напряжение, большее номинального, вследствие чего достигается форсирование процесса включения. Потери в катушке электромагнита после включения снижаются введением ограничивающего резистора.
Защита электропривода осуществляется наличием в магнитном контроллере КС блокировки, предотвращающей включение двигателя на подъем груза, если в предшествующий рабочий период произошло приваривание одного из контакторов ускорения KM10, KM11, KM12.
В положении командоконтроллера 1, как и на всех последующих, при подъеме грузов, кроме контактора KM15, включаются контакторы направления KM4, KM3 и противовключения KM8. Далее при передвижении рукоятки командоконтроллера последовательно включаются контакторы ускорения KM9, KM10, KM11, KM12. Последние два включаются с выдержкой времени, которая обеспечивается реле ускорения KM1, KM2.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
